







模拟多小车控制运动任务规划
开源包:tuw_multi_robot
Wiki:http://wiki.ros.org/tuw_multi_robot
Git:https://github.com/tuw-robotics/tuw_multi_robot
运行环境:ros-kinetic
说明:
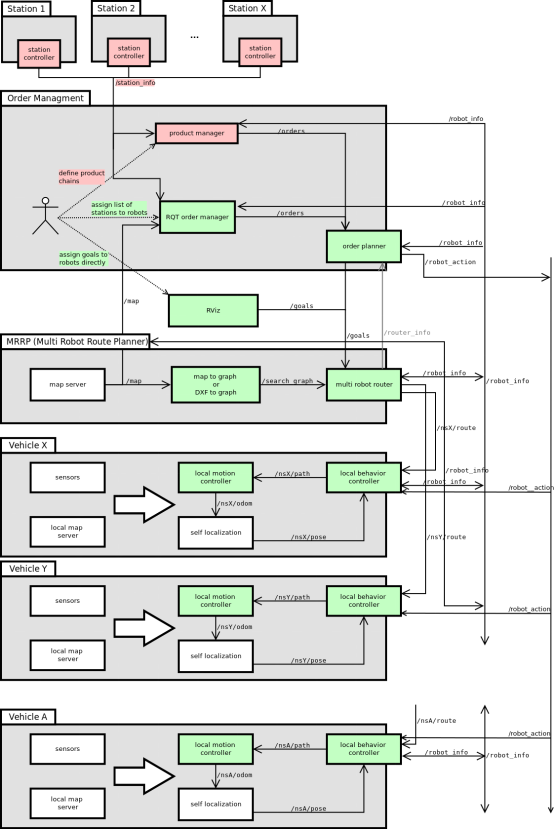
开源包预想架构:
安装:
1、 在工作空间从git上拉取响应的源码,包含以下几个包:
如,我本机:cd ~/cw/src
将以上四个包全部拉取到本地:
2、 cd .. catkin_make
运行示例:
1、 启动3个机器人
启动命令:roslaunch tuw_multi_robot_demo demo.launch room:=cave nr_of_robots:=3
也可以通过rviz中的Goal Selector 选择3个目标点,控制机器人移动。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 6557
6557











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









