







ros下gazebo的启动及models下载安装 gazebo的启动的黑屏处理
ros下gazebo的启动及models下载安装 gazebo的启动的黑屏处理
我在安装好gazebo之后,首先是启动,有多种方法进行启动
方法1:
键盘输入Ctrl+Alt+T 进入终端,输入roscore
接下来,键盘输入Ctrl+Shift+T,在终端中新建一个窗口,接下来输入:rosrun gazebo_ros gazebo
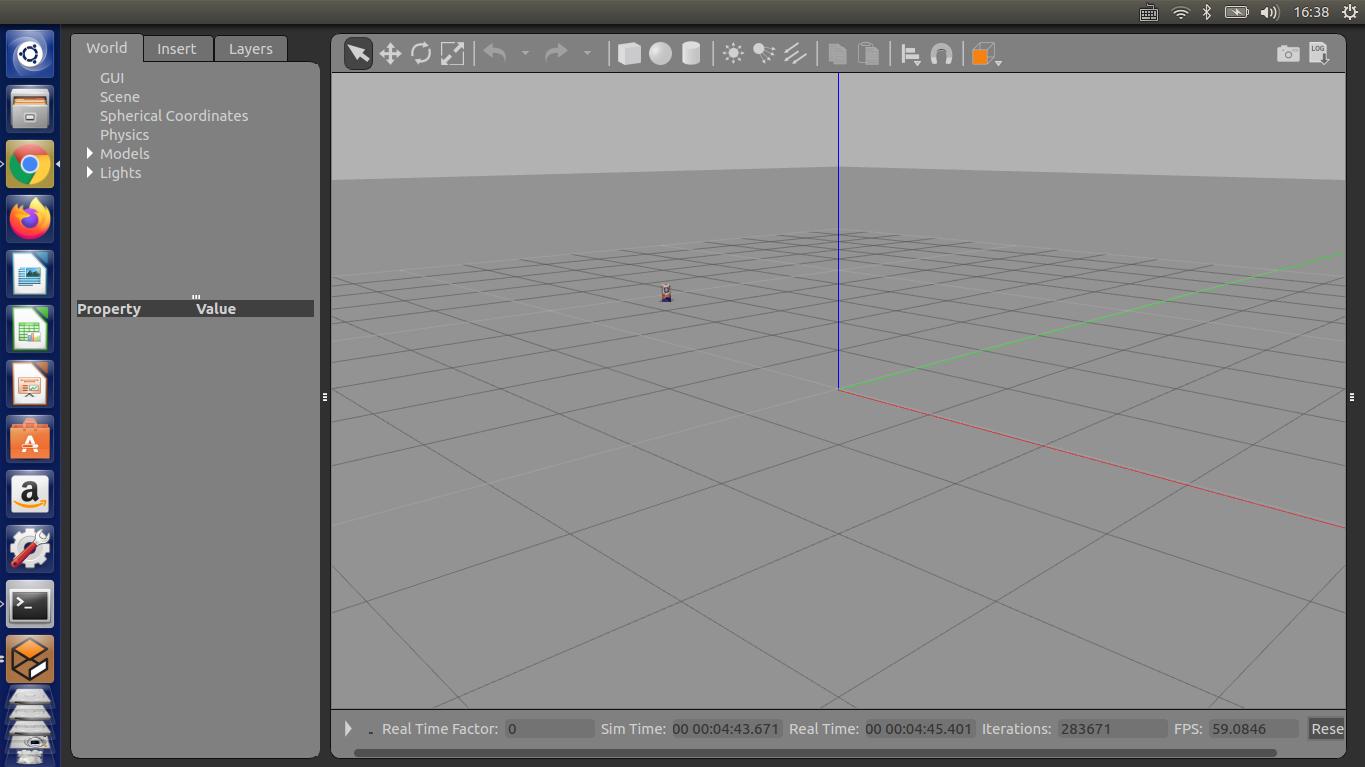
顺利的话,你可以看到这样的东西:
方法2:
使用roslaunch打开world模型
roslaunch是一个启动ROS节点并插入机器人模型的标准方法.要建立一个空的world模型,我们只需
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2912
2912











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









