






汽车车载网络CAN收发器是一种将CAN数据发送器与数据接收器组合在一起的单片集成电路。
CAN收发器的
汽车车载网络CAN收发器的作用
汽车车载网络CAN收发器的作用是用于将CAN控制器提供的数据转换成电信号,然后通过汽车车载网络CAN收发器的实用电路
单片CAN收发器集成电路型号较多,较常见的型号有82C250与PCA2C250,这两种型号的集成电路可以互换。由82C250
在该电路中,C8051F040是一块混合信号处理系统超级单片微处理器,具有与8051兼容的高速CIP-51处理器,该芯片内集成了数据采集和控制系统中常用的模拟、数字外设及其他功能部件,具有64路I/O(输入/输出)接口、12路12位A/D(模拟/数字)转换器、CAN总
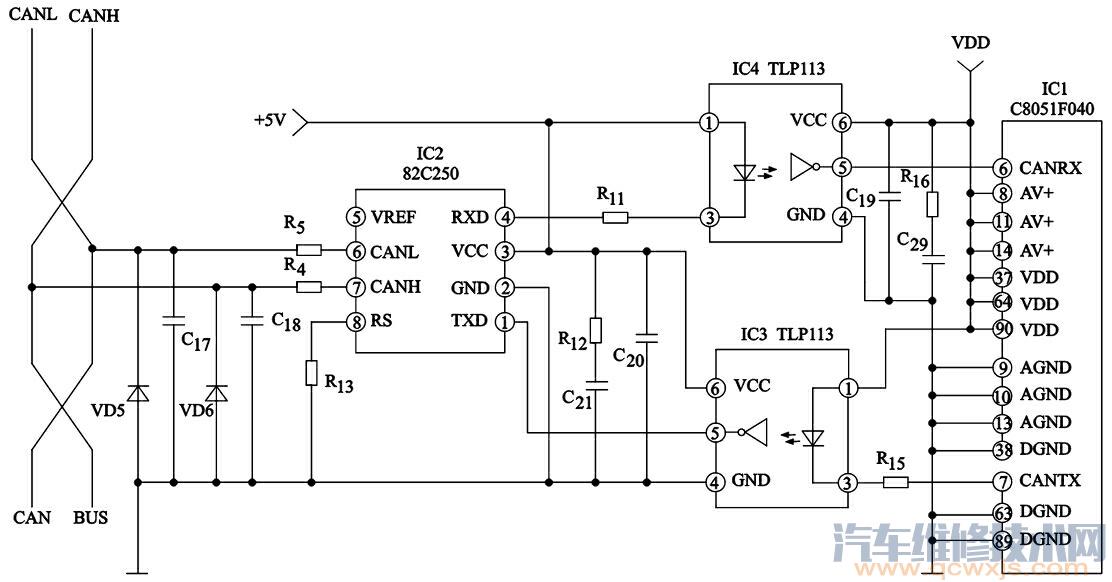
图1-12由82C250组成的CAN收发器的典型应用电路
82C250是一块高性能单片CAN收发器集成电路,具有降低射频干扰、热防护、抗

表1-6单片CAN收发器集成电路82C250各引脚功能说明
(1)电路特点
在图1-12所示电路中,为了增强CAN总线节点的抗干扰能力,C8051F040通过高速光电耦合器TLP113后与82C250相连接,由此可以实现总线上各个CAN节点间的电气隔离o
(2)电路元件作用
在图1-12所示电路中,R4与R5电阻器连接在CAN总线与82C250的CANH(⑦脚)、CANL(⑥脚)间,对输入82C250的电流进行限流,以保护集成电路不受过电流的冲击而损坏;C17与C18两只小
(3)数据发送过程
当需要发送数据时,微处理器C8051F040⑦脚就会有相应的信号输出,控制光电
(4)数据接收过程
当CAN数据传输线上的数据经R5、RdD到82C250的⑥、⑦脚内后,该
( 汽车维修技术网 http://www.qcwxjs.com/)















 3732
3732











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









