




函数中的代码是部分代码,详细代码在最后
1 cv2.boundingRect
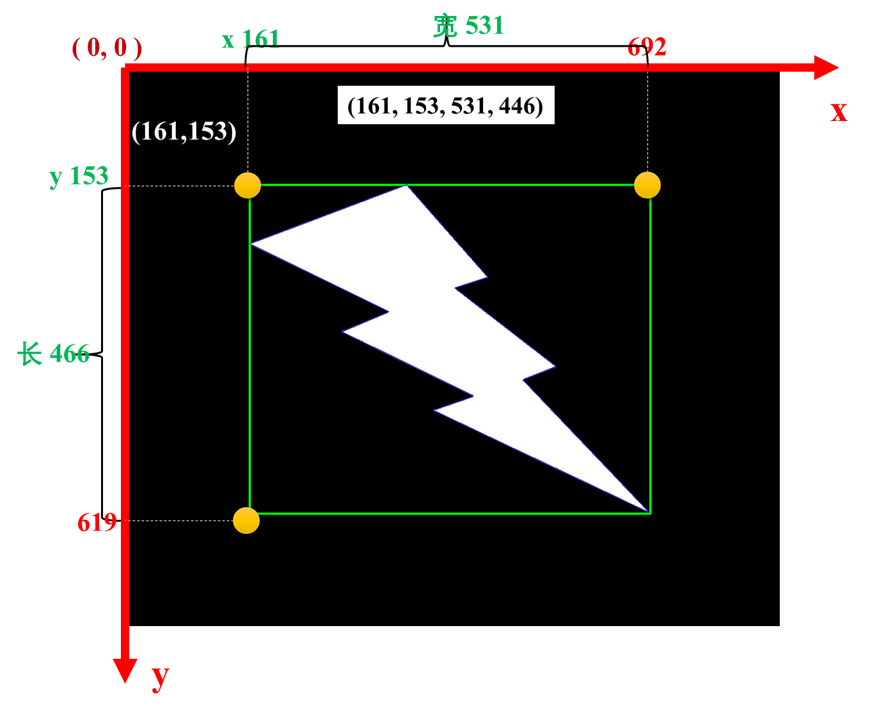
作用:矩形边框(boundingRect),用于计算图像一系列点的外部矩形边界。
cv2.boundingRect(array) -> retval
参数:
array - 灰度图像(gray-scale image)或 2D点集( 2D point set )
返回值:元组
元组(x, y, w, h ) 矩形左上点坐标,w, h 是矩阵的宽、高,例如 (161, 153, 531, 446)
代码示例:
contours, hierarchy = cv2.findContours(re_img, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) for c in contours: # find bounding box coordinates # 现计算出一个简单的边界框 x, y, w, h = cv2.boundingRect(c) # 画出矩形 cv2.rectangle(img, (x,y), (x+w, y+h), (0, 255, 0), 2)
2 cv2.minAreaRect
作用:minAreaRect - min Area Rect 最小区域矩形;计算指定点集的最小区域的边界矩形,矩形可能会发生旋转 possibly rotated,以保证区域面积最小。
cv2.minAreaRect(points) -> retval
参数:
points - 2D点的矢量( vector of 2D points )
返回值:元组
元组((最小外接矩形的中心坐标),(宽,高),旋转角度)-----> ((x, y), (w, h), θ )
关于旋转角度的注意事项:
1)旋转角度是水平轴(x轴)逆时针旋转,与碰到的矩形第一条边的夹角。
2)“ 第一条边 " 定义为 宽width,另一条边定义为高 height。这里的宽、高不是按照长短来定义的。
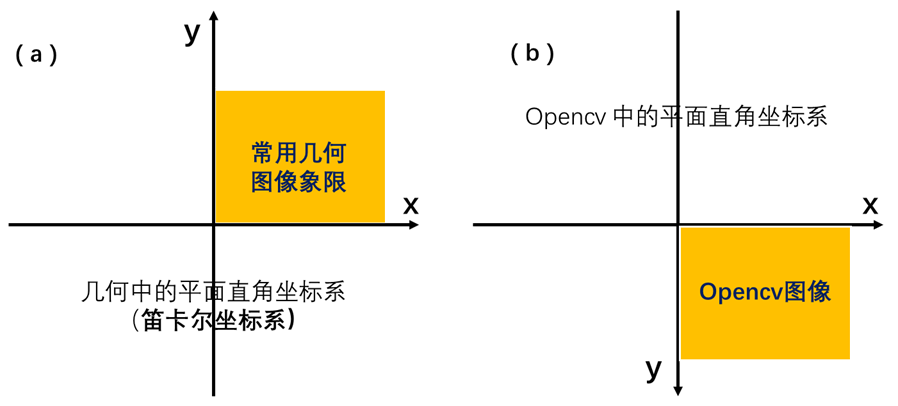
3)在 opencv 中,坐标系原点在图像左上角,将其延伸到整个二维空间,可以发现 “x轴镜像对称”,角度则 逆时针旋转为负、顺时针旋转为正。故θ∈(-90度,0];(笛卡尔坐标系中,逆时针为正、顺时针为负)
4)旋转角度为角度值,而非弧度制。
如 ((458.70343017578125, 381.97894287109375), (202.513916015625, 634.2526245117188), -45.707313537597656)
但绘制这个矩形,一般需要知道矩形的 4 个顶点坐标;通常是通过函数 cv2.boxPoints()获取。
2.1 附1 : cv2.boxPoints
作用:查找旋转矩形的 4 个顶点(用于绘制旋转矩形的辅助函数)。
cv2.boxPoints(box) -> points参数:
box - 旋转的矩形
返回值:列表list
points - 矩形 4 个顶点组成的列表 list
返回值示例:
[[614.9866 675.9137 ] [161. 232.99997] [302.4203 88.04419] [756.40686 530.9579 ]]
2.2 附2:int0
int0 有两种相近的描述,
第一种,int0 意味是 64位整数。字符代码'l'。与 Python int兼容,参考文档https://kite.com/python/docs/numpy.int0
int0 ( *args, **kwargs )第二种,等价于intp,在 数组类型和类型之间的转换 文档中,有intp,释义为 “ 用于索引的整数(与C ssize_t
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 9262
9262

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









