







- 问:什么情况下需要从单应性矩阵恢复两个相机之间的姿态参数R和T呢?
- 答:相机发生纯旋转或特征点共面
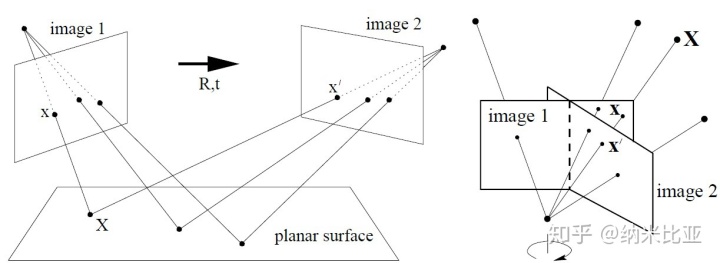
- H矩阵表示两幅图像之间的映射关系
- 问: 怎么求
// Estimate homography between two planes
cv::Mat H, inliers;
H = cv::findHomography(pointframe1, pointframe2, cv::RANSAC, 3.0, inliers);-
- 相似变换
: 旋转、平移、缩放
- 仿射变换
- 射影变换
-
-
矩阵为
矩阵,8个自由度
-
- Faugeras SVD-based decomposition(orb_slam)
- Zhang SVD-based decomposition
- Analytical decomposition(opencv)
- 详解 Faugeras SVD-based decomposition 如何 ?
- 结果:共8组可能的解
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1292
1292











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









