







文章目录
论文: https://arxiv.org/pdf/1502.03167.pdf
Batch Normalization
对模型的初始输入进行归一化处理,可以提高模型训练收敛的速度;对神经网络内层的数据进行归一化处理,同样也可以达到加速训练的效果。Batch Normalization 就是归一化的一个重要方法。以下将介绍BN是如何归一化数据,能起到什么样的效果以及产生该效果的原因展开介绍。
1. Batch Normalization原理
(一)前向传播
在训练阶段:
(1)对于输入的mini-batch数据
B
=
{
x
1
…
m
}
\mathcal{B}=\left\{x_{1 \ldots m}\right\}
B={x1…m},假设shape为(m, C, H, W),计算其在Channel维度上的均值和方差:
μ
B
=
1
m
∑
i
=
1
m
x
i
σ
B
2
=
1
m
∑
i
=
1
m
(
x
i
−
μ
B
)
2
\begin{aligned} \mu_{\mathcal{B}} &= \frac{1}{m} \sum_{i=1}^{m} x_{i}\\ \sigma_{\mathcal{B}}^{2} &= \frac{1}{m} \sum_{i=1}^{m}\left(x_{i}-\mu_{\mathcal{B}}\right)^{2} \end{aligned}
μBσB2=m1i=1∑mxi=m1i=1∑m(xi−μB)2
(2)根据计算出来的均值和方差,归一化mini-Batch中每一个样本:
x
^
i
=
x
i
−
μ
B
σ
B
2
+
ϵ
\widehat{x}_{i} = \frac{x_{i}-\mu_{\mathcal{B}}}{\sqrt{\sigma_{\mathcal{B}}^{2}+\epsilon}}
x
i=σB2+ϵxi−μB
(3)最后,对归一化后的数据进行一次平移+缩放变换:
y
i
=
γ
x
^
i
+
β
≡
B
N
γ
,
β
(
x
i
)
y_{i} = \gamma \widehat{x}_{i}+\beta \equiv \mathrm{B} \mathrm{N}_{\gamma, \beta}\left(x_{i}\right)
yi=γx
i+β≡BNγ,β(xi)
γ
、
β
\gamma、\beta
γ、β是需要学习的参数。
在测试阶段:
使用训练集中数据的
μ
B
\mu_{\mathcal{B}}
μB和
σ
B
2
\sigma_{\mathcal{B}}^{2}
σB2无偏估计作为测试数据归一化变换的均值和方差:
E
(
x
)
=
E
B
(
μ
B
)
Var
(
x
)
=
m
m
−
1
E
B
(
σ
B
2
)
\begin{array}{l}{E(x)=E_{\mathcal{B}}\left(\mu_{\mathcal{B}}\right)} \\ {\operatorname{Var}(x)=\frac{m}{m-1} E_{\mathcal{B}}\left(\sigma_{\mathcal{B}}^{2}\right)}\end{array}
E(x)=EB(μB)Var(x)=m−1mEB(σB2)
通过记录训练时每一个mini-batch的均值和方差最后取均值得到。
而在实际运用中,常动态均值和动态方差,通过一个动量参数维护:
r
μ
B
t
=
β
r
μ
B
t
−
1
+
(
1
−
β
)
μ
B
r
σ
B
t
2
=
β
r
σ
B
t
−
1
2
+
(
1
−
β
)
σ
B
2
\begin{aligned} r \mu_{B_t} &=\beta r \mu_{B_{t-1}}+(1-\beta) \mu_{\mathcal{B}} \\ r \sigma_{B_t}^{2} &=\beta r \sigma_{B_{t-1}}^{2}+(1-\beta) \sigma_{\mathcal{B}}^{2} \end{aligned}
rμBtrσBt2=βrμBt−1+(1−β)μB=βrσBt−12+(1−β)σB2
β
\beta
β一般取0.9.
因此可以得到测试阶段的变换为:
y
=
γ
x
−
E
(
x
)
V
a
r
(
x
)
+
ϵ
+
β
y = \gamma \frac{x-E(x)}{\sqrt{Var(x)+\epsilon}} + \beta
y=γVar(x)+ϵx−E(x)+β
或:
y
=
γ
x
−
r
μ
B
t
r
σ
B
t
−
1
2
+
ϵ
+
β
y = \gamma \frac{x-r \mu_{B_t}}{\sqrt{r \sigma_{B_{t-1}}^{2}+\epsilon}} + \beta
y=γrσBt−12+ϵx−rμBt+β
(二)反向传播(梯度计算)
计算梯度最好的方法是根据前向传播的推导公式,构造出计算图,直观反映变量间的依赖关系。
前向传播公式:
μ
B
=
1
m
∑
i
=
1
m
x
i
σ
B
2
=
1
m
∑
i
=
1
m
(
x
i
−
μ
B
)
2
x
^
i
=
x
i
−
μ
B
σ
B
2
+
ϵ
y
i
=
γ
x
^
i
+
β
\begin{aligned} \mu_{\mathcal{B}} &= \frac{1}{m} \sum_{i=1}^{m} x_{i}\\ \sigma_{\mathcal{B}}^{2} &= \frac{1}{m} \sum_{i=1}^{m}\left(x_{i}-\mu_{\mathcal{B}}\right)^{2}\\ \widehat{x}_{i} &= \frac{x_{i}-\mu_{\mathcal{B}}}{\sqrt{\sigma_{\mathcal{B}}^{2}+\epsilon}}\\ y_{i} &= \gamma \widehat{x}_{i}+\beta \end{aligned}
μBσB2x
iyi=m1i=1∑mxi=m1i=1∑m(xi−μB)2=σB2+ϵxi−μB=γx
i+β
计算图:
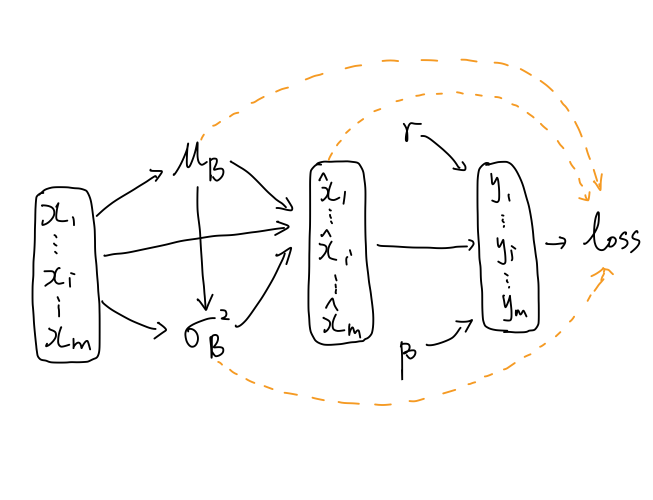
黑色线表示前向传播的关系,橙色线表示反向传播的关系
利用计算图计算梯度的套路:
- 先计算离已知梯度近的变量的梯度,这样在计算远一点变量的梯度时,可能可以直接利用已经计算好的梯度;
- 一个变量有几个出边(向外延伸的边),其梯度就由几项相加。
当前已知
∂
l
∂
y
i
\frac{\partial l}{\partial y_{i}}
∂yi∂l,要计算loss对图中每一个变量的梯度.
按照由近及远的方法,依次算
γ
,
β
,
x
i
^
\gamma,\beta,\hat{x_i}
γ,β,xi^.由于
σ
B
2
\sigma_{\mathcal{B}}^2
σB2依赖于
μ
B
\mu_{\mathcal{B}}
μB,所以先计算
σ
B
2
\sigma_{\mathcal{B}}^2
σB2,再计算
μ
B
\mu_{\mathcal{B}}
μB,最后计算$x_i
$
γ
\gamma
γ:表面一个出边,实际上有m个出边,因为每一个
y
i
y_i
yi的计算都与
γ
\gamma
γ有关,因此
∂
l
∂
γ
=
∑
i
=
1
m
∂
l
∂
y
i
∂
y
i
∂
γ
=
∑
i
=
1
m
∂
l
∂
y
i
x
i
^
\begin{aligned} \frac{\partial l}{\partial \gamma} &= \sum_{i=1}^m \frac{\partial l}{\partial y_i}\frac{\partial y_i}{\partial \gamma}\\ &= \sum_{i=1}^m \frac{\partial l}{\partial y_i} \hat{x_i} \end{aligned}
∂γ∂l=i=1∑m∂yi∂l∂γ∂yi=i=1∑m∂yi∂lxi^
β
\beta
β:同理
∂
l
∂
β
=
∑
i
=
1
m
∂
l
∂
y
i
∂
y
i
∂
β
=
∑
i
=
1
m
∂
l
∂
y
i
\begin{aligned} \frac{\partial l}{\partial \beta} &= \sum_{i=1}^m \frac{\partial l}{\partial y_i} \frac{\partial y_i}{\partial \beta}\\ &= \sum_{i=1}^m \frac{\partial l}{\partial y_i} \end{aligned}
∂β∂l=i=1∑m∂yi∂l∂β∂yi=i=1∑m∂yi∂l
x
i
^
\hat{x_i}
xi^:一条出边
∂
l
∂
x
i
^
=
∂
l
∂
y
i
∂
y
i
∂
x
i
^
=
∂
l
∂
y
i
γ
\begin{aligned} \frac{\partial l}{\partial \hat{x_i}} & =\frac{\partial l}{\partial y_i}\frac{\partial y_i}{\partial \hat{x_i}}\\ & =\frac{\partial l}{\partial y_i}\gamma \end{aligned}
∂xi^∂l=∂yi∂l∂xi^∂yi=∂yi∂lγ
σ
B
2
\sigma_{\mathcal{B}}^2
σB2:m条出边,每一个
x
i
^
\hat{x_i}
xi^的计算都依赖于
σ
B
2
\sigma_{\mathcal{B}}^2
σB2.找到其到loss的路径:
σ
B
2
→
x
i
^
→
y
i
→
l
o
s
s
\sigma_{\mathcal{B}}^2\rightarrow\hat{x_i}\rightarrow y_i \rightarrow loss
σB2→xi^→yi→loss,由于
x
i
^
\hat{x_i}
xi^关于loss的梯度已经计算好了,所以路径为
σ
B
2
→
x
i
^
→
l
o
s
s
\sigma_{\mathcal{B}}^2\rightarrow\hat{x_i} \rightarrow loss
σB2→xi^→loss,因此
∂
l
∂
σ
B
2
=
∑
i
=
1
m
∂
l
∂
x
i
^
x
i
^
σ
B
2
=
∑
i
=
1
m
∂
l
∂
x
i
^
−
1
2
(
x
i
−
μ
B
)
(
σ
B
2
+
ϵ
)
−
3
2
\begin{aligned} \frac{\partial l}{\partial \sigma_{\mathcal{B}}^2} &= \sum_{i=1}^m \frac{\partial l}{\partial \hat{x_i}}\frac{\hat{x_i}}{\sigma_{\mathcal{B}}^2}\\ &= \sum_{i=1}^m \frac{\partial l}{\partial \hat{x_i}} \frac{-1}{2}(x_i-\mu_{\mathcal{B}})(\sigma_{\mathcal{B}}^2+\epsilon)^{-\frac{3}{2}} \end{aligned}
∂σB2∂l=i=1∑m∂xi^∂lσB2xi^=i=1∑m∂xi^∂l2−1(xi−μB)(σB2+ϵ)−23
μ
B
\mu_{\mathcal{B}}
μB出边有m + 1条.路径:
μ
B
→
σ
B
2
→
l
o
s
s
\mu_{\mathcal{B}} \rightarrow \sigma_{\mathcal{B}}^2 \rightarrow loss
μB→σB2→loss,
μ
B
→
x
i
^
→
l
o
s
s
\mu_{\mathcal{B}} \rightarrow \hat{x_i} \rightarrow loss
μB→xi^→loss,因此;
∂
l
∂
μ
B
=
∂
l
∂
σ
B
2
σ
B
2
∂
μ
B
+
∑
i
=
1
m
∂
l
∂
x
i
^
∂
x
i
^
∂
μ
B
=
∂
l
∂
σ
B
2
−
2
m
∑
i
=
1
m
(
x
i
−
μ
B
)
+
∑
i
=
1
m
∂
l
∂
x
i
^
(
−
1
σ
B
2
+
ϵ
)
\begin{aligned} \frac{\partial l}{\partial \mu_{\mathcal{B}}} &=\frac{\partial l}{\partial \sigma_{\mathcal{B}}^2}\frac{\sigma_{\mathcal{B}}^2}{\partial \mu_{\mathcal{B}}} + \sum_{i=1}^m\frac{\partial l}{\partial \hat{x_i}}\frac{\partial \hat{x_i}}{\partial \mu_{\mathcal{B}}}\\ &=\frac{\partial l}{\partial \sigma_{\mathcal{B}}^2} \frac{-2}{m}\sum_{i=1}^m(x_i-\mu_{\mathcal{B}}) + \sum_{i=1}^m\frac{\partial l}{\partial \hat{x_i}} (\frac{-1}{\sqrt{\sigma_{\mathcal{B}}^2+\epsilon}})\\ \end{aligned}
∂μB∂l=∂σB2∂l∂μBσB2+i=1∑m∂xi^∂l∂μB∂xi^=∂σB2∂lm−2i=1∑m(xi−μB)+i=1∑m∂xi^∂l(σB2+ϵ−1)
x
i
x_i
xi:有3条边,路径:
x
i
→
μ
B
→
l
o
s
s
x_i\rightarrow\mu_{\mathcal{B}}\rightarrow loss
xi→μB→loss,
x
i
→
σ
B
2
→
l
o
s
s
x_i\rightarrow \sigma_{\mathcal{B}}^2\rightarrow loss
xi→σB2→loss,
x
i
→
x
i
^
→
l
o
s
s
x_i\rightarrow \hat{x_i}\rightarrow loss
xi→xi^→loss
∂
l
∂
x
i
=
∂
l
∂
μ
B
∂
μ
B
∂
x
i
+
∂
l
σ
B
2
σ
B
2
∂
x
i
+
∂
l
x
^
i
x
^
i
∂
x
i
=
∂
l
∂
μ
B
1
m
+
∂
l
∂
σ
B
2
−
2
m
(
x
i
−
μ
B
)
+
∂
l
∂
x
^
i
1
σ
B
2
+
ϵ
\begin{aligned} \frac{\partial l}{\partial x_{i}} &=\frac{\partial l}{\partial \mu_{\mathcal{B}}} \frac{\partial \mu_{\mathcal{B}}}{\partial x_{i}}+\frac{\partial l}{\sigma_{\mathcal{B}}^{2}} \frac{\sigma_{\mathcal{B}}^{2}}{\partial x_{i}}+\frac{\partial l}{\hat{x}_{i}} \frac{\hat{x}_{i}}{\partial x_{i}} \\ &=\frac{\partial l}{\partial \mu_{\mathcal{B}}} \frac{1}{m}+\frac{\partial l}{\partial \sigma_{\mathcal{B}}^{2}} \frac{-2}{m}\left(x_{i}-\mu_{\mathcal{B}}\right)+\frac{\partial l}{\partial \hat{x}_{i}} \frac{1}{\sqrt{\sigma_{\mathcal{B}}^{2}+\epsilon}} \end{aligned}
∂xi∂l=∂μB∂l∂xi∂μB+σB2∂l∂xiσB2+x^i∂l∂xix^i=∂μB∂lm1+∂σB2∂lm−2(xi−μB)+∂x^i∂lσB2+ϵ1
求导完毕!!!
附上代码实现:
def batchnorm_forward(x, gamma, beta, bn_param):
"""
Forward pass for batch normalization.
Input:
- x: Data of shape (N, D)
- gamma: Scale parameter of shape (D,)
- beta: Shift paremeter of shape (D,)
- bn_param: Dictionary with the following keys:
- mode: 'train' or 'test'; required
- eps: Constant for numeric stability
- momentum: Constant for running mean / variance.
- running_mean: Array of shape (D,) giving running mean of features
- running_var Array of shape (D,) giving running variance of features
Returns a tuple of:
- out: of shape (N, D)
- cache: A tuple of values needed in the backward pass
"""
mode = bn_param['mode']
eps = bn_param.get('eps', 1e-5)
momentum = bn_param.get('momentum', 0.9)
N, D = x.shape
running_mean = bn_param.get('running_mean', np.zeros(D, dtype=x.dtype))
running_var = bn_param.get('running_var', np.zeros(D, dtype=x.dtype))
out, cache = None, None
if mode == 'train':
sample_mean = np.mean(x, axis=0)
sample_var = np.var(x, axis=0)
out_ = (x - sample_mean) / np.sqrt(sample_var + eps)
running_mean = momentum * running_mean + (1 - momentum) * sample_mean
running_var = momentum * running_var + (1 - momentum) * sample_var
out = gamma * out_ + beta
cache = (out_, x, sample_var, sample_mean, eps, gamma, beta)
elif mode == 'test':
scale = gamma / np.sqrt(running_var + eps)
out = x * scale + (beta - running_mean * scale)
else:
raise ValueError('Invalid forward batchnorm mode "%s"' % mode)
# Store the updated running means back into bn_param
bn_param['running_mean'] = running_mean
bn_param['running_var'] = running_var
return out, cache
def batchnorm_backward(dout, cache):
"""
Backward pass for batch normalization.
Inputs:
- dout: Upstream derivatives, of shape (N, D)
- cache: Variable of intermediates from batchnorm_forward.
Returns a tuple of:
- dx: Gradient with respect to inputs x, of shape (N, D)
- dgamma: Gradient with respect to scale parameter gamma, of shape (D,)
- dbeta: Gradient with respect to shift parameter beta, of shape (D,)
"""
dx, dgamma, dbeta = None, None, None
out_, x, sample_var, sample_mean, eps, gamma, beta = cache
N = x.shape[0]
dout_ = gamma * dout
dvar = np.sum(dout_ * (x - sample_mean) * -0.5 * (sample_var + eps) ** -1.5, axis=0)
dx_ = 1 / np.sqrt(sample_var + eps)
dvar_ = 2 * (x - sample_mean) / N
# intermediate for convenient calculation
di = dout_ * dx_ + dvar * dvar_
dmean = -1 * np.sum(di, axis=0)
dmean_ = np.ones_like(x) / N
dx = di + dmean * dmean_
dgamma = np.sum(dout * out_, axis=0)
dbeta = np.sum(dout, axis=0)
return dx, dgamma, dbeta
2. Batch Normalization的效果及其证明
(一) 减小Internal Covariate Shift的影响, 权重的更新更加稳健.
对于不带BN的网络,当权重发生更新后,神经元的输出会发生变化,也即下一层神经元的输入发生了变化.随着网络的加深,该影响越来越大,导致在每一轮迭代训练时,神经元接受的输入有很大的变化,此称为Internal Covariate Shift. 而BatchNormalization通过归一化和仿射变换(平移+缩放),使得每一层神经元的输入有近似的分布.
假设某一层神经网络为:
H
i
+
1
=
W
H
i
+
b
\mathbf{H_{i+1}} = \mathbf{W} \mathbf{H_i} + \mathbf{b}
Hi+1=WHi+b
对权重的导数为:
∂
l
∂
W
=
∂
l
∂
H
i
+
1
H
i
T
\frac{\partial l}{\partial \mathbf{W}} = \frac{\partial l}{\partial \mathbf{H_{i+1}}} \mathbf{H_i}^T
∂W∂l=∂Hi+1∂lHiT
对权重进行更新:
W
←
W
−
η
∂
l
∂
H
i
+
1
H
i
T
\mathbf{W} \leftarrow\mathbf{W} - \eta \frac{\partial l}{\partial \mathbf{H_{i+1}}} \mathbf{H_i}^T
W←W−η∂Hi+1∂lHiT
可见,当上一层神经元的输入(
H
i
\mathbf{H_i}
Hi)变化较大时,权重的更新变化波动大.
(二)batch Normalization具有权重伸缩不变性,可以有效提高反向传播的效率,同时还具有参数正则化的效果.
记BN为:
N
o
r
m
(
W
x
)
=
=
g
⋅
W
x
−
μ
σ
+
b
Norm(\mathbf{Wx}) = = \mathbf{g} \cdot \frac{\mathbf{W} \mathbf{x}-\mu}{\sigma}+\mathbf{b}
Norm(Wx)==g⋅σWx−μ+b
为什么具有权重不变性?
↓
\downarrow
↓
假设权重按照常量
λ
\lambda
λ进行伸缩,则其对应的均值和方差也会按比例伸缩,于是有:
N
o
r
m
(
W
′
x
)
=
g
⋅
W
′
x
−
μ
′
σ
′
+
b
=
g
⋅
λ
W
x
−
λ
μ
λ
σ
+
b
=
g
⋅
W
x
−
μ
σ
+
b
=
N
o
r
m
(
W
x
)
\begin{aligned} Norm\left(\mathbf{W}^{\prime} \mathbf{x}\right) &= \mathbf{g} \cdot \frac{\mathbf{W}^{\prime} \mathbf{x}-\mu^{\prime}}{\sigma^{\prime}}+\mathbf{b}\\&=\mathbf{g} \cdot \frac{\lambda \mathbf{W} \mathbf{x}-\lambda \mu}{\lambda \sigma}+\mathbf{b}\\ &= \mathbf{g} \cdot \frac{\mathbf{W} \mathbf{x}-\mu}{\sigma}+\mathbf{b}\\ &=Norm(\mathbf{W} \mathbf{x}) \end{aligned}
Norm(W′x)=g⋅σ′W′x−μ′+b=g⋅λσλWx−λμ+b=g⋅σWx−μ+b=Norm(Wx)
为什么能提高反向传播的效率?
↓
\downarrow
↓
考虑权重发生伸缩后,梯度的变化:
为方便(公式打累了),记
y
=
N
o
r
m
(
W
x
)
\mathbf{y}=Norm(\mathbf{Wx})
y=Norm(Wx)
∂
l
∂
x
=
∂
l
∂
y
∂
y
∂
x
=
∂
l
∂
y
∂
(
g
⋅
W
x
−
μ
σ
+
b
)
)
∂
x
=
∂
l
∂
y
g
⋅
W
σ
=
∂
l
∂
y
g
⋅
λ
W
λ
σ
\begin{aligned} \frac{\partial l}{\partial \mathbf{x}} &= \frac{\partial l}{\partial \mathbf{y}} \frac{\partial \mathbf{y}}{\partial \mathbf{x}}\\ &=\frac{\partial l}{\partial \mathbf{y}} \frac{\partial (\mathbf{g} \cdot \frac{\mathbf{W} \mathbf{x}-\mu}{\sigma}+\mathbf{b}))}{\partial \mathbf{x}}\\ &=\frac{\partial l}{\partial \mathbf{y}} \frac{\mathbf{g}\cdot\mathbf{W}}{\sigma}\\ &=\frac{\partial l}{\partial \mathbf{y}} \frac{\mathbf{g}\cdot \lambda\mathbf{W}}{\lambda\sigma} \end{aligned}
∂x∂l=∂y∂l∂x∂y=∂y∂l∂x∂(g⋅σWx−μ+b))=∂y∂lσg⋅W=∂y∂lλσg⋅λW
可以发现,当权重发生伸缩时,相应的
σ
\sigma
σ也会发生伸缩,最终抵消掉了权重伸缩的影响.
考虑更一般的情况,当该层权重较大(小)时,相应
σ
\sigma
σ也较大(小),最终梯度的传递受到权重影响被减弱,提高了梯度反向传播的效率.同时,
g
g
g也是可训练的参数,起到自适应调节梯度大小的作用.
为什么具有参数正则化的作用?
↓
\downarrow
↓
计算对权重的梯度:
∂
l
∂
W
=
∂
l
∂
y
∂
y
∂
W
=
∂
l
∂
y
∂
(
g
⋅
W
x
−
μ
σ
+
b
)
∂
W
=
∂
l
∂
y
g
⋅
x
T
σ
\begin{aligned} \frac{\partial l}{\partial \mathbf{W}} &= \frac{\partial l}{\partial \mathbf{y}} \frac{\partial\mathbf{y}}{\partial\mathbf{W}}\\ &=\frac{\partial l}{\partial \mathbf{y}} \frac{\partial(\mathbf{g} \cdot \frac{\mathbf{W} \mathbf{x}-\mu}{\sigma}+\mathbf{b})}{\partial \mathbf{W}}\\ &=\frac{\partial l}{\partial \mathbf{y}} \frac{\mathbf{g}\cdot \mathbf{x}^T}{\sigma} \end{aligned}
∂W∂l=∂y∂l∂W∂y=∂y∂l∂W∂(g⋅σWx−μ+b)=∂y∂lσg⋅xT
假设该层权重较大,则相应
σ
\sigma
σ也更大,计算出来梯度更小,相应地,
W
\mathbf{W}
W的变化值也越小,从而权重的变化更为稳定.但当权重较小时,相应
σ
\sigma
σ较小,梯度相应会更大,权重变化也会变大.
3. 为什么要加 γ \gamma γ, β \beta β
为了保证模型的表达能力不会因为规范化而下降.
如果激活函数为Sigmoid,则规范化后的数据会被映射到非饱和区(线性区),仅利用到线性变化能力会降低神经网络的表达能力.
如果激活函数使用的是ReLU,则规范化后的数据会固定地有一半被置为0.而可学习参数
β
\beta
β能通过梯度下降调整被激活的比例,提高了神经网络的表达能力.
经过归一化后再仿射变换,会不会跟没变一样?
首先,新参数的引入,将原来输入的分布囊括进去,而且能表达更多的分布;
其次,
x
\mathbf{x}
x的均值和方差和浅层的神经网络有复杂的关联,归一化之后变成
x
^
\hat{\mathbf{x}}
x^,再进行仿射变换
y
=
g
⋅
x
^
+
b
\mathbf{y}=\mathbf{g} \cdot \hat{\mathbf{x}}+\mathbf{b}
y=g⋅x^+b,能去除与浅层网络的密切耦合;
最后新参数可以通过梯度下降来学习,形成利于模型表达的分布.















 182
182

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









