






“伺服”一词源于希腊语“奴隶”的意思,伺服电机可以理解为绝对服从控制信号指挥的电机。在控制信号发出之前,转子静止不动,当控制信号发出时,转子立即转动;当控制信号消失时,转子能即时停转。
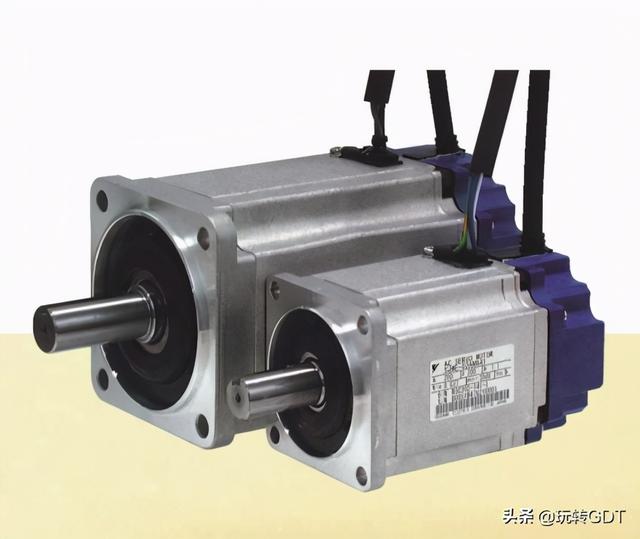
伺服电动机分为直流伺服电机和交流伺服电机。直流伺服电机比较便宜,交流伺服电机比较常用。有同步和异步之分,伺服电机有优越的控制特性、精密能力和高速表现。由于具备的突出性能,在非标自动化设备中被广泛应用,在自动化应用场合主要是一些要求比较严苛的高速高精度以及频繁加减速的移载和定位工艺场合。
非标自动化设计中常说的闭环控制
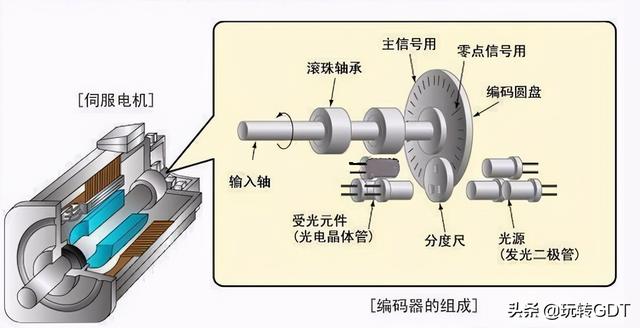
伺服电机是自动控制装置中被用作执行元件的微特电机,其功能是将电信号转换成转轴的角位移或角速度。伺服电机主要是靠伺服驱动器来控制。伺服驱动器是与电动机配套的电控器件,可触发脉冲信号,伺服电动机接收到1个脉冲就会旋转1个对应的角度,从而实现角位移。
因为伺服电动机也具备发出脉冲的功能,所以伺服电动机每旋转一个角度,都会发出对应数量的脉冲反馈,这样和伺服电动机接受的脉冲形成了呼应,这就是非标自动化设计中常说的闭环控制。系统就会知道发了多少脉冲给伺服电动机,同时又收了多少脉冲回来,从而很精确地控制电动机的转动。
伺服电机的三种控制方式
1.转矩控制
如果你对电机的速度、位置都没有要求,当然用转矩模式。主要应用在对材质受力有严格要求的缠绕和放卷装置中,例如绕线装置或拉光纤设备。
2.位置控制
如果对位置和速度有一定精度要求,而对实时转矩不是很关心,用速度或位置模式比较好,应用领域如数控机床、自动化设备、印刷机械等。
3.速度模式
如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一些,就伺服驱动器响应速度来看,转矩模式运算量最小,控制器对控制信号的响应最快。而位置模式运算量最大,驱动器对控制信号的响应最慢。
伺服电机的选型计算流程
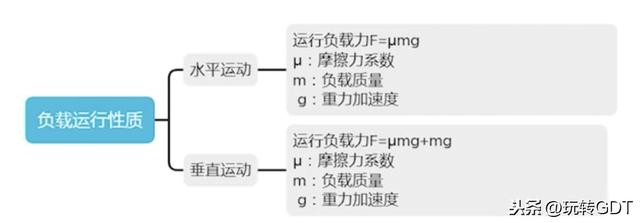
1.首先要确定负载的性质,是水平还是垂直负载。
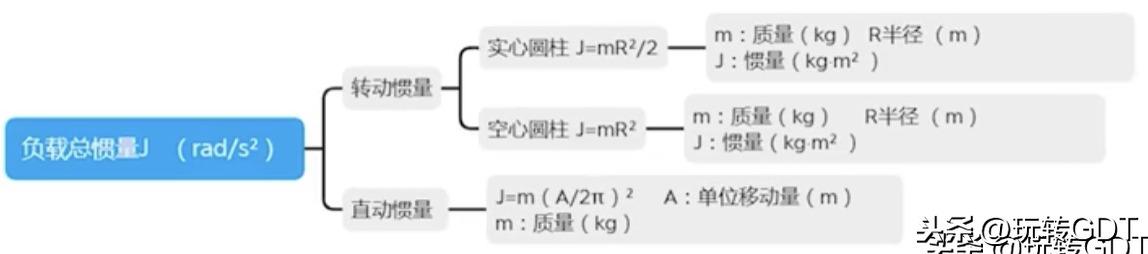
2.要根据设计要求计算负载端惯量,包括转动惯量和平动惯量。
3.要根据负载运行速度,计算负载运行转速。

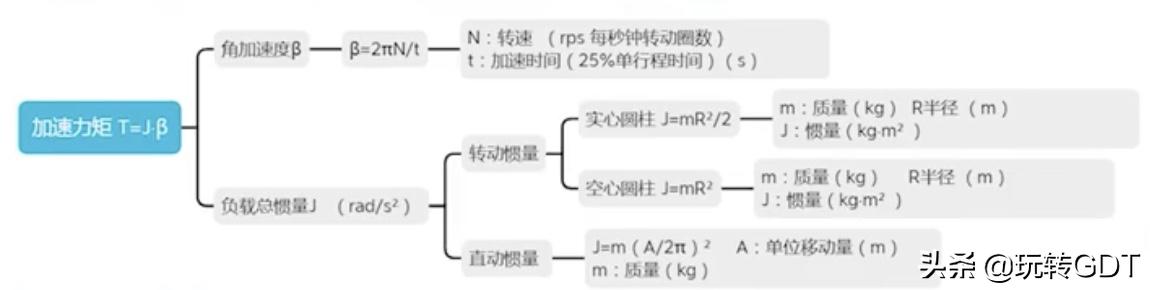
4.要根据加速设定时间,计算负载角加速度。

5.根据结构特性,计算匀速扭矩,注意水平与竖直工况的计算区别。

6.扭矩=惯量*角加速度,计算出加速扭矩。
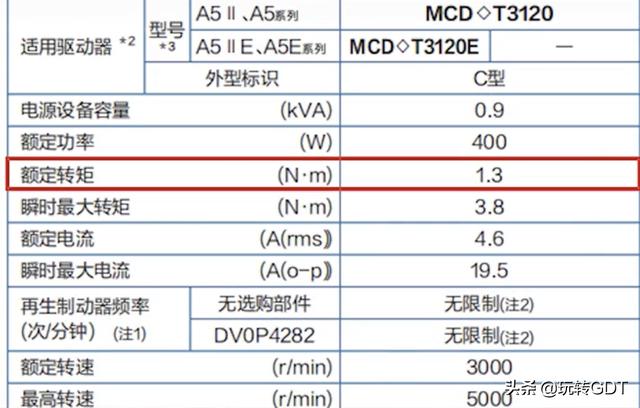
7.根据负载总力矩匹配电机。
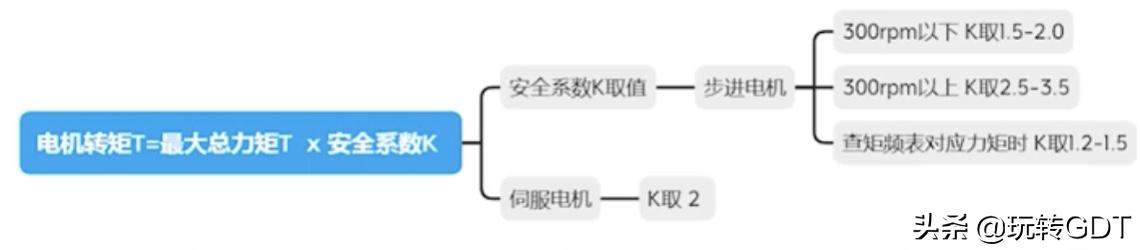
包含功率、扭矩、转速匹配等。
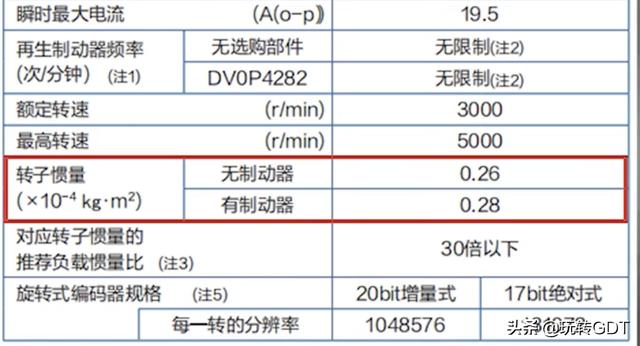
8.计算出惯量比、转速、扭矩。
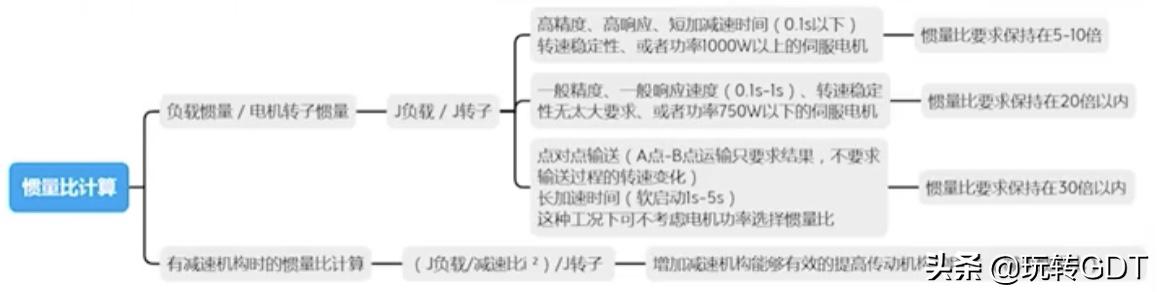
结合结构选择是否加减速机。
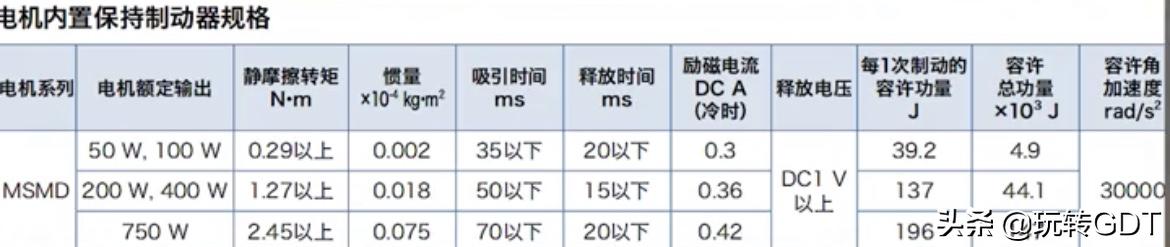
9.根据结构特性选择电机有无抱闸。
10.匹配精度与分辨度,选择合适的编码器种类。

11.选择合适的驱动器。

免责声明:本文来源于网络资料整理,仅供学习分享,严禁用于任何商业用途,后果自负。如涉及作品版权问题,请第一时间联系告知,我们将根据您提供的相关资料进行确认,并及时修改或删除。
好啦,以上就是今天的内容,关注"玩转GDT",每天三分钟,带你了解更多行业知识!

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









