







 本文介绍了在MotoSimEG-VRC中设置和测试安川机器人摆焊的详细步骤,包括新建弧焊系统、选择机器人型号、插入焊枪模型、创建程序、设置摆焊类型和焊接参数,以及编写焊接指令。通过仿真,展示了单一、三角、L型三种摆焊形式的效果。
本文介绍了在MotoSimEG-VRC中设置和测试安川机器人摆焊的详细步骤,包括新建弧焊系统、选择机器人型号、插入焊枪模型、创建程序、设置摆焊类型和焊接参数,以及编写焊接指令。通过仿真,展示了单一、三角、L型三种摆焊形式的效果。
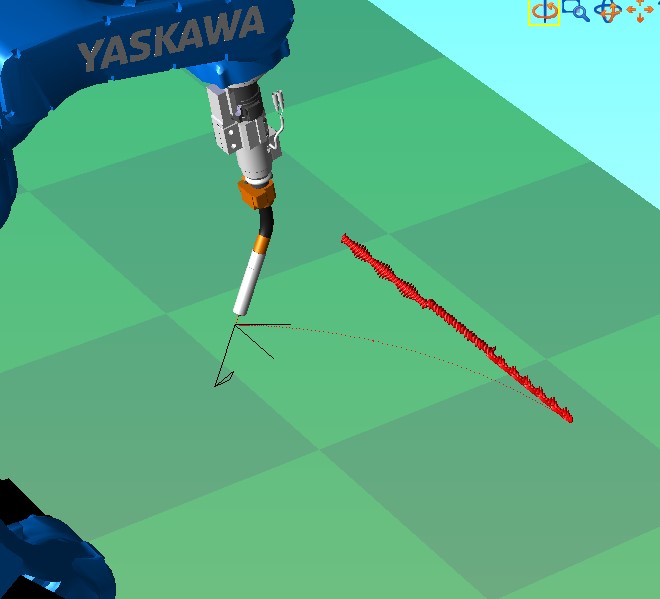
机器人摆焊在实际焊接应用中还是比较多的,安川机器人摆焊有三种形式:单一、三角、L型。下面将在MotoSimEG-VRC安川仿真软件中逐一进行设置测试焊接效果,具体操作步骤如下:
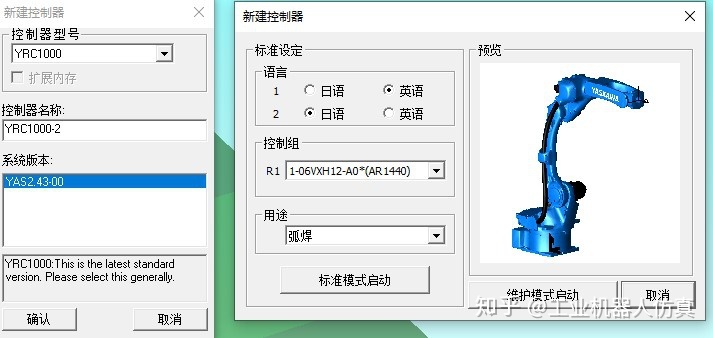
1、新建弧焊机器人系统,选择所需的机器人型号(本例中选择AR1440),直接标准模式启动,完成后放置到合适的位置;
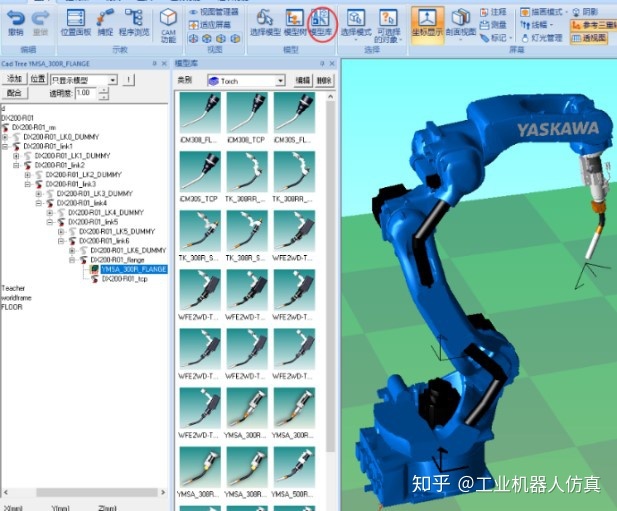
2、弧焊机器人系统创建完成后,从模型库中插入焊枪模型(安装到机器人T轴法兰),也可自己导入模型,支持多种格式(一般以hsf格式导入);
3、新建机器人程式,输入程序名称TEST,如下图所示&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2857
2857

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









