







 本文详细介绍了差分GPS的基本原理,包括利用基准站校正误差、分类(如实时/事后、伪距/载波相位等)、不同类型差分的特点,以及RTK、NRTK和PPP等新技术的发展,展示了其在不同领域的广泛应用和未来潜力。
本文详细介绍了差分GPS的基本原理,包括利用基准站校正误差、分类(如实时/事后、伪距/载波相位等)、不同类型差分的特点,以及RTK、NRTK和PPP等新技术的发展,展示了其在不同领域的广泛应用和未来潜力。
差分GPS的基本原理
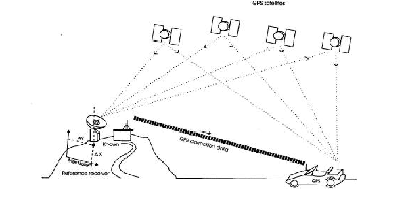
差分GPS(Differential GPS,简称DGPS)的基本原理是利用一个或多个已知精确坐标的基准站,与用户(移动站)同时接收相同的GPS卫星信号。由于GPS定位时会受到诸如卫星星历误差、卫星钟差、大气延迟、多径效应等多种因素的影响,导致单点定位精度受限。
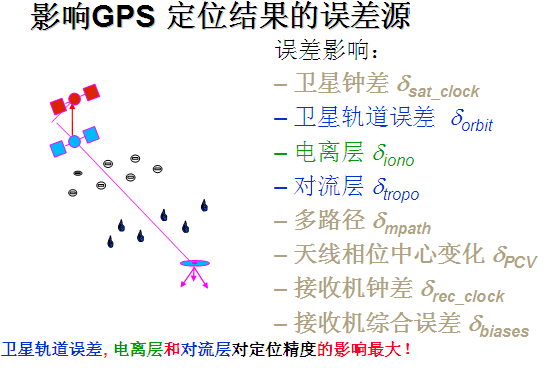
以上各类误差中除多路径效应均具有较强的空间相关性,从而定位结果也有一定的空间相关性。利用基准站(设在坐标精确已知的点上)测定具有空间相关性的误差或其对测量定位结果的影响,供流动站改正其观测值或定位结果。
差分改正数的类型
位置(坐标改正数)改正数:基准站上的接收机对GPS卫星进行观测,确定出测站的观测坐标,测站的已知坐标与观测坐标之差即为位置的改正数。
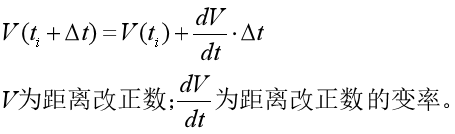
距离改正数:利用基准站坐标和卫星星历可计算出站星间的计算距离,计算距离减去观测距离即为距离改正数
差分GPS的分类
根据时效性:实时差分,事后差分。
根据观测值类型:伪距差分,载波相位平滑伪距差分,载波相位差分。
根据差分改正数:位置差分(坐标差分),距离差分(伪距、载波相位)。
根据工作
原理和差分模型:局域差分(LADGPS – Local Area DGPS),单基准站差分,多基准站差分,广域差分(WADGPS – Wide Area DGPS)。
位置差分和距离差分的特点
位置差分
差分改正计算的数学模型简单,差分数据的数据量少,基准站与流动站要求观测完全相同的一组卫星,差分精度3m,作用距离100km,无数据期龄概念。
距离差分
差分改正计算的数学模型较复杂,差分数据的数据量较多,基准站与流动站不要求观测完全相同的一组卫星,差分精度3m,作用距离100km,数据龄期30S。
单基准站局域差分

基准站(一个)、数据通讯链和用户,数学模型(差分改正数的计算方法),提供距离改正和距离改正的变率。
优点:结构、模型简单。
缺点:差分范围小,精度随距基准站距离的增加而下降,可靠性低。
多基准站局域差分(LADGPS)
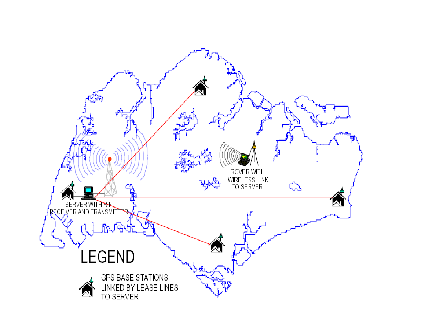
基准站(多个)、数据通讯链和用户,数学模型(差分改正数的计算方法),加权平均,偏导数法,最小方差法。
优点:差分精度高、可靠性高,差分范围增大。
缺点:差分范围仍然有限,模型不完善。
广域差分
基准站(多个)、数据处理中心、数据通讯链、监测站和用户
数学模型(差分改正数的计算方法),与普通差分不相同,普通差分是考虑的是误差的综合影响,广域差分对各项误差加以分离,建立各自的改正模型,用户根据自身的位置,对观测值进行改正。
优点:差分精度高、差分精度与距离无关、差分范围大。
缺点:系统结构复杂、建设费用高。
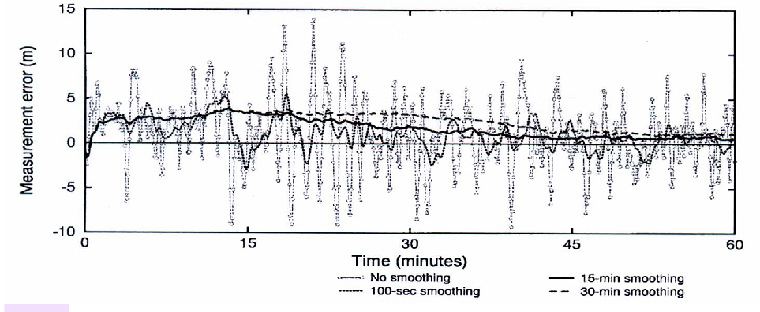
载波相位平滑伪距
由于载波相位的测量精度比伪距测量精度高2个数量级,而且载波相位测量受多路径效应的影响比伪距测量小2个数量级,如果能获得整周模糊度,就可以获得近于无噪声的伪距测量。一般情况下,无法获得整周模糊度,但能获得多普勒计数或载波相位变化信息。因此若能够利用载波相位变化信息来辅助伪距测量就可以获得比单独采用伪距测量更高的精度,这一思想称为载波相位平滑伪距测,目的是提高伪距观测值的精度。
伪距和载波相位方程同在相邻历元间求差。
差分GPS新进展:
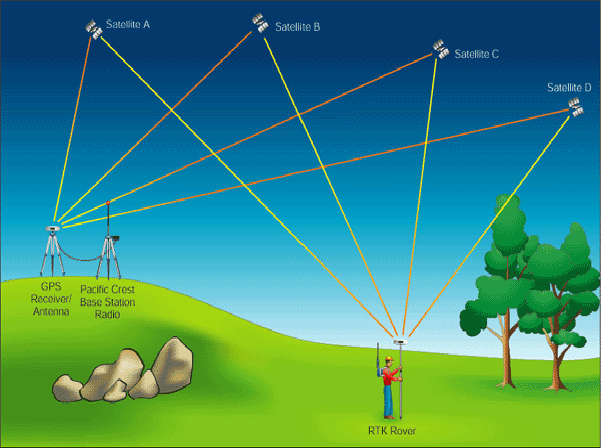
RTK技术
基准站建在已知或未知点上,基准站接收到的卫星信号通过无线通信网实时发给用户,用户接收机将接收到的卫星信号和收到基准站信号实时联合解算,求得基准站和流动站间坐标增量(基线向量)。站间距30公里,平面精度1-2厘米。
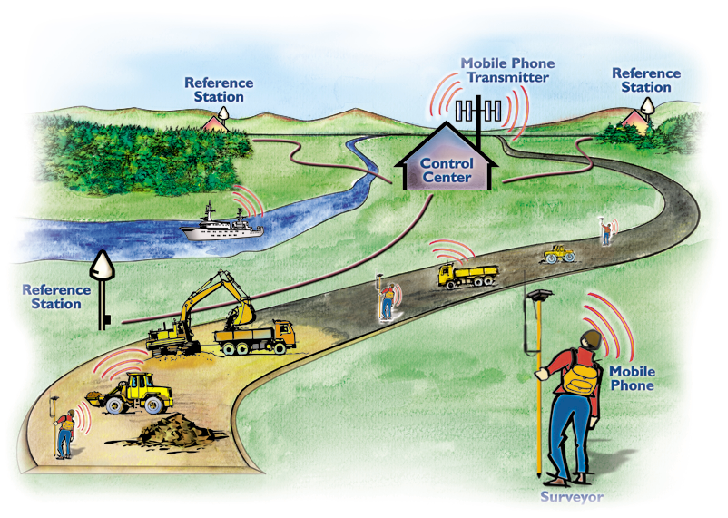
网络RTK (Network RTK, NRTK)
网络RTK系统利用多个基准站组成的连续运行参考站网络(CORS),提供更大范围内的高精度定位服务。移动用户可以通过互联网或专用通信网络接收来自多个基准站的改正信息,从而提高可靠性并扩展服务区域。
多星座支持
随着GPS之外的其他全球导航卫星系统(GNSS)的发展,包括俄罗斯GLONASS、欧洲伽利略、中国北斗以及日本准天顶卫星系统QZSS等,现代差分GPS设备普遍能够接收并处理多种卫星信号,从而提高了可用性、增强了抗干扰能力和定位精度。
PPP(Precise Point Positioning)
PPP是一种单点精密定位技术,通过接收全球卫星系统的数据,并结合国际地球自转与参考系统服务(IERS)提供的精密星历和钟差产品,可以在无地面基站的情况下实现优于传统DGPS的定位精度。
差分GPS技术正随着科技的发展持续进步,不仅在传统的测绘、航空航海等领域发挥重要作用,在新兴的无人驾驶、智慧城市、精准农业等方向也展现出巨大的潜力。


















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











