




1. 研究背景
随着城市化进程加快和居民生活水平提高,生活垃圾产量急剧增加,垃圾分类成为提升资源回收利用率、减少环境污染的关键环节。传统垃圾分类依赖人工识别,存在效率低、主观性强、分类标准不统一等问题。
近年来,深度学习技术在图像识别领域取得突破性进展,为垃圾分类自动化提供了可能。ResNet(残差网络)作为深度卷积神经网络的典型代表,凭借其解决深层网络梯度消失问题的独特设计,在图像分类任务中表现优异,成为垃圾分类系统的理想技术选择。
2. 研究目的
本系统旨在通过 ResNet 图像识别模型实现生活垃圾的自动分类,具体目标包括:
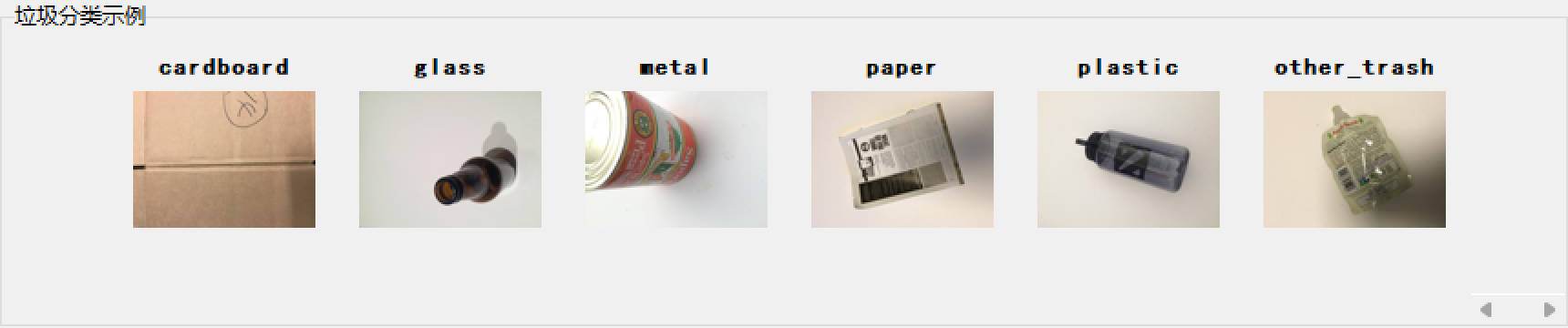
- 实现六大类垃圾的精准识别: cardboard(纸板)、glass(玻璃)、metal(金属)、paper(纸张)、plastic(塑料)、other_trash(其他垃圾)
- 提供高效的单张图像识别功能,支持常见图像格式(jpg、jpeg、png、bmp)的快速分类
- 支持批量图像处理,满足大量垃圾图像的批量分类需求,并生成结构化结果报告
- 构建用户友好的可视化界面,降低垃圾分类技术的使用门槛
- 实现模型的自主训练功能,支持用户根据实际需求优化模型性能
- 达到较高的分类准确率(目标验证集准确率 > 85%),满足实际应用场景需求
六大类垃圾的图片是从TrashNet垃圾分类数据集中收集,这是一个专门为垃圾分类任务设计的数据集,可通过以下链接访问:
TrashNet垃圾分类数据集链接
六大类垃圾的示例图片如下所示:
3. 技术方案
3.1 核心技术栈
- PyTorch 深度学习框架:提供模型构建、训练和推理的完整生态支持,支持 GPU 加速计算,提升模型训练和预测效率。
- PIL(Pillow)和torchvision 图像处理库:实现图像加载、格式转换、预处理等功能;提供丰富的图像变换工具(裁剪、旋转、归一化等)。
- Tkinter 用户界面框架:构建跨平台的图形用户界面,实现图像预览、结果展示、进度跟踪等交互功能。
- Matplotlib 可视化工具:绘制训练过程中的损失和准确率曲线,辅助分析模型训练效果。
3.2 ResNet 核心运行机制
ResNet(残差网络)的核心创新是引入残差块(Residual Block)结构,解决了深层神经网络训练中的梯度消失问题:
一、残差连接设计
每个残差块包含主路径(卷积操作)和跳跃连接(恒等映射或 1×1 卷积调整维度),输出为两者之和:H(x) = F(x) + x,其中 F (x) 为主路径变换,x 为输入的恒等映射。
二、深度网络构建
系统采用 ResNet50 架构,包含 49 个卷积层和 1 个全连接层,通过堆叠残差块实现深度网络结构。
三、迁移学习应用
- 优先加载本地预训练模型权重,若无则使用 PyTorch 提供的预训练 ResNet50 权重;
- 冻结大部分网络参数(仅保留最后 10 层可训练),降低训练成本;
- 替换最后一层全连接层,适配 6 类垃圾的分类任务。
四、特征提取流程
- 输入图像通过卷积层和池化层逐步提取低级特征(边缘、纹理)到高级特征(形状、语义);
- 最终通过全连接层输出分类概率分布,实现垃圾类别的预测。
4. 实现流程
4.1 数据准备阶段
- 定义数据集目录结构,按类别组织图像数据
- 实现数据预处理管道,包括训练集增强(随机裁剪、翻转、旋转等)和验证集标准化
- 按 8:2 比例随机划分训练集和验证集
4.2 模型构建阶段
- 初始化 ResNet50 基础架构
- 加载本地预训练模型或官方预训练权重
- 冻结部分参数,修改输出层适配垃圾分类任务
- 将模型部署到 GPU(优先)或 CPU 设备
该阶段的核心代码如下所示:
def build_model(num_classes):
"""构建分类模型,自动检测并使用本地ResNet50模型或预训练模型"""
# 创建基础模型架构
model = models.resnet50(pretrained=False) # 先不加载预训练权重
# 检查本地是否存在ResNet50模型文件
if os.path.exists(config.local_resnet_path):
try:
# 加载本地ResNet50模型权重
resnet_weights = torch.load(config.local_resnet_path, map_location=config.device)
model.load_state_dict(resnet_weights)
print(f"成功加载本地ResNet50模型: {config.local_resnet_path}")
return_message = f"使用本地ResNet50模型: {config.local_resnet_path}"
except Exception as e:
print(f"加载本地ResNet50模型失败: {str(e)},将使用预训练模型")
model = models.resnet50(pretrained=True)
return_message = f"本地模型加载失败,使用预训练ResNet50模型: {str(e)}"
else:
# 本地模型不存在,使用预训练的ResNet50权重
model = models.resnet50(pretrained=True)
print(f"本地ResNet50模型不存在({config.local_resnet_path}),使用预训练模型")
return_message = f"本地ResNet50模型不存在,使用预训练模型"
# 冻结大部分参数
for param in list(model.parameters())[:-10]:
param.requires_grad = False
# 替换最后一层以适应我们的分类任务
num_ftrs = model.fc.in_features
model.fc = nn.Linear(num_ftrs, num_classes)
# 移动模型到适当的设备
model = model.to(config.device)
return model, return_message4.3 模型训练阶段
- 使用交叉熵损失函数计算分类损失
- 采用 Adam 优化器更新可训练参数
- 迭代训练10 个 epochs,跟踪训练集和验证集的损失与准确率
- 保存验证集准确率最高的模型权重
点击“训练模型”按钮后,等进度条走完,训练过程就结束了,如下图所示:

模型训练阶段,只需等待,其核心源代码如下所示:
# 5. 训练和评估函数
def train_model(model, train_loader, val_loader, criterion, optimizer, epochs, progress_callback=None):
"""训练模型"""
best_acc = 0.0
train_losses = []
val_losses = []
train_accs = []
val_accs = []
for epoch in range(epochs):
print(f'Epoch {epoch + 1}/{epochs}')
print('-' * 10)
# 训练阶段
model.train()
running_loss = 0.0
running_corrects = 0
for inputs, labels in train_loader:
inputs = inputs.to(config.device)
labels = labels.to(config.device)
# 清零梯度
optimizer.zero_grad()
# 前向传播
outputs = model(inputs)
_, preds = torch.max(outputs, 1)
loss = criterion(outputs, labels)
# 反向传播和优化
loss.backward()
optimizer.step()
# 统计
running_loss += loss.item() * inputs.size(0)
running_corrects += torch.sum(preds == labels.data)
epoch_loss = running_loss / len(train_loader.dataset)
epoch_acc = running_corrects.double() / len(train_loader.dataset)
train_losses.append(epoch_loss)
train_accs.append(epoch_acc.item())
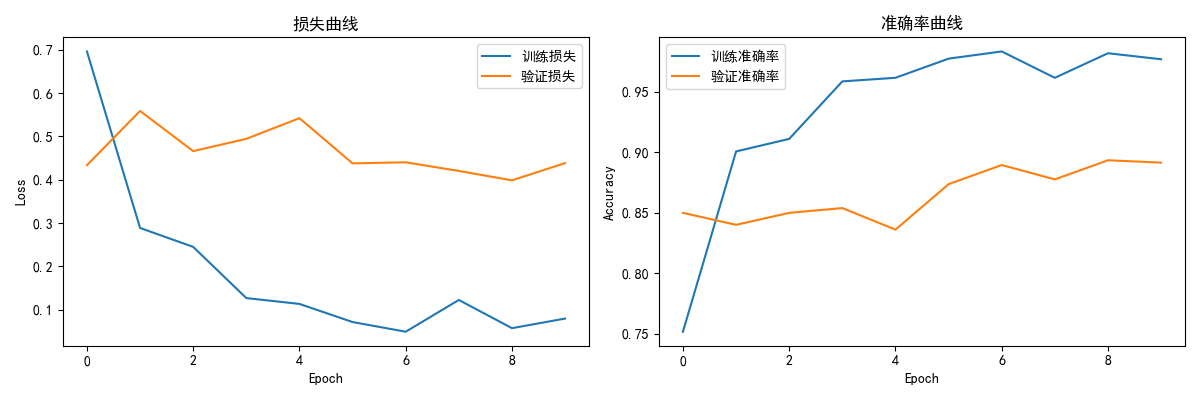
print(f'Train Loss: {epoch_loss:.4f} Acc: {epoch_acc:.4f}')训练结束后,训练损失和准确率指标会保存在本地training_curves.png中,如下图所示:
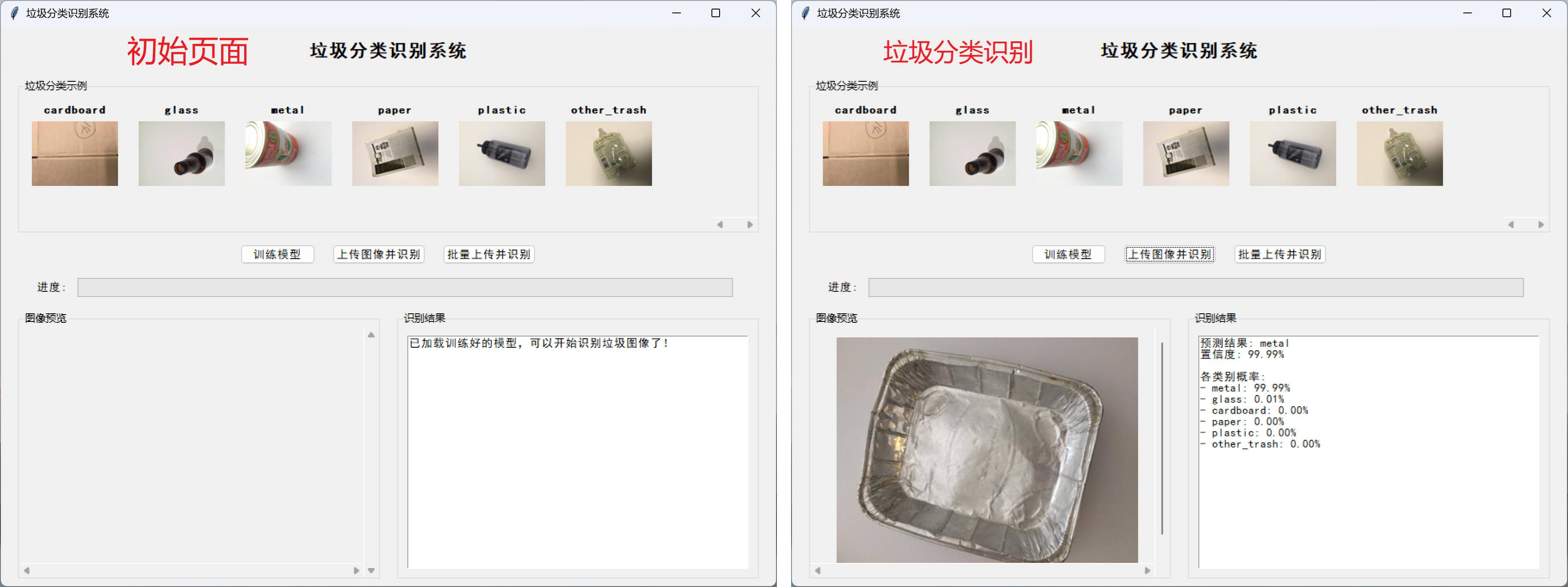
4.4 推理应用阶段
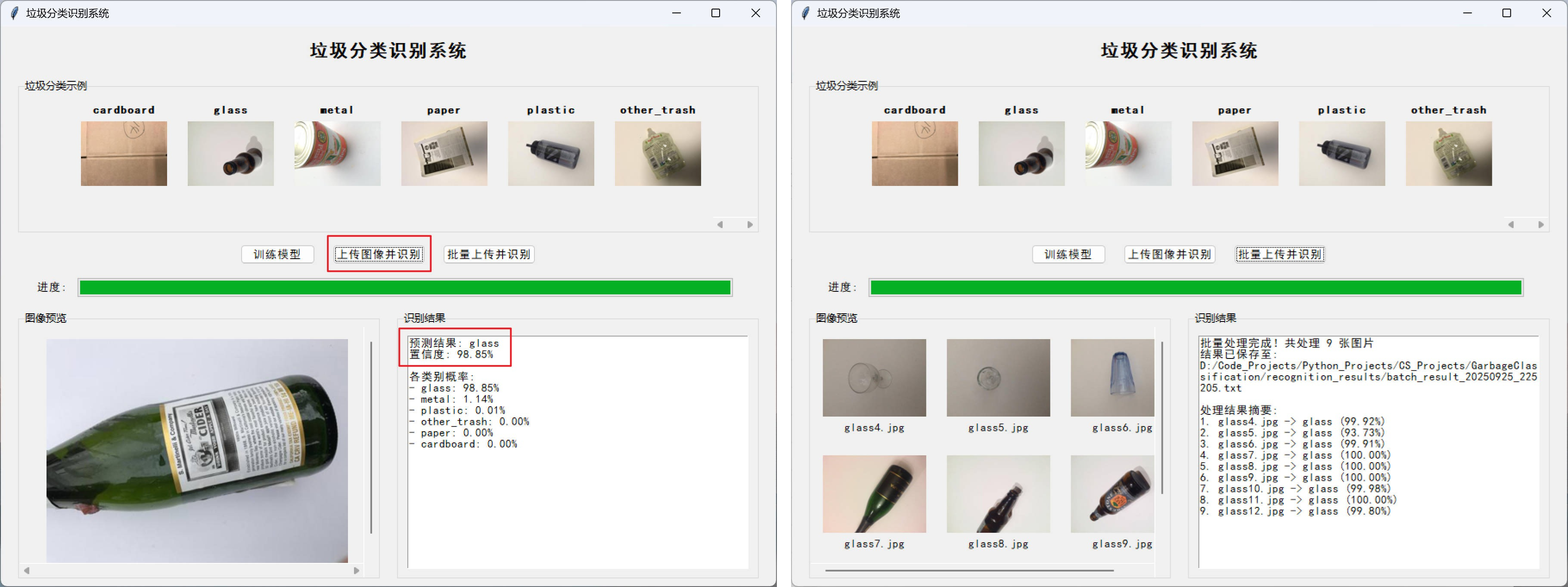
- 实现单张图像预测功能,输出类别、置信度及各类别概率分布
- 支持批量图像处理,生成包含路径、类别和置信度的结果文件
- 通过 GUI 展示预测结果和图像预览
其中,单张图片、多张图片的垃圾分类结果如下图所示:
4.5 界面交互阶段
- 提供模型训练、单张识别、批量识别等功能入口
- 显示训练进度和分类进度
- 可视化展示各类垃圾示例图像
5. 总结
本系统基于 ResNet50 图像识别模型构建了一套完整的垃圾分类解决方案,通过深度学习技术实现了生活垃圾的自动分类。系统整合了数据预处理、模型训练、图像识别和结果展示等功能,提供了友好的用户界面,降低了垃圾分类技术的使用门槛。
通过迁移学习策略,系统有效利用了预训练模型的特征提取能力,在减少训练数据需求的同时保证了分类精度。批量处理功能和结果保存功能增强了系统的实用性,使其能够适应实际应用场景中的批量处理需求。
未来可通过扩大数据集规模、优化网络结构、引入注意力机制等方式进一步提升分类准确率,拓展更多垃圾类别,增强系统的实际应用价值。
最后,还上传个该项目的简要演示视频,供大家了解。
手把手教你实现垃圾分类系统


















 9408
9408

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











