







机器人定位(mobile robot localization):
机器人定位,就是相对外部的参考系来估计机器人坐标的问题。给定了环境地图,机器人需要参照传感器数据,定位自己在地图上的相对位置。比如,已知环境中有三个相同的门,机器人的任务就是要通过检测和运动找到自己在哪。 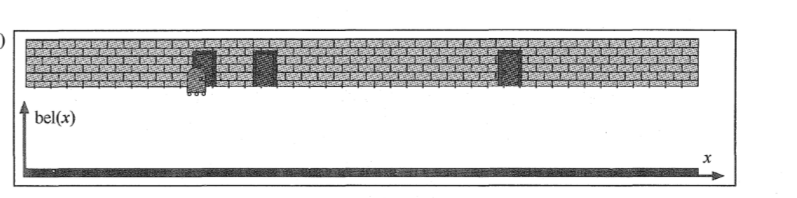
这种特定的定位问题为成为全局定位(global localizaiton)。在全局定位中,机器人被放置在已知的环境中的某处,然后从头开始确定自己的位置。
概率基础
边缘概率(又称先验概率):某个事件发生的概率。边缘概率是这样得到的:在联合概率中,把最终结果中那些不需要的事件通过合并成它们的全概率,而消去它们(对离散随机变量用求和得全概率,对连续随机变量用积分得全概率),这称为边缘化(marginalization),比如A的边缘概率表示为P(A),B的边缘概率表示为P(B)。
联合概率表示两个事件共同发生的概率。A与B的联合概率表示为P(A∩B)或者P(A,B)或者P(AB)。
条件概率(又称后验概率)
在事件B已经发生的条件下,求事件A发生的概率,称这种概率为事件B发生条件下事件A发生的条件概率,条件概率表示为P(A|B),读作“在B条件下A的概率”,。
接着,考虑一个问题:P(A|B)是在B发生的情况下A发生的可能性。
-
首先,事件B发生之前,我们对事件A的发生有一个基本的概率判断,称为A的先验概率,用P(A)表示;
-
其次,事件B发生之后,我们对事件A的发生概率重新评估,称为A的后验概率,用P(A|B)表示;
-
类似的,事件A发生之前,我们对事件B的发生有一个基本的概率判断,称为B的先验概率,用P(B)表示;
-
同样,事件A发生之后,我们对事件B的发生概率重新评估,称为B的后验概率,用P(B|A)表示。
等于AB同时发生的概率/B发生的概率
(1)条件概率定义
根据条件概率的定义,在事件B发生的条件下事件A发生的概率是
P(A|B)=P(A∩B)/P(B)
同样地,在事件A发生的条件下事件B发生的概率
P(B|A)=P(A∩B)/P(A)
整理与合并上述两个方程式,便可以得到:
P(A|B)P(B)=P(A∩B)=P(B|A)P(A)
接着,上式两边同除以P(B),若P(B)是非零的,我们便可以得到贝叶斯定理的公式表达式:
理解的一个关键点,区分出规律和现象,就是将A看成“规律”,B看成“现象”,那么贝叶斯公式看成:

全概率定理
从条件概率和概率测量公理得出的一个有趣事实经常被称为全概率定理(theorem of total probability):
离散情况
连续情况
联合分布概率公式:
证明:首先根据条件概率的计算式(1),并且利用计算技巧(再分子分母同时乘以一个因式),可得
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2405
2405











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









