







http://docs.ros.org/en/api/sensor_msgs/html/msg/PointCloud2.html
一个仿真的点云消息长这样
fileds中的内容是对data[ ]中的数据的格式的说明
$ rostopic echo /airsim_node/Drone0/lidar/LidarSensor1
header:
seq: 2116
stamp:
secs: 1586919439
nsecs: 448866652
frame_id: "LidarSensor1"
height: 1
width: 3
fields:
-
name: "x"
offset: 0
datatype: 7
count: 1
-
name: "y"
offset: 4
datatype: 7
count: 1
-
name: "z"
offset: 8
datatype: 7
count: 1
is_bigendian: False
point_step: 12 //根据上面定义的fields,一个点的xyz数据总长度为12Byte
row_step: 36 //一行点的数据总长度(无序点云的所有点都在1行中),在这个例子中有3个点,所以一行的数据长度为12*3=36
data: [143, 194, 117, 53, 10, 215, 163, 53, 222, 238, 165, 64, 143, 194, 117, 53, 10, 215, 163, 53, 222, 238, 165, 64, 143, 194, 117, 53, 10, 215, 163, 53, 222, 238, 165, 64]
is_dense: True
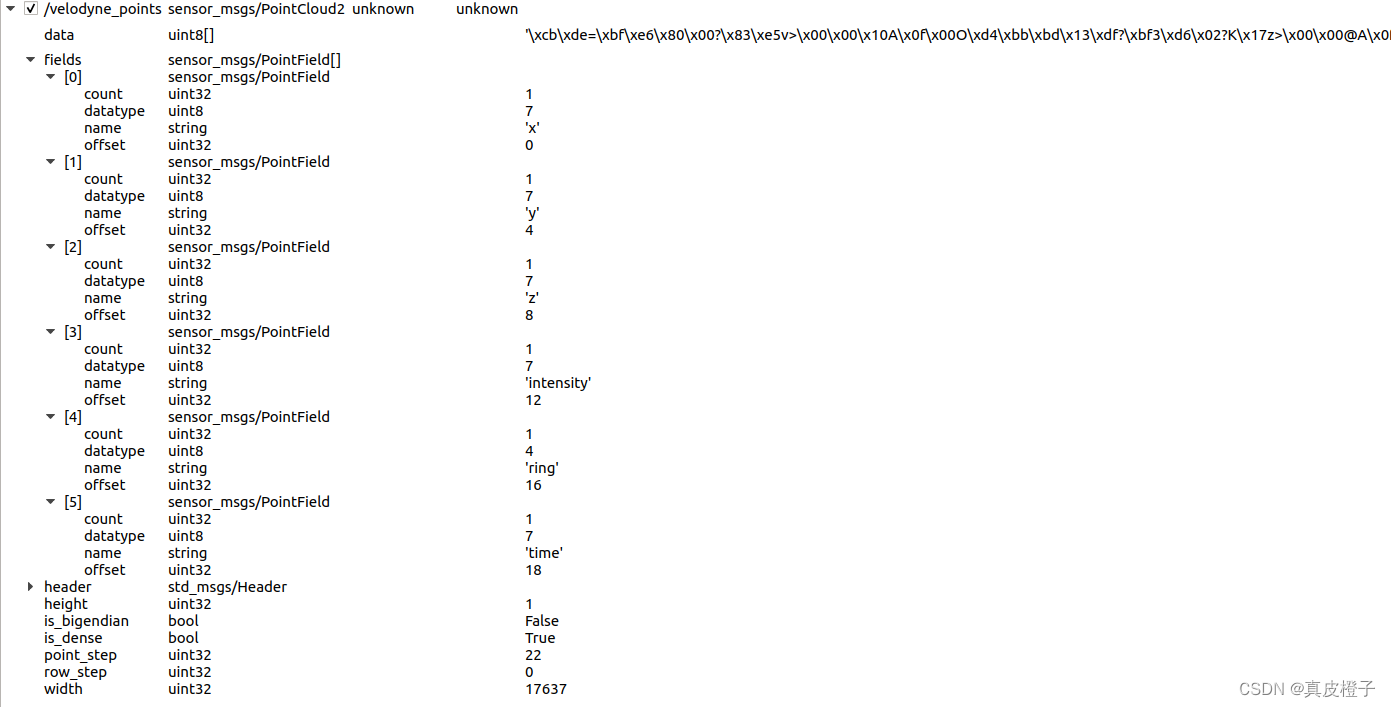
vlp16的点云的fileds:















 671
671











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









