







基于视觉的无人机导航由以下几部分构成。在外部感知和本体感知传感器的输入下,经过内部定位和测绘、避障和路径规划处理后,导航系统将最终输出连续控制,将无人机驱动到目标位置。
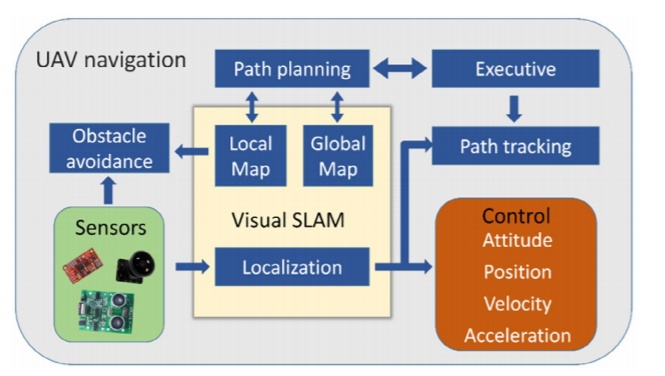
这里只写导航中视觉定位与建图部分的综述。主要可分为以下几个部分:
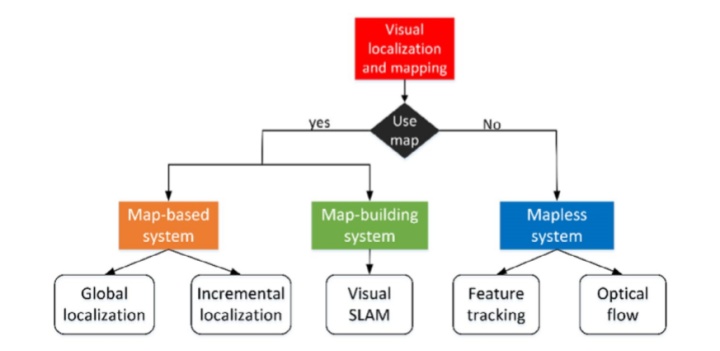
- 不基于地图的导航系统
不基于地图的导航主要有光流法和特征追踪法。一般来说,可以将光流技术分为两类:全局方法( Horn和Schunck,1981 )和局部方法( Lucas和Kanade,1981 )。早在1993年,Santos - Victor等人发明了一种模拟蜜蜂飞行行为的方法,通过机器人两侧的摄像机来估计物体的运动。首先,它分别计算两个凸轮相对于墙壁的光学速度。如果它们相同,机器人会沿着中心线移动;否则,机器人会沿着小地方的速度向前移动。然而,在无纹理环境中导航时,它的性能很差。从那时起,我们看到了光流方法的巨大发展,并在检测和跟踪领域取得了一些突破。最近,提出了一种利用光流进行场景变化检测和描述的新方法( Nourani - Vat
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4410
4410











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









