







介绍
本文主要依托于Brett Beauregard大神针对Arduino平台撰写的PID控制库Arduino PID Library及其对应的帮助博客Improving the Beginner’s PID。在没有Brett Beauregard帮助之前,也尝试过按照PID控制基本理论写过PID控制程序,并成功应用于工业设备中,但从未深入考虑过将其写成适合工业控制的通用库。根据Brett Beauregard的理念,此PID库主要想为以下两类人服务:
- 想要从事Arduino PID控制的同志,提供一个快速入门的方法
- 已经拥有自己的PID控制算法,想要从中获取到一些新点子的同志。
本文在上述基础上,主要有以下几方面工作:
- 对Brett Beauregard的PID控制库代码进行必要的说明
- 对其博客教程核心思想进行必要的说明
- 对其依托PID控制库改进的autoPID控制库进行必要的说明。
背景
接触过PID控制的工程师应当都会对下面的公式印象深刻:
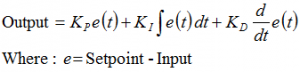
上述公式的具体说明就不加以说明了,请各位参考维基百科的PID controller。大部分同志可能会写出如下代码(或者类似),包括我自己
/*working variables*/
unsigned long lastTime;
double Input, Output, Setpoint;
double errSum, lastErr;
double kp, ki, kd;
void Compute()
{
/*How long since we last calculated*/
unsigned long now = millis();
double timeChange = (double)(now - lastTime);
/*Compute all the working error variables*/
double error = Setpoint - Input;
errSum += (error * timeChange);
double dErr = (error - lastErr) / timeChange;
/*Compute PID Output*/
Output = kp * error + ki * errSum + kd * dErr;
/*Remember some variables for next time*/
lastErr = error;
lastTime = now;
}
void SetTunings(double Kp, double Ki, double Kd)
{
kp = Kp;
ki = Ki;
kd = Kd;
}其中,Compute() 在需要进行PID控制量计算的任何时候被调用,在这样的代码支持下,PID控制可以工作得很好。但是,如果是一个性能较强的工业控制器,还需要考虑一下几个问题:
- 采样时间——改变采样时间会带来怎样的后果
- 微分项的影响——突然改变设定值或者微分时间,如何避免冲击
- PID参数改变——PID控制参数的突然改变,如何避免突变
- 积分参数——突然改变I参数,如何便面冲击
- 开关——在控制过程中,PID调节开关突然的开启及关闭
- 初始化——PID运行一段时候后关闭,经过一段时间再次开启,如何避免突变
- 调节的方向——这个不是大问题,仅仅是为了保证系统超预计的方向运行
如果上述几个问题没有太多的理解,没关系,先看一下PID库中代码是如何写的(如果仅想看上述7个问题的解决方案请跳过下一章节)。
代码注释
头文件
#ifndef PID_v1_h
#define PID_v1_h
#define LIBRARY_VERSION 1.1.1
class PID
{
public:
//Constants used in some of the functions below
// 这里定义的两个变量分别指代两种工作模式:AUTOMATIC 对应 PID控制开启; MANUAL 对应PID控制关闭
#define AUTOMATIC 1
#define MANUAL 0
// 这里定义两个变量分别指代控制量与被控量方向:DIRECT 对应两者同向; REVERSE 对应两者反向
// 其中同向指: 如果控制量增大,那么被控量也会增大;反之亦然。
// 其中反向指: 如果控制量增大,那么被控量缺减小;反之亦然。
#define DIRECT 0
#define REVERSE 1
//commonly used functions **************************************************************************
//构造函数
PID(double*, double*, double*, // * constructor. links the PID to the Input, Output, and
double, double, double, int); // Setpoint. Initial tuning parameters are also set here
// 设置自动模式还是手动模式,两者区别目前还未清楚
void SetMode(int Mode); // * sets PID to either Manual (0) or Auto (non-0)
// 计算PID, 在每个计算周期都应当调用 ,计算频率和是否计算可以在setMode和SetSampleTime中指定
bool Compute(); // * performs the PID calculation. it should be
// called every time loop() cycles. ON/OFF and
// calculation frequency can be set using SetMode
// SetSampleTime respectively
//指定输出的范围,其中0-255,表示可限制的输出范围
void SetOutputLimits(double, double); //clamps the output to a specific range. 0-255 by default, but
//it's likely the user will want to change this depending on
//the application
//available but not commonly used functions ********************************************************
// 设定P、I、D参数,可以在运行的时间周期内,指定运行需要的参数
void SetTunings(double, double, // * While most users will set the tunings once in the
double); // constructor, this function gives the user the option
// of changing tunings during runtime for Adaptive control
// 设定控制器的方向,限制输出的正反向,仅需要在开始的时候设置一次
void SetControllerDirection(int); // * Sets the Direction, or "Action" of the controller. DIRECT
// means the output will increase when error is positive. REVERSE
// means the opposite. it's very unlikely that this will be needed
// once it is set in the constructor.
// 采样周期,以毫秒作为设置单位,默认为10
void SetSampleTime(int); // * sets the frequency, in Milliseconds, with which
// the PID calculation is performed. default is 100
//Display functions ****************************************************************
// 获取PID运行参数
double GetKp(); // These functions query the pid for interal values.
double GetKi(); // they were created mainly for the pid front-end,
double GetKd(); // where it's important to know what is actually
// 获取运行模式
int GetMode(); // inside the PID.
//获取PID 方向
int GetDirection(); //
private:
// 此函数初始化,还不知什么用,需要参考CPP
void Initialize();
double dispKp; // * we'll hold on to the tuning parameters in user-entered
double dispKi; // format for display purposes
double dispKd; //
double kp; // * (P)roportional Tuning Parameter
double ki; // * (I)ntegral Tuning Parameter
double kd; // * (D)erivative Tuning Parameter
int controllerDirection;
// 其中包含了INput、 OUTput以及setPoint
double *myInput; // * Pointers to the Input, Output, and Setpoint variables
double *myOutput; // This creates a hard link between the variables and the
double *mySetpoint; // PID, freeing the user from having to constantly tell us
// what these values are. with pointers we'll just know.
// 此3个参数需要参考CPP才知道
unsigned long lastTime;
double ITerm, lastInput;
unsigned long SampleTime;
double outMin, outMax;
// 是否自动参数的标志
bool inAuto;
};
#endif
源文件
/**********************************************************************************************
* Arduino PID Library - Version 1.1.1
* by Brett Beauregard <br3ttb@gmail.com> brettbeauregard.com
* This Library is licensed under a GPLv3 License
**********************************************************************************************/
#include "PID_v1.h"
/*Constructor (...)*********************************************************
* The parameters specified here are those for for which we can't set up
* reliable defaults, so we need to have the user set them.
***************************************************************************/
PID::PID(double* Input, double* Output, double* Setpoint,
double Kp, double Ki, double Kd, int ControllerDirection)
{
// 赋值控制量、被控量及设定值初始地址,注意这里是地址
myOutput = Output;
myInput = Input;
mySetpoint = Setpoint;
// 初始化auto模式为false
inAuto = false;
// 默认控制量限制在0到255,此函数可以根据实际系统需要修改控制量输出限制范围
PID::SetOutputLimits(0, 255); //default output limit corresponds to
//the arduino pwm limits
// 默认采样周期为100ms,同样可以根据需求修改
SampleTime = 100; //default Controller Sample Time is 0.1 seconds
// 设置输出的方向
PID::SetControllerDirection(ControllerDirection);
// 设置PID 控制参数
PID::SetTunings(Kp, Ki, Kd);
// 用于存储PID构造时,对应的系统运行时间
// millis()作用是获取当前系统运行时间(单位ms),此函数针对arduino;移植到别的系统,可以其他类似作用函数替代
// 这里减去SampleTime是为了保证在构造后能力马上进行PID控制,而不需要等待到下一个SampleTime周期
lastTime = millis()-SampleTime;
}
/* Compute() **********************************************************************
* This, as they say, is where the magic happens. this function should be called
* every time "void loop()" executes. the function will decide for itself whether a new
* pid Output needs to be computed. returns true when the output is computed,
* false when nothing has been done.
* 此函数用于PID控制量计算,函数可以频繁的在进程中被调用。
**********************************************************************************/
bool PID::Compute()
{
// 如果没有开启PID返回 计算失败,退出;控制量不变,仍为上一次控制量
if(!inAuto) return false;
// 获取当前系统运行时间并求出相对上一次计算时间间隔
unsigned long now = millis();
unsigned long timeChange = (now - lastTime);
// 如果时间间隔大于或者等于采样时间,那么则计算,否则不满足采样条件,计算失败,退出;
if(timeChange>=SampleTime)
{
/*Compute all the working error variables*/
// 保存当前被控量,如果是一个实时控制系统,此时被控量可能与构造时的被控量不一致
double input = *myInput;
// 求出设定值与当前被控量之间的偏差
double error = *mySetpoint - input;
// 计算积分项 此处积分项和标准PID控制方程略微有差距
ITerm+= (ki * error);
// 如果 积分项超过最大限制,那么设置积分项为最大限制;同样,最小限制也做同样处理
// 此处为何这么做一句两句说不清楚,主要是为了PID 控制量长时间超限后,突然降低设定值,能够让系统马上反应而不会产生一个时间滞后。
if(ITerm > outMax) ITerm= outMax;
else if(ITerm < outMin) ITerm= outMin;
// 求出两个被控量之间偏差,也就是在计算周期(这里不用采用周期是因为计算周期可能会超过采样周期)被控量的变化。
// 其实就是微分项的 因子,但是看起来和标准表达式也不一样啊!!!
// 。。。。一两句也说不清楚,总的来说是为了防止控制量和被控量突变
double dInput = (input - lastInput);
/*Compute PID Output*/
// PID 调节算式,这就不需要说明了
double output = kp * error + ITerm- kd * dInput;
// 这里做限制和ITerm做限制的作用是一样的。。
if(output > outMax) output = outMax;
else if(output < outMin) output = outMin;
*myOutput = output;
/*Remember some variables for next time*/
lastInput = input;
lastTime = now;
return true;
}
else return false;
}
/* SetTunings(...)*************************************************************
* This function allows the controller's dynamic performance to be adjusted.
* it's called automatically from the constructor, but tunings can also
* be adjusted on the fly during normal operation
* 此函数用于设定PID调节参数
******************************************************************************/
void PID::SetTunings(double Kp, double Ki, double Kd)
{
// 如果PID参数中有小于0的参数,那么设定失败,直接退出,仍然沿用原来的参数
if (Kp<0 || Ki<0 || Kd<0) return;
// 仅做显示用。
dispKp = Kp; dispKi = Ki; dispKd = Kd;
// 获取采样时间,由ms转为s
double SampleTimeInSec = ((double)SampleTime)/1000;
// 调整PID参数, I 和 D 参数的调节主要是为了满足采样周期改变带导致的影响,
// 主要是 积分项和 微分项是和时间有关的参数,所以采样周期改变会导致这两项需要重新计算,这里为了减少这些工作,将采样周期变换转换我I D参数变化
// 至于为什么可以这么做,是因为前面做了特殊处理,修改了PID标准表达式,使每一次计算对历史依赖较小
kp = Kp;
ki = Ki * SampleTimeInSec;
kd = Kd / SampleTimeInSec;
// 设定PID调节方向
if(controllerDirection ==REVERSE)
{
kp = (0 - kp);
ki = (0 - ki);
kd = (0 - kd);
}
}
/* SetSampleTime(...) *********************************************************
* sets the period, in Milliseconds, at which the calculation is performed
******************************************************************************/
//更新新的采样时间,同时按照比例更新ID参数
void PID::SetSampleTime(int NewSampleTime)
{
if (NewSampleTime > 0)
{
double ratio = (double)NewSampleTime
/ (double)SampleTime;
ki *= ratio;
kd /= ratio;
SampleTime = (unsigned long)NewSampleTime;
}
}
/* SetOutputLimits(...)****************************************************
* This function will be used far more often than SetInputLimits. while
* the input to the controller will generally be in the 0-1023 range (which is
* the default already,) the output will be a little different. maybe they'll
* be doing a time window and will need 0-8000 or something. or maybe they'll
* want to clamp it from 0-125. who knows. at any rate, that can all be done
* here.
* 此函数容易产生控制量的突变,在运行过程中,尽量不要缩小范围
**************************************************************************/
void PID::SetOutputLimits(double Min, double Max)
{
// 赋值限制
if(Min >= Max) return;
outMin = Min;
outMax = Max;
if(inAuto)
{
if(*myOutput > outMax) *myOutput = outMax;
else if(*myOutput < outMin) *myOutput = outMin;
if(ITerm > outMax) ITerm= outMax;
else if(ITerm < outMin) ITerm= outMin;
}
}
/* SetMode(...)****************************************************************
* Allows the controller Mode to be set to manual (0) or Automatic (non-zero)
* when the transition from manual to auto occurs, the controller is
* automatically initialized
******************************************************************************/
void PID::SetMode(int Mode)
{
bool newAuto = (Mode == AUTOMATIC);
// 如果模式不一样,那么则重新初始化
if(newAuto == !inAuto)
{ /*we just went from manual to auto*/
PID::Initialize();
}
inAuto = newAuto;
}
/* Initialize()****************************************************************
* does all the things that need to happen to ensure a bumpless transfer
* from manual to automatic mode.
******************************************************************************/
void PID::Initialize()
{
ITerm = *myOutput;
lastInput = *myInput;
if(ITerm > outMax) ITerm = outMax;
else if(ITerm < outMin) ITerm = outMin;
}
/* SetControllerDirection(...)*************************************************
* The PID will either be connected to a DIRECT acting process (+Output leads
* to +Input) or a REVERSE acting process(+Output leads to -Input.) we need to
* know which one, because otherwise we may increase the output when we should
* be decreasing. This is called from the constructor.
******************************************************************************/
void PID::SetControllerDirection(int Direction)
{
if(inAuto && Direction !=controllerDirection)
{
kp = (0 - kp);
ki = (0 - ki);
kd = (0 - kd);
}
controllerDirection = Direction;
}
/* Status Funcions*************************************************************
* Just because you set the Kp=-1 doesn't mean it actually happened. these
* functions query the internal state of the PID. they're here for display
* purposes. this are the functions the PID Front-end uses for example
******************************************************************************/
double PID::GetKp(){ return dispKp; }
double PID::GetKi(){ return dispKi;}
double PID::GetKd(){ return dispKd;}
int PID::GetMode(){ return inAuto ? AUTOMATIC : MANUAL;}
int PID::GetDirection(){ return controllerDirection;}
(这里代码过长,提供下载地址)。
上述代码提供对PID库的必要注释,其中有些注释无法一两句话就能说清,特别是针对上述7个问题的解决方案,具体的代码分析,请参考下一章节。
如有不足之处请告知,^.^
下一章节将分析采样时间变化对PID控制的影响
PS:转载请注明出处:欧阳天华

















 1161
1161

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









