






遇到的问题,目前的毫米波雷达数据很稀疏,用excel存储,需要转换过去,测试一下当前的激光雷达算法,并测试。
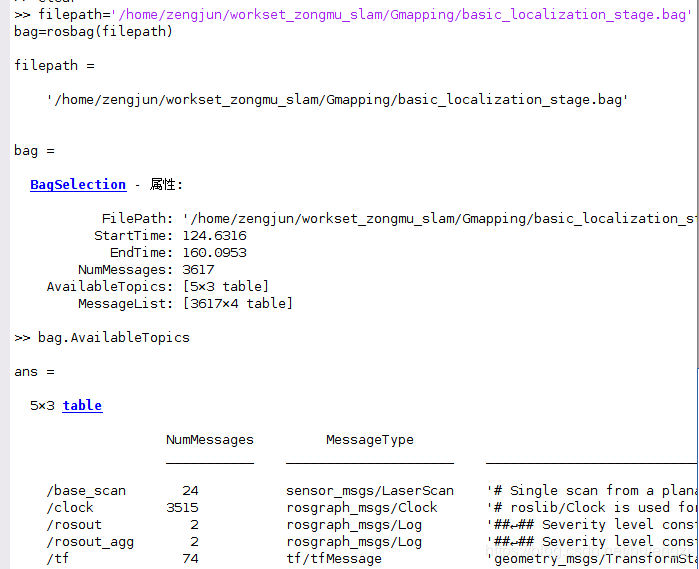
rosbag数据用matlab(linux版本)可以方便的查看变量和topic
一. 第一步,用激光雷达数据测试
[转载自:https://blog.csdn.net/fk1174/article/details/52673413】
第二种办法,首先去http://kaspar.informatik.uni-freiburg.de/~slamEvaluation/datasets.php下载数据集,我用的是Intel Research Lab 的数据集,保存为intel.clf。(clf是一种日志存储格式)

怎么下载呢?运行这语句就可以了。
wget http://ais.informatik.uni-freiburg.de/slamevaluation/datasets/aces.clf
编写把clf文件转化为rosbag文件的python脚本:
#!/usr/bin/env python
'''This is a converter for the Intel Research Lab SLAM dataset
( http://kaspar.informatik.uni-freiburg.de/~slamEvaluation/datasets/intel.clf )
to rosbag'''
import rospy
import rosbag
from sensor_msgs.msg import LaserScan
from nav_msgs.msg import Odometry
from math import pi
from tf2_msgs.msg import TFMessage
from geometry_msgs.msg import TransformStamped
import tf
def make_tf_msg(x, y, theta, t,base,base0):
trans = TransformStamped()
trans.header.stamp = t
trans.header.frame_id = base
trans.child_frame_id = base0
trans.transform.translation.x = x
trans.transform.translation.y = y
q = tf.transformations.quaternion_from_euler(0, 0, theta)
trans.transform.rotation.x = q[0]
trans.transform.rotation.y = q[1]
trans.transform.rotation.z = q[2]
trans.transform.rotation.w = q[3]
msg = TFMessage()
msg.transforms.append(trans)
return msg
with open('/home/kylefan/catkin_ws/data/intel/intel.clf') as dataset:
with rosbag.Bag('/home/kylefan/intel.bag', 'w') as bag:
for line in dataset.readlines():
line = line.strip()
tokens = line.split(' ')
if len(tokens) <= 2:
continue
if tokens[0] == 'FLASER':
msg = LaserScan()
num_scans = int(tokens[1])
if num_scans != 180 or len(tokens) < num_scans + 9:
rospy.logwarn("unsupported scan format")
continue
msg.header.frame_id = 'base_link'
t = rospy.Time(float(tokens[(num_scans + 8)]))
msg.header.stamp = t
msg.angle_min = -90.0 / 180.0 * pi
msg.angle_max = 90.0 / 180.0 * pi
msg.angle_increment = pi / num_scans
msg.time_increment = 0.2 / 360.0
msg.scan_time = 0.2
msg.range_min = 0.001
msg.range_max = 50.0
msg.ranges = [float(r) for r in tokens[2:(num_scans + 2)]]
bag.write('scan', msg, t)
odom_x, odom_y, odom_theta = [float(r) for r in tokens[(num_scans + 2):(num_scans + 5)]]
tf_msg = make_tf_msg(odom_x, odom_y, odom_theta, t,'base_link','base_laser_link')
bag.write('tf', tf_msg, t)
elif tokens[0] == 'ODOM':
odom_x, odom_y, odom_theta = [float(t) for t in tokens[1:4]]
t = rospy.Time(float(tokens[7]))
tf_msg = make_tf_msg(odom_x, odom_y, odom_theta, t,'odom','base_link')
bag.write('tf', tf_msg, t)
保存为bag.py,放到ros包beginner_tutorials的scripts文件夹下,然后:
chmod +x bag.py
在这之前,需要建立好beginner_tutorials的package,然后:source ./devel/setup.bash
rosrun beginner_tutorials bag.py
就把激光和odom的数据按照真实的时间点写入到了intel.bag里了。
最后
rosbag play intel.bag
激光的数据就发布到/laser了,这样就实现模拟的作用了。
这时候想再rviz里看看,记得要在左上角Global Options里面设置/odom为fixed的:


参考大神:http://answers.ros.org/question/233042/in-ros-gmapping-how-to-use-intel-research-lab-dataset/
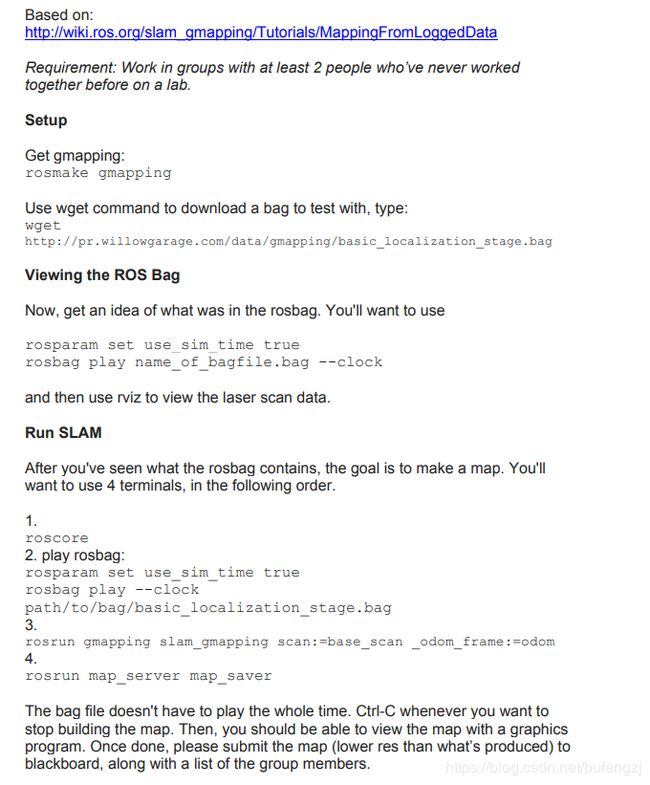
具体怎么运行呢?
Bring up the master: roscore
Make sure that use_sim_time is set to true before any nodes are started: rosparam set use_sim_time true (运行rosbag数据就是true,实际数据就是false)
Bring up slam_gmapping, which will take in laser scans (in this case, on the base_scan topic) and produce a map: rosrun gmapping slam_gmapping scan:=scan (我们前面bag.write写入的就是scan)
这里,也可以把odom里程计数据也加进去,就需要这么写
rosrun gmapping slam_gmapping scan:=scan _odom_frame:=odom (我们前面bag.write写入的就是scan)
In a new terminal, start playing back the bag file to feed data to slam_gmapping: rosbag play --clock
Wait for rosbag to finish and exit.
Save your new map to disk using map_saver from the map_server package: rosrun map_server map_saver -f
遇到的一些问题
0. ros 编译 Python 文件
https://blog.csdn.net/light_jiang2016/article/details/55505627
1. 问题与解决
No handlers could be found for logger rosout
解决方法:
在转换文件(.py)的开头加上:
import logging
logging.basicConfig()
其他参考资料
参考网站:http://wiki.ros.org/slam_gmapping/Tutorials/MappingFromLoggedData
https://stackoverflow.com/questions/53642503/how-to-convert-csv-to-rosbag
https://gaoyichao.com/Xiaotu/?book=turtlebot&title=gmapping%E7%9A%84ROS%E5%B0%81%E8%A3%85 GMapping的ROS封装——初始化
rosnode info /slam_gmapping
----------------------------------------------------
Node [/slam_gmapping]
Publications:
* /map_metadata [nav_msgs/MapMetaData]
* /tf [tf2_msgs/TFMessage]
* /map [nav_msgs/OccupancyGrid]
* /rosout [rosgraph_msgs/Log]
* /slam_gmapping/entropy [std_msgs/Float64]
Subscriptions:
* /tf [tf2_msgs/TFMessage]
* /scan [sensor_msgs/LaserScan]
* /tf_static [tf2_msgs/TFMessage]
* /clock [rosgraph_msgs/Clock]
Services:
* /slam_gmapping/set_logger_level
* /slam_gmapping/get_loggers
* /dynamic_ma















 1101
1101











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









