







作为笔者的处女座,必须得留给我心心念的激光SLAM!激光雷达点云在ROS接口下,包含二维点云格式sensor_msgs::laserscan、三维点云格式sensor_msgs::PointCloud2(实际上还有sensor_msgs::PointCloud,不过目前没用到)以及PCL的一系列格式。
1、sensor_msgs::laserscan解析
[sensor_msgs::laserscan官方释义]
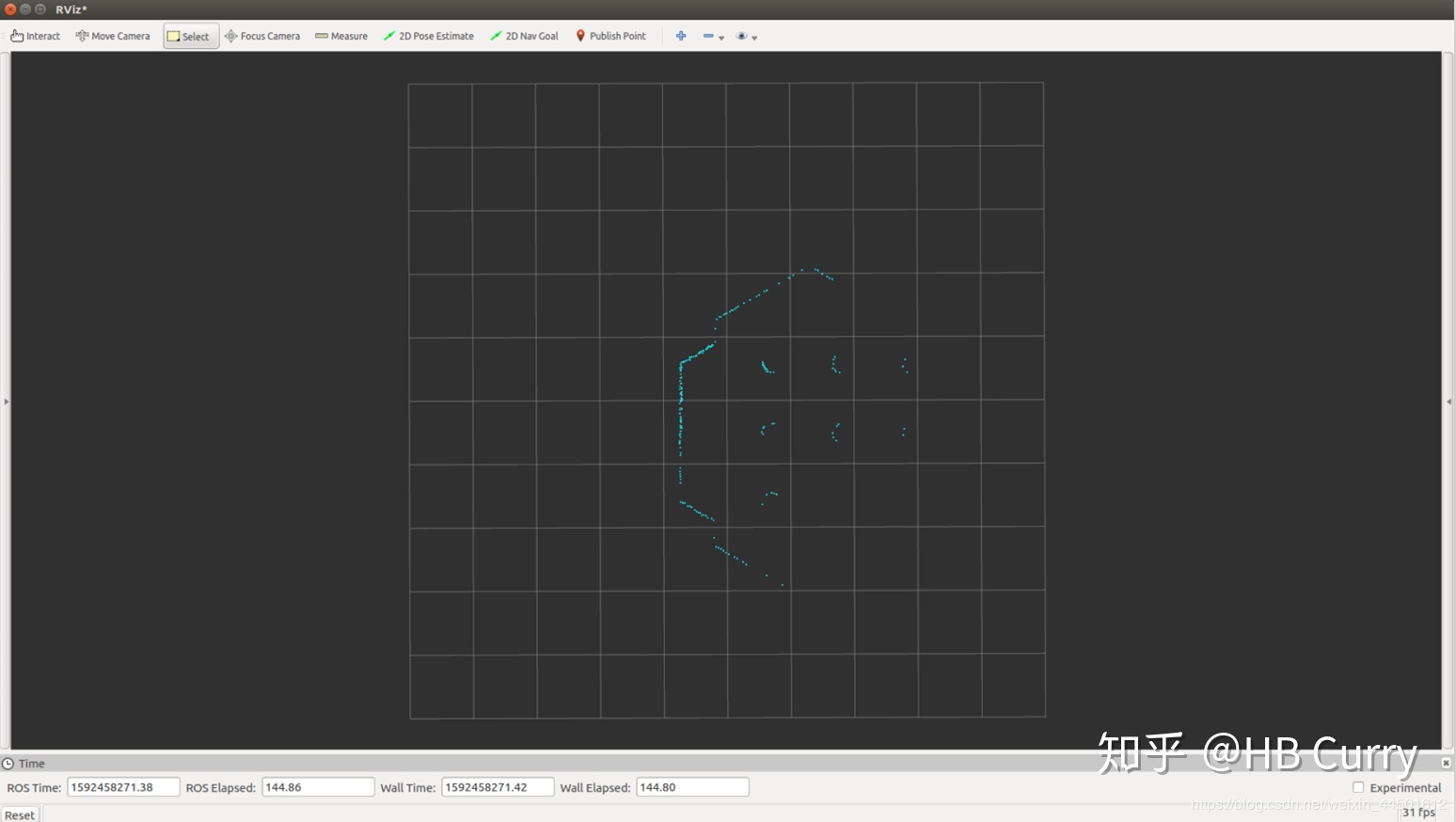
sensor_msgs/LaserScan Documentationdocs.ros.org先上图
//头文件,关键是time_stamped与frame id
header:
seq: 448
stamp:
secs: 93
nsecs: 955000000
frame_id: "base_scan"
//最大角度与最小角度,这里是0~2pi,角度为rad
angle_min: 0.0
angle_max: 6.28318977356
//角度增量,实际上就是角度步长,单位为rad;
//(angle_max-angle_min)/angle_increment即为激光束选择一圈所获得的点云数据数量
angle_increment: 0.0175019223243
//关于激光点云运动时间的问题,目前未应用,直接借鉴官网解释吧
time_increment: 0.0
s 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6655
6655











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









