







 本文探讨了针孔摄像机的工作原理,包括如何通过小孔成像避免模糊并提高清晰度。介绍了光圈大小对成像质量的影响,以及如何通过透镜解决光线问题。深入剖析了三维点到二维像面的映射过程,适合了解传统相机技术的基础读者。
本文探讨了针孔摄像机的工作原理,包括如何通过小孔成像避免模糊并提高清晰度。介绍了光圈大小对成像质量的影响,以及如何通过透镜解决光线问题。深入剖析了三维点到二维像面的映射过程,适合了解传统相机技术的基础读者。
目录
1、如何通过相机记录世界?
想法:将胶片直接放置在物体前方。
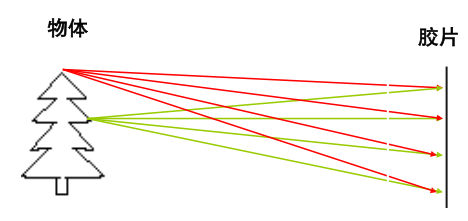
从上面的图可以看出,胶片放在物体前面,让物体和胶片之间没有任何阻拦的时候不能形成像。胶片上的一个点接收到来自物体上的多个点的信息,从这样的图像上,你是看不到任何东西的,看起来就是模糊一团,你也分不清楚这个图像到底记录了啥。
2、针孔摄像机
想法:添加屏障,减少模糊。
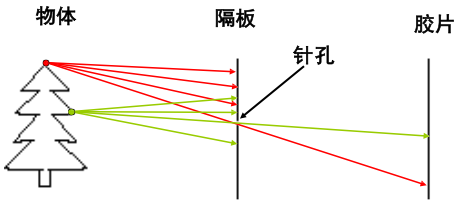
一种最简单的成像方法,就是在这个物体和这个成像平面里面有一个交点,之间加一个一个隔板,隔板中间一个小孔。这个小孔大家可以看到这个物体的光线和它的像点之间呈一对一的关系。这张图像就是一个很简单的小孔成像的基本原理。
3、针孔相机模型
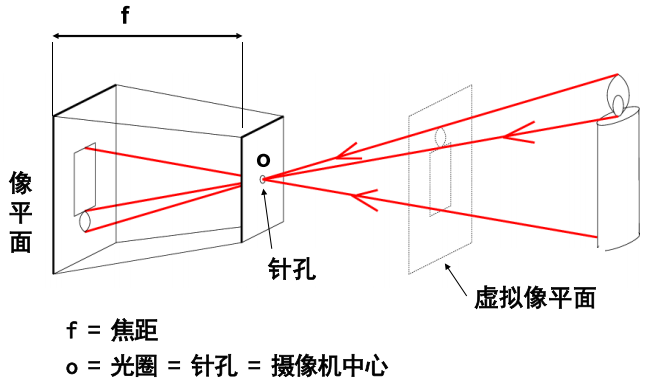
这里面有几个概念,就是这张图里面,中间有一个隔板。这个整个箱体我们可以认为是一个摄像机,最右边是一个三维物体(一个蜡烛)。这个里面有个概念叫做相平面,就是成像上面把三个物体投影到图像面向里面。可以看到三维物体在像平面成了一个相反的像。这个摄像机的这个中心,又叫做光圈或者针孔,或者摄像机中心。
摄像机的这个小孔,光圈o到成像平面的这个距离叫做焦距。物体跟成像结果朝向相反,这个我们计算时会相差一个负号。我们通常不研究这个像平面的事情,我们研究一个叫做虚拟相平面。虚拟像平面跟真实像平面上的东西,如果焦距不是F的话,只是有一个整体的放大,缩小的概念,所以我们很多时候研究虚拟相平面,大家的坐标全是一个方向研究起来方便。所以以后讲这个映射关系的时候,虽然是画在这个图像上,但实际上研究的是虚拟像平面,没有这个正负号的关系,至少在这个方向上。这就是一个针孔摄像机模型。
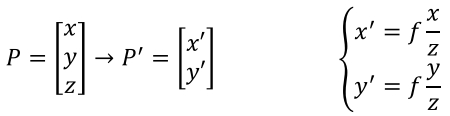
下面是一个数据化的描述,三维点到二维点的映射过程。摄像机坐标系:以相机的中心(光圈)为原点,构建如下图所示的三维坐标系。成像过程就是把相机坐标系下的P点映射至相平面坐标系下的P`点。
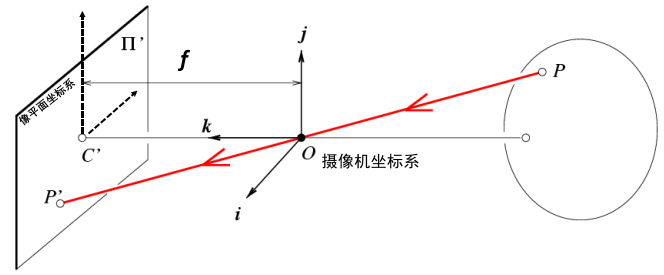
P点到P`点的映射关系如下图,对于o-j-k平面上的投影关系可得:
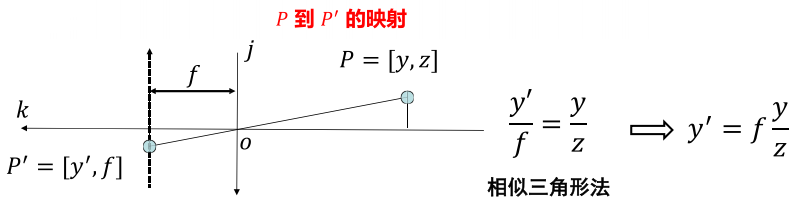
同理,可以得到摄像机坐标系下的三维点P到二维相平面坐标系下的坐标映射关系:
4、针孔相机问题
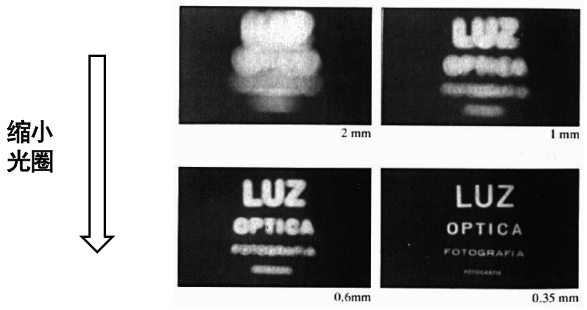
光圈太大时,胶片上同一个点可能会接收到真实世界上不同物体位置上的信息,造成虚像;随着光圈减小,成像效果越来越清晰、越来越暗。
为了看清晰,还要图像够亮。如何应对到达胶片的光线减少呢?答案是:增加透镜。


















 2523
2523

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











