






驱动形式这个问题,其实是见仁见智,并没有绝对的对错。站在不同的需求立场上看待它,会有不同的结果。世事无绝对,没有真正的孰优孰略,只是应用场景不同的情况下哪一种驱动形式更合适罢了。
比如,拉力赛车以及硬派越野车为了更好的抓地力和复杂路面的通过性,就需要采用四驱。场地赛车为了更好的过弯表现以及灵活操控,则采用后驱。而家用车为了提高燃油经济性以及低廉的维护成本,采用前驱就是叫好的解决方案。

在汽车工业迅猛发展的过去40年里,有相当一部分厂商将车辆的驱动形式逐渐前驱化,比较有代表性的是福特、别克这样的美系车企。

不过,凡事都有例外,比如宝马和奔驰,他们所生产的车型,大部分依然采用后驱形式为主。当然,这两家德系豪华1系或A级这样采用前驱的入门车款,同时也有不少车型配备xDrive或4MATIC四驱系统。
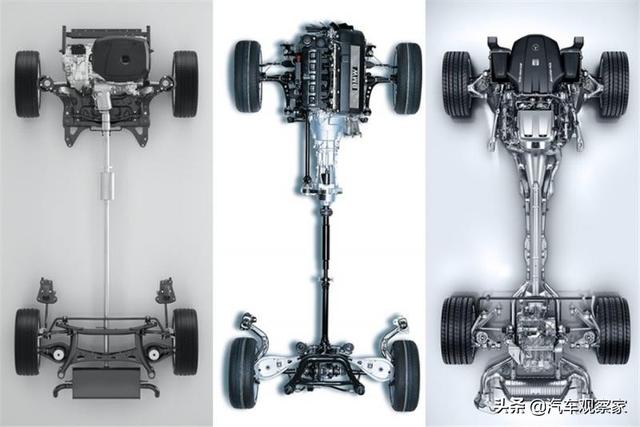
如果你对目前爱车的操控感到满意,那么在更换下一辆时,以现有车辆的数据作为参考会容易的多。具体点说,假如现在开的是前驱车,那么了解了后驱与四驱的优缺点之后,对于换车来说也是很大帮助的。下面,就来讲一讲四驱、后驱以及前驱之间的区别。
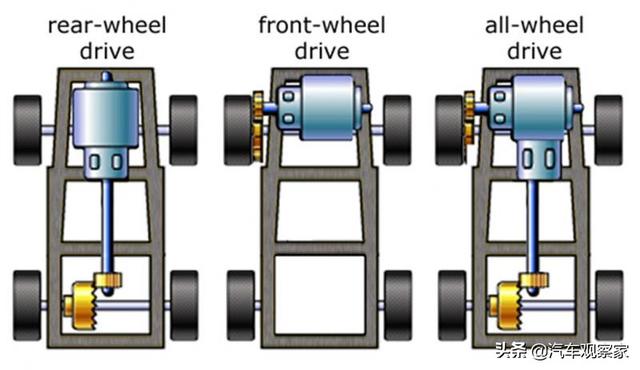
四轮驱动——硬派越野车、SUV、跨界车
按照字面意思理解,四驱车型的发动机带动所有车轮。相比两轮驱动的车型,这种形式可以有效增加车辆的抓地力。大部分SUV以及硬派越野车都采用四驱形式,毕竟这一类车辆所要通过的地形较为复杂,大多为泥泞湿滑又或是凹凸不平这样对抓地力要求极高的非铺装路面。

当然,如果你不喜欢越野,只在城市里通勤,或者仅仅是看中SUV的实用性与高高在上的开阔视野,那么市场上可选的车型也非常多。例如,日产逍客、丰田RAV4或者本田CRV这些车型的入门款,都采用两轮驱动的形式,也更偏向家用。

目前,大多数厂商的普遍做法是将四驱作为选装配置。这其中,最有代表性的非奥迪莫属。如果在一辆奥迪的中网或车尾看到quattro标志,那一定是四驱版本。而有些车型不仅加持了四驱系统,为了提高通过性而将悬挂稍稍调高的A6 Allroad就是最好的例子。

四驱车型可以增加抓地力,同时还能够提高过弯速度。当然,有优点就一定有缺点,四驱系统普遍要比前驱车型的造价更高。同时,由于系统更复杂,车身重量也会有所增加,燃油经济性也就相应降低。

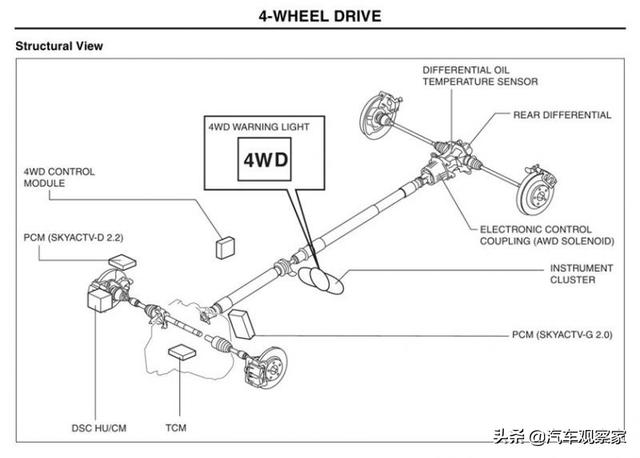
四驱车型有时也会俗称为4×4,而且还有全时四驱、分时四驱以及适时四驱等不同的形式。今天暂时就不在四驱系统上做文章了,有机会单独解释一下各种不同四驱系统的工作方式及差别。
后轮驱动——跑车、豪华轿车

后轮驱动,也就是发动机驱动后轮的形式,几乎所有的性能控都是后驱形式的拥趸。这种形式不像前驱那样,前轮既要负责转向,还要承受发动机的动力输出。后驱的前后轮则可以各司其职,做到术业有专攻。

由于发动机直接驱动后轮,向前“推”的驾驶乐趣要明显多于往前“拉”。而另一个明显优势,则是加速时,由于惯性作用,重量会向车身后方转移,这样会为驱动轮增加不少抓地力。也正因为如此,大多数跑车或大马力车型都采取后驱的形式。比如,大名鼎鼎的梅赛德斯AMG系列。

直到上世纪80年代,几乎所有的车型都是以后驱形式。不过,采用后驱形式的车型也都做了不少妥协。首先,由于前部变速箱与后方发动机需要一根传动轴,我们通常都会看到后排地板中间高高的隆起,大多数后驱车型的内部空间会相对局促,特别是后排中间乘客那无处安放的双脚。
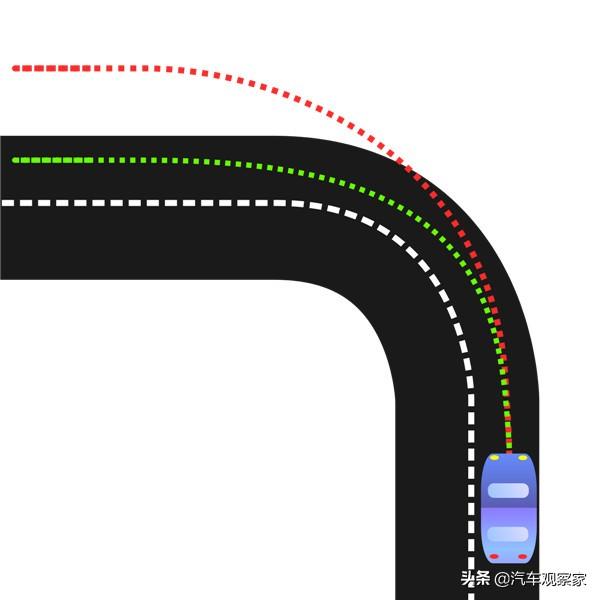
其次,后驱车型也比较容易失控。假如,前驱车以过快的速度过弯,就会出现推头的现象,也就是我们通常所说的转向不足。此时,通过抬油门和加大转向角度的方式就能轻松将车辆救回。
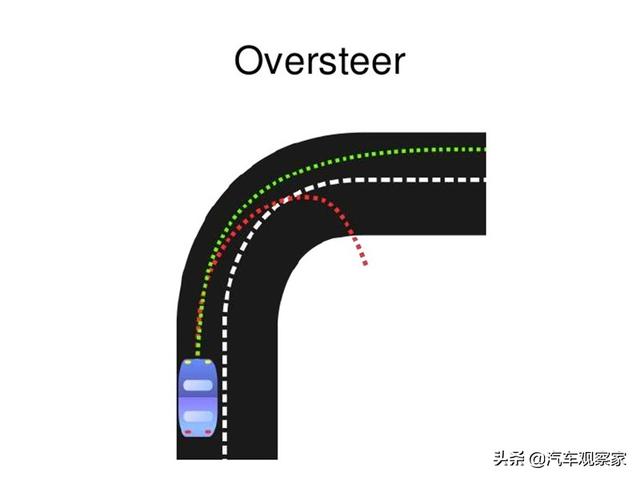
反观后驱车的情况则完全不同,过高的入弯速度会造成甩尾,也就是转向过度。在失去抓地力的瞬间想要将车身姿态修正,就需要更高超的驾驶技巧和经验了。再有就是,在雨雪天气或结冰路面上,后驱车的可控性要明显比前驱或四驱车来得更难。
前轮驱动——家用轿车、入门级SUV、MPV

前轮驱动的流行要追溯到40年前,几乎市面上所有的两厢车都是前驱,当然还有许许多多的紧凑型城市SUV。前驱车易于操控的特性,在上文中已经有提到,转向不足的修正相比转向过度要简单很多。当然,在冰雪路面上,前驱车的抓地力也要比后驱车更好。

由于车身下少了像后驱车那样的巨大传动轴,前驱车的内部空间也要更充裕。不过,许多厂商出于成本控制的考虑,不会将设计之初为四驱车型预留的传动轴位置取消。而是将传动轴取消,保留传动轴凸起的位置而直接改为前驱车。这就是为什么,我们经常在很多前驱SUV上看到后排中间的隆起。

除此之外,由于厂商无需为将发动机动力传输给后轮而额外制造机械部件,相比后驱或四驱车型,前驱车型在价格上的优势显而易见。当然,这样也得到了前驱车重量更轻的结果,燃油经济性也相对更好。

不过,同样的道理,前驱车的缺点也很明显。有相当多的性能控觉得,既控制转向又输出动力,前驱车相比后驱车要少了很多驾驶乐趣,这也是我们常说的转向沟通感差。而之前在上文中提到的,“拉”和“推”两种不同的感受,也是前驱车在操控上的妥协。

最后,前驱车的动力一般不会太大。由于前轮在转向过程中不断改变与地面的角度,抓地力也会随之摇摆不定,这种情况下,前轮负载过大会造成不可控的危险。在过去,前驱车的最大马力都控制在250Ps左右。而随着技术的进步,前驱车的最大马力也被提升到了300Ps左右,比如最具代表性的本田思域Type-R。
结语:
无论你喜欢哪一种,在充分了解了不同驱动形式的优缺点后,对于购车的选择都会有很大帮助。在此,小编也希望你在看过本文后对于自己的需求有了真正的认识。在将来,能够买到适合自己的爱车。
本文为汽车观察家原创,如有抄袭将依法追究法律责任。
(运营人员:PetrolHead)
>>>>>>>>>>>>>>
往期精彩文章回顾:
车子原来是加92的,可以改成加95的么?
过冬之前是否需要提前更换一下玻璃水?
同样金额,加92和95号汽油,哪个能开更远?
车辆刹车时发出异响,是很严重的问题吗?
引起电动汽车自燃的因素有哪些?

















 2174
2174

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









