







上一篇GPS定位中有讲到定位精度在米级,在城市里或者有遮挡的地方。会严重影响无人机的定位精度。所以我们需要继续寻找更优秀的定位方式。接下来我们一起了解下高精度的RTK定位,RTK定位是如何达到厘米级的精度。
NO.1 什么是RTK?
RTK(Real-Time Kinematic,实时动态)定位是一种基于载波相位测量的卫星导航技术,能够实现厘米级的高精度实时定位。
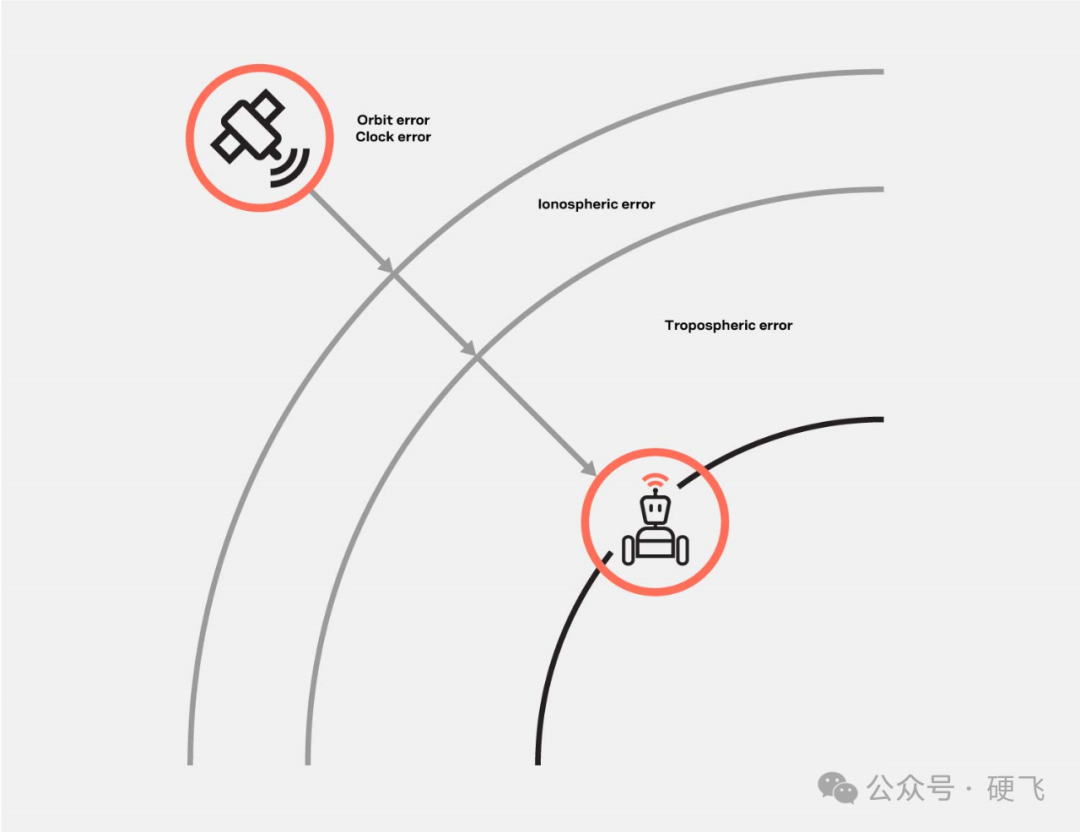
误差源
NO.2 RTK的工作原理
RTK是包含了基准站和移动站2个部分。移动站一般集成在无人机内部,而基准站通常部署在无人机工作范围内。一般基准站和移动站的硬件硬件是相同的,只是配置不同工作方式。基准站相当于是已知的精确坐标的位置,来实时接收卫星信号并计算误差(如电离层、对流层延迟及卫星钟差),将修正数据通过无线电或网络发送给移动站。移动站结合自身接收的卫星信号及修正数据,实时计算高精度位置。
相比传统GPS的伪距测量,RTK利用载波相位测量,精度更高。需要解决整周模糊度的难点。这样RTK就能实现厘米级精度以及动态实时应用。
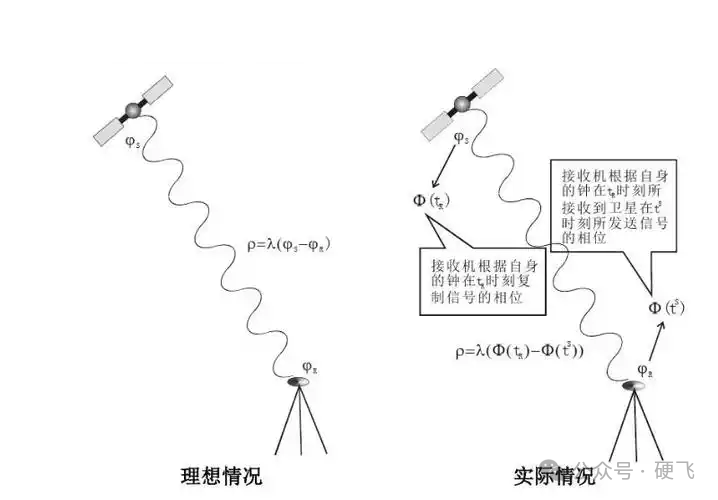
误差示意图
NO.3 RTK主要参数
定位精准:
-
-
水平精度:通常为1cm+1ppm(基准站与移动站距离每增加1km,误差增加1cm)。
-
垂直精度:略低于水平精度,约2cm+1ppm 。
-
航向角精度:通常在0.1°~0.5°。
-
时间参数:
-
-
收敛时间:首次定位(初始化)时间通常为10秒左右,取决于卫星信号质量与算法效率。
-
数据更新率:常规1Hz~20Hz。
-
延时:
-
-
基准站和流动站的数据是通过无线传输所以通信时延。
-
系统配置参数:
-
-
卫星系统支持:兼容不同的GNSS系统,如GPS(L1/L2/L5)、GLONASS(G1/G2)、Galileo(E1/E5)、北斗(B1/B2/B3)。
-
天线类型:
-
-
兼容多频段,如L1+L2/L5。
-
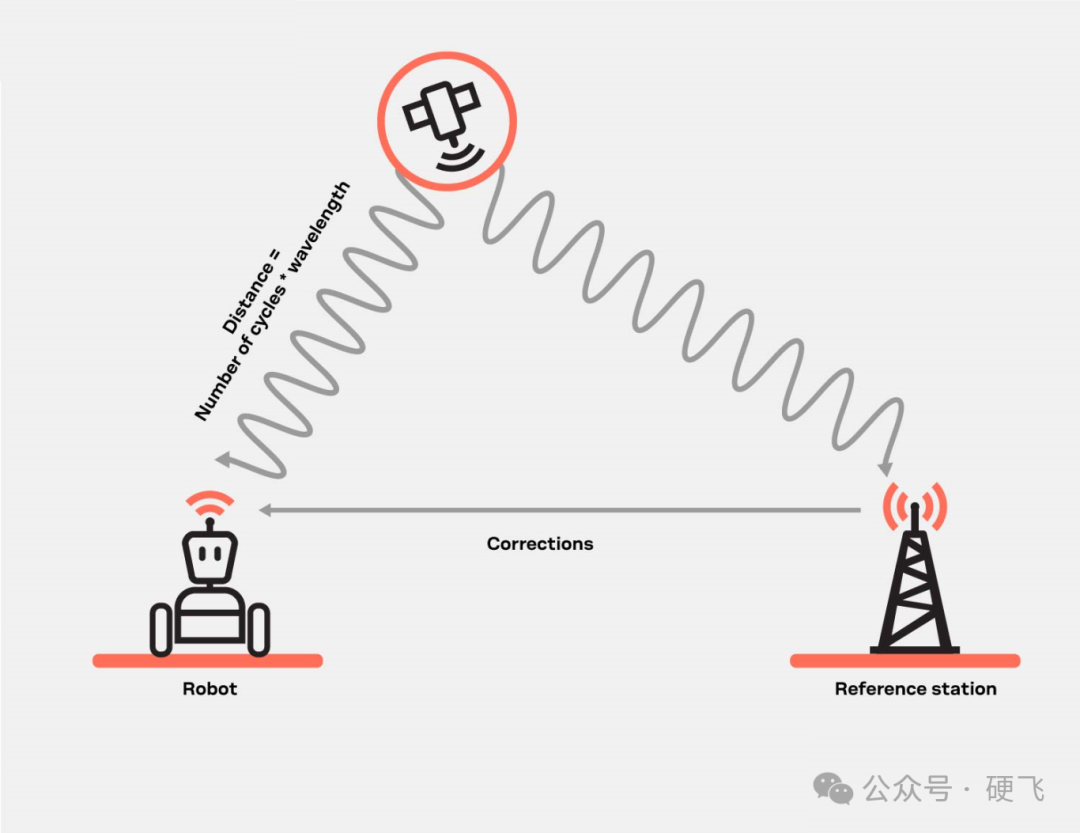
误差校正示意
NO.4 RTK在无人机中的应用
RTK技术赋予无人机厘米级定位能力,为测绘、农业、物流、巡检等行业的作业模式带来了颠覆性变革。随着无人机在产业链中的技术落地不断深入,RTK无人机的应用场景将持续拓展,成为智能空中作业的核心工具。
RTK流动站集成于无人机平台后,通过实时接收GNSS卫星信号及基准站发出的载波相位差分修正数据,利用实时动态载波相位差分技术进行融合解算,可输出厘米级精度的三维地理坐标。该定位信息通过串行通信接口传输至飞控系统,结合IMU惯性测量单元、气压计等多源传感器数据进行卡尔曼滤波融合,最终形成具备厘米级定位精度的导航解决方案,支撑无人机实现高精度自主航线飞行、定点悬停及精准复拍等任务。

小白提问:
RTK的航向角精度跟哪些参数有关呢?
RTK的航向角精度依赖于:
基线长度:航向角通过两个天线的位置差(基线向量)计算得出,基线越长,航向角精度越高。
天线质量:天线安装精度越高引入误差越小,使用高精度扼流圈天线可抑制多路径效应。
多系统支持及算法优化:同时支持多GNSS系统,增加卫星数量。提升基线解算可靠性。

参考来源:
认识实时动态测量技术:http://www.beidou.gov.cn/zy/kpyd/201710/t20171011_4546.html
搭载实时动态载波相位差分技术:https://www.u-blox.com/zh/technologies/rtk-real-time-kinematic

















 4553
4553

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









