






无人机高空视觉定位技术方案概述
作者:凌启科技
1 无人机常用定位技术
目前无人机常用定位技术有GPS、RTK、UWB以及视觉定位(也可称为光流定位),不同定位技术其特性都不一样,GPS、RTK、UWB都需要基站才能工作,可归类为通信类定位技术,而光流定位技术是基于数字图像处理,不需要基站,这一特点非常适合通信信号不稳定的场景,这里将重点介绍高空视觉定位技术。
2 光流定位技术的原理
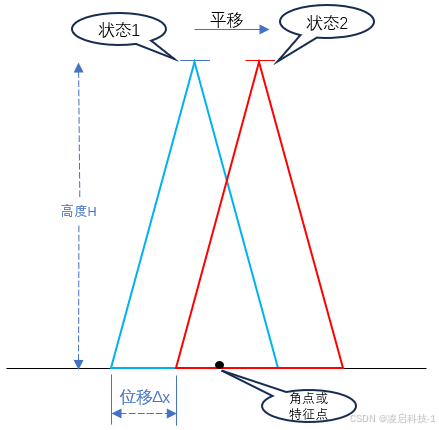
如下图,光流模块从状态1运动到状态2,摄像机在两个状态时分别拍下了一张图片,场通过算法,可以找到景中的角点或者特征点在两幅图片中的像素坐标,而这个坐标的差值就是模块运动的位移,记为Δpx,单位是像素,可称为像素距离,要想知道模块实际运动了多少物理距离,那么就必须要将像素距离转换为物理距离,这就需要知道每个像素所代表的物理距离,通过高度H、镜头视场角和图像分辨率就可以计算出每个像素所代表的物理距离,镜头视场角和图像分辨率是已知的,高度H需要实时测量,所以视觉定位除了光流模块,还必须要有测距模块。
视觉定位的精度由光流模块和测距模块的精度共同决定。
3 高空视觉定位方案概述
无人机有三个维度的位置信息,即水平位移XY、高度H。凌启科技研发的双目测距及光流一体模块可提供水平XY、旋转角R、高度H四维运动信息,外加IMU、地磁计、气压计,可实现无人机高空定位。具体思路如下:
对于空中定高,利用IMU、气压计和双目测距(凌启科技的LQ-S88、LQ-S200D可分别提供最大30米、70米的测距)进行融合,可得到一个以气压计为主的海拔高度数据和一个以双目测距为主的对地高度数据,前者主要用于无人机的定高,所以海拔高度数据的灵敏度和精度都很重要,而后者则是用于光流解算物理距离。
对于水平位移XY,需要有光流数据和对地高度,相对与海报高度,对地高度的重复精度比灵敏度更重要,因为在高空一个像素代表的物理距离较大,对地高度数据带来的重复误差会直接降低最终的视觉定位精度,在进行滤波时,可适当牺牲数据灵敏度来提高重复精度。双目测距及光流一体模块可提供高精度的光流数据,将双目测距数据处理好后,可实现高空视觉定位。
4 对地高度数据的处理
为了得到更好的定位效果,对地高度数据必须要做处理,如下是处理的思路:
1、以双目测距数据为主,与IMU、气压计做融合,排除无人机突然的倾角变化对视觉的影响以及在弱纹理低光照时的数据不稳定,得到更加稳定、鲁棒性更高的对地高度数据;
2、对地高度数据的稳定性比灵敏度更重要,滤波算法可以增大数据延时以优先保证对地数据的稳定性,同时采用自适应策略,根据遥控器数据、气压计数据、IMU数据等其他传感器综合判断无人机的运动状态,如果检测到无人机高度发生了变化,则短时间内保证对地数据的灵敏度便于对地高度数据快速响应,短暂时间后再回到优先保证数据稳定性的状态,这样就能做好高空视觉定位,做好各传感器的融合是飞控的关键技术之一。

















 1812
1812

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









