






Linux系统我选择Ubuntu 18.04,为了显示RViz图形界面,需要在Windows端安装X Server程序,可选的软件有VcXsrv、Xming、MobaXterm。
网上可以找到一篇安装成功的教程,作者用的是VcXsrv。我习惯用MobaXterm。
Running ROS on Windows 10janbernloehr.de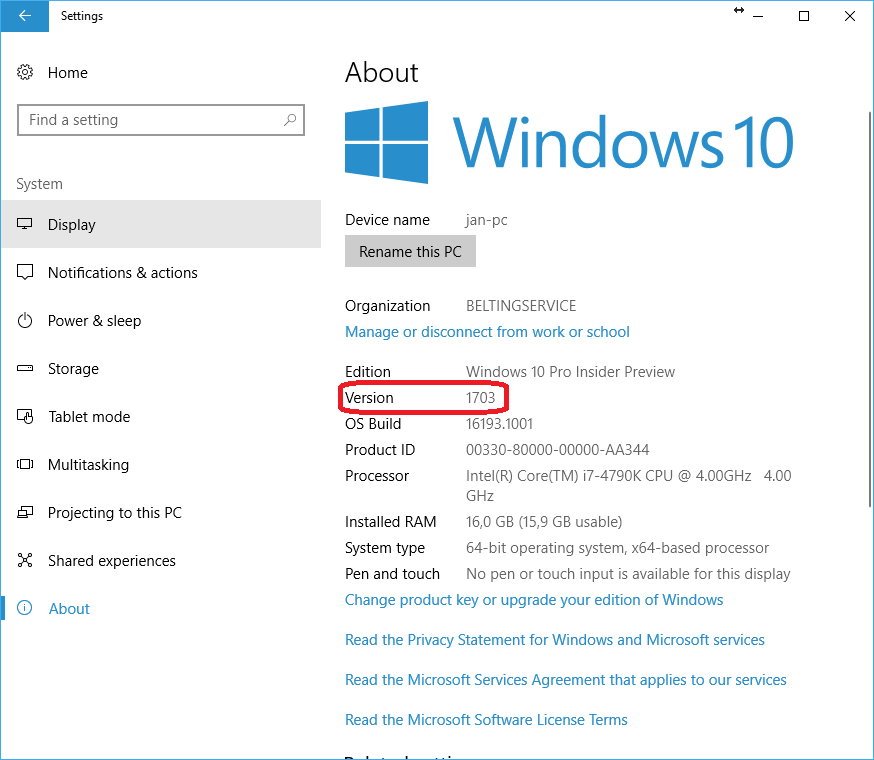
安装WSL
WSL的安装网上教程很多,不再赘述,也可以参考上面这篇文章。Linux系统我选择Ubuntu 18.04,其他系统未测试。
Windows端安装MobaXterm,安装后会自动检测到本机上的WSL系统。
用MobaXterm登录WSL-Ubuntu,安装以下程序
$ sudo apt install x11-apps运行
$ xeyes可以看到一对眼睛,说明X Server工作正常。
安装ROS
按官网安装指南操作
http://wiki.ros.org/melodic/Installation/Ubuntuwiki.ros.org安装后跑一下海龟的测试
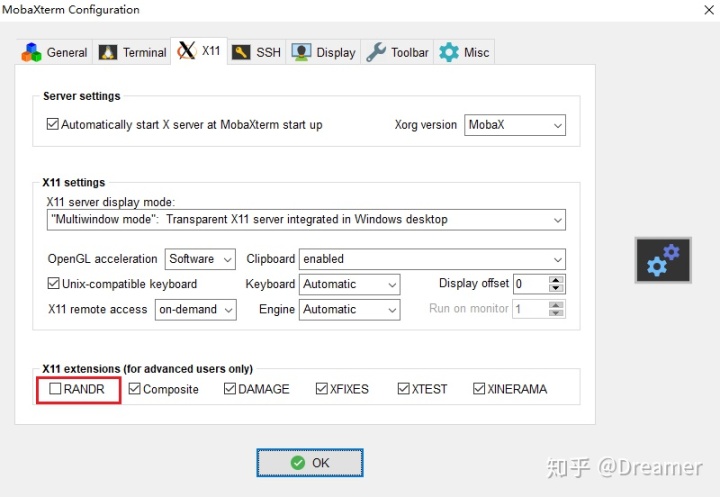
http://wiki.ros.org/ROS/Tutorials/UnderstandingNodeswiki.ros.org出现一个报错,但海龟的图形界面可以正常显示,影响不大。出错信息如下:
QXcbConnection: XCB error: 145 (Unknown), sequence: 171, resource id: 0查了一下,这个出错信息跟MobaXterm的设置有关,点击setting -> X11,取消RANDR的勾选即可解决。
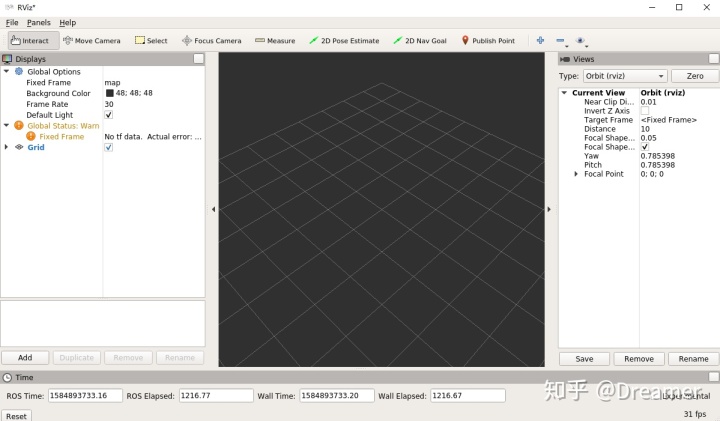
然后启动RViz试试
$ rosrun rviz rvizRViz的图标一闪而过,启动失败。终端里出现错误信息:
Segmentation fault (core dumped)查了很多博客和论坛,最后在下面这个讨论里找到解决方法
https://github.com/ros-visualization/rviz/issues/1438github.com需要将LIBGL_ALWAYS_INDIRECT这个环境变量置空:
$ export LIBGL_ALWAYS_INDIRECT=就能正常启动RViz了。
回头再看第一个链接那篇教程,那位作者也提到有人推荐把LIBGL_ALWAYS_INDIRECT设为1,但他实验发现这么操作会出错。可能在Ubuntu 18.04里这个环境变量默认是1,需要改过来才行。
网上讨论的RViz出现Segmentation fault有很多其他不同原因,本文的方法不具备通用性,更多解决方法可参考官方文档。
rviz/Troubleshooting - ROS Wikiwiki.ros.org补充一下MobaXterm和VcXsrv的区别
MobaXterm本身是一个终端,集成了SSH、FTP、X11 server等诸多功能,更类似于Xmanager。而VcXsrv就只是一个X Server。
MobaXterm的终端字体和配色比WSL的默认终端更加舒服,但MobaXterm只能在它自己的终端里敲指令才能在弹出图形界面。而VcXsrv本身是不带终端的,它运行之后,我们可以在其他终端里输入指令启动图形程序。用VScode搭配WSL进行远程调试,使用VcXsrv会更加方便。















 1417
1417

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









