







前言
文章会省略一些不相关的代码,用//...表示,还有很多东西没有写,慢慢更新吧,如果有什么错误的地方欢迎留言指出
main函数(main.c)
//main.c
int main(int argc, char * argv[])
{
#ifdef SIMULATOR_BUILD
targetParseArgs(argc, argv);
#else
UNUSED(argc);
UNUSED(argv);
#endif
init();
run();
return 0;
}init函数(init.c)
开始运行时,通过init函数进行初始化,这其中包括tasks的初始化以及pid配置的载入
//init.c
void init(void)
{
//....
tasksInitData();
//....
pidInit(currentPidProfile);
//....
tasksInit();
//....
}pidInit函数(pid_inti.c)
//pid_init.c
void pidInit(const pidProfile_t *pidProfile)
{
pidSetTargetLooptime(gyro.targetLooptime); // Initialize pid looptime
pidInitFilters(pidProfile);
pidInitConfig(pidProfile);
#ifdef USE_RPM_FILTER
rpmFilterInit(rpmFilterConfig(), gyro.targetLooptime);
#endif
}taskInitData 函数和taskInit 函数(task.c)
//task.c
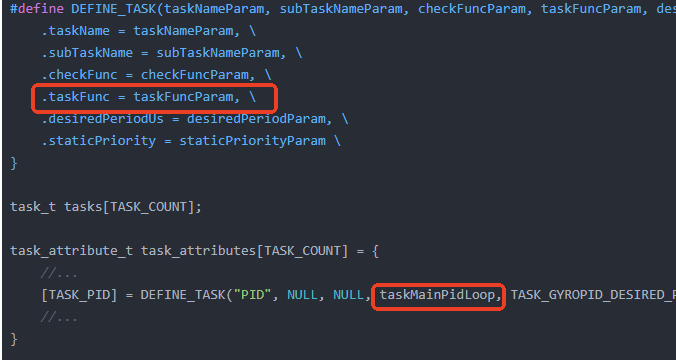
#define DEFINE_TASK(taskNameParam, subTaskNameParam, checkFuncParam, taskFuncParam, desiredPeriodParam, staticPriorityParam) { \
.taskName = taskNameParam, \
.subTaskName = subTaskNameParam, \
.checkFunc = checkFuncParam, \
.taskFunc = taskFuncParam, \
.desiredPeriodUs = desiredPeriodParam, \
.staticPriority = staticPriorityParam \
}
task_t tasks[TASK_COUNT];
task_attribute_t task_attributes[TASK_COUNT] = {
//...
[TASK_PID] = DEFINE_TASK("PID", NULL, NULL, taskMainPidLoop, TASK_GYROPID_DESIRED_PERIOD, TASK_PRIORITY_REALTIME),
//...
}
void tasksInitData(void)
{
for (int i = 0; i < TASK_COUNT; i++) {
tasks[i].attribute = &task_attributes[i];
}
}
void tasksInit(void)
{
//...
setTaskEnabled(TASK_PID, true);
//...
}run函数(main.c)
//main.c
void FAST_CODE run(void)
{
while (true) {
scheduler();
//....
}
}初始化完成后,开始进入程序主循环
scheduler函数(scheduler.c)
//scheduler.c
FAST_CODE void scheduler(void)
{
//...
if (pidLoopReady()) {
taskExecutionTimeUs += schedulerExecuteTask(getTask(TASK_PID), currentTimeUs);
}
//...
}
在scheduler函数中,会调用schedulerExecuteTask函数,getTask返回索引为TASK_PID枚举的task_t*指针
schedulerExecuteTask函数(scheduler.c)
//scheduler.c
FAST_CODE timeUs_t schedulerExecuteTask(task_t *selectedTask, timeUs_t currentTimeUs)
{
//......
selectedTask->attribute->taskFunc(currentTimeBeforeTaskCallUs);
//......
}schedulerExecuteTask函数中selectedTask->attribute->taskFunc函数指针调用的函数名为taskMainPidLoop
getTask函数(task.c)
//task.c
task_t *getTask(unsigned taskId)
{
return &tasks[taskId];
}taskMainPidLoop函数(core.c)
//core.c
FAST_CODE void taskMainPidLoop(timeUs_t currentTimeUs)
{
//....
subTaskPidController(currentTimeUs);
//....
}subTaskPidController函数(core.c)
//core.c
static FAST_CODE_NOINLINE void subTaskPidController(timeUs_t currentTimeUs)
{
//.....
pidController(currentPidProfile, currentTimeUs);
//.....
}subTaskPidController函数中会调用pidController函数,其中包含了betaflight PID的算法逻辑
pidController函数(pid.c)
//pid.c
void FAST_CODE pidController(const pidProfile_t *pidProfile, timeUs_t currentTimeUs)
{
static float previousGyroRateDterm[XYZ_AXIS_COUNT];
static float previousRawGyroRateDterm[XYZ_AXIS_COUNT];
//...
const float tpaFactorKp = (pidProfile->tpa_mode == TPA_MODE_PD) ? pidRuntime.tpaFactor : 1.0f;
//...
for (int axis = FD_ROLL; axis <= FD_YAW; ++axis) {
float currentPidSetpoint = getSetpointRate(axis);
//...
if (axis < FD_YAW) {
if (levelMode == LEVEL_MODE_RP || (levelMode == LEVEL_MODE_R && axis == FD_ROLL))
{
pidRuntime.axisInAngleMode[axis] = true;
currentPidSetpoint = pidLevel(axis, pidProfile, angleTrim, currentPidSetpoint, horizonLevelStrength);
}
}
else
{
//...
}
//...
// -----calculate error rate
const float gyroRate = gyro.gyroADCf[axis]; // Process variable from gyro output in deg/sec
float errorRate = currentPidSetpoint - gyroRate; // r - y
const float previousIterm = pidData[axis].I;
float itermErrorRate = errorRate;
//...
// -----calculate P component
pidData[axis].P = pidRuntime.pidCoefficient[axis].Kp * errorRate * tpaFactorKp;
if (axis == FD_YAW) {
pidData[axis].P = pidRuntime.ptermYawLowpassApplyFn((filter_t *)&pidRuntime.ptermYawLowpass, pidData[axis].P);
}
// -----calculate I component
float Ki = pidRuntime.pidCoefficient[axis].Ki;
const float iTermChange = (Ki + pidRuntime.itermAccelerator) * dynCi * pidRuntime.dT * itermErrorRate;
pidData[axis].I = constrainf(previousIterm + iTermChange, -pidRuntime.itermLimit, pidRuntime.itermLimit);
//....
// -----calculate D component
float pidSetpointDelta = 0;
//...
const float delta = - (gyroRateDterm[axis] - previousGyroRateDterm[axis]) * pidRuntime.pidFrequency;
float preTpaD = pidRuntime.pidCoefficient[axis].Kd * delta;
//...
pidRuntime.previousPidSetpoint[axis] = currentPidSetpoint;
//...
pidData[axis].D = preTpaD * pidRuntime.tpaFactor;
//...
// -----calculate feedforward component
// include abs control correction in feedforward
pidSetpointDelta += setpointCorrection - pidRuntime.oldSetpointCorrection[axis];
pidRuntime.oldSetpointCorrection[axis] = setpointCorrection;
// no feedforward in launch control
const float feedforwardGain = launchControlActive ? 0.0f : pidRuntime.pidCoefficient[axis].Kf;
pidData[axis].F = feedforwardGain * pidSetpointDelta;
//....
// calculating the PID sum
const float pidSum = pidData[axis].P + pidData[axis].I + pidData[axis].D + pidData[axis].F;
if (axis == FD_YAW && pidRuntime.useIntegratedYaw) {
pidData[axis].Sum += pidSum * pidRuntime.dT * 100.0f;
pidData[axis].Sum -= pidData[axis].Sum * pidRuntime.integratedYawRelax / 100000.0f * pidRuntime.dT / 0.000125f;
} else
{
pidData[axis].Sum = pidSum;
}
}
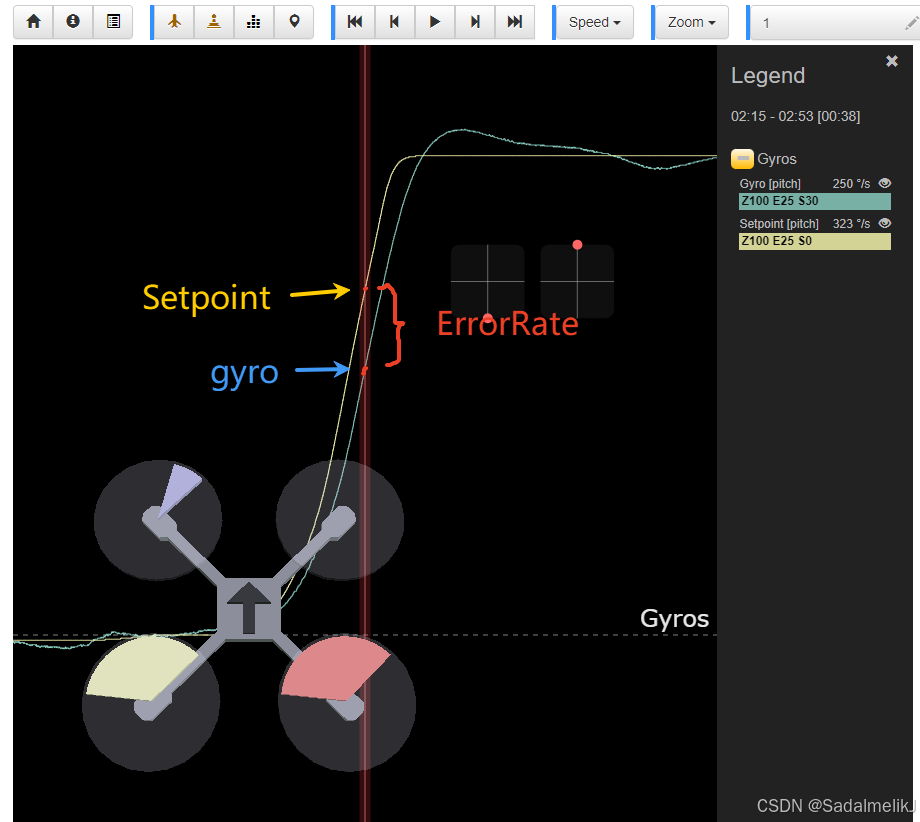
}Setpoint
currentPidSetpoint是遥控信号经过换算后的目标角速度(手动模式和自稳模式会有所不同)
//pid.c
float currentPidSetpoint = getSetpointRate(axis);getSetpointRate函数(rc.c)
//rc.c
float getSetpointRate(int axis)
{
#ifdef USE_RC_SMOOTHING_FILTER
return setpointRate[axis];
#else
return rawSetpoint[axis];
#endif
}自稳模式的setpoint会调用pidLevel函数进行换算:
if (axis < FD_YAW) {
if (levelMode == LEVEL_MODE_RP || (levelMode == LEVEL_MODE_R && axis == FD_ROLL))
{
pidRuntime.axisInAngleMode[axis] = true;
currentPidSetpoint = pidLevel(axis, pidProfile, angleTrim, currentPidSetpoint, horizonLevelStrength);
}
}
else
{
//...
}pidLevel函数(pid.c)
//pid.c
STATIC_UNIT_TESTED FAST_CODE_NOINLINE float pidLevel(int axis, const pidProfile_t *pidProfile, const rollAndPitchTrims_t *angleTrim,
float currentPidSetpoint, float horizonLevelStrength)
{
// Applies only to axes that are in Angle mode
// We now use Acro Rates, transformed into the range +/- 1, to provide setpoints
const float angleLimit = pidProfile->angle_limit;
float angleFeedforward = 0.0f;
#ifdef USE_FEEDFORWARD
angleFeedforward = angleLimit * getFeedforward(axis) * pidRuntime.angleFeedforwardGain * pidRuntime.maxRcRateInv[axis];
// angle feedforward must be heavily filtered, at the PID loop rate, with limited user control over time constant
// it MUST be very delayed to avoid early overshoot and being too aggressive
angleFeedforward = pt3FilterApply(&pidRuntime.angleFeedforwardPt3[axis], angleFeedforward);
#endif
float angleTarget = angleLimit * currentPidSetpoint * pidRuntime.maxRcRateInv[axis];
// use acro rates for the angle target in both horizon and angle modes, converted to -1 to +1 range using maxRate
#ifdef USE_GPS_RESCUE
angleTarget += gpsRescueAngle[axis] / 100.0f; // Angle is in centidegrees, stepped on roll at 10Hz but not on pitch
#endif
const float currentAngle = (attitude.raw[axis] - angleTrim->raw[axis]) / 10.0f; // stepped at 500hz with some 4ms flat spots
const float errorAngle = angleTarget - currentAngle;
float angleRate = errorAngle * pidRuntime.angleGain + angleFeedforward;
// minimise cross-axis wobble due to faster yaw responses than roll or pitch, and make co-ordinated yaw turns
// by compensating for the effect of yaw on roll while pitched, and on pitch while rolled
// earthRef code here takes about 76 cycles, if conditional on angleEarthRef it takes about 100. sin_approx costs most of those cycles.
float sinAngle = sin_approx(DEGREES_TO_RADIANS(pidRuntime.angleTarget[axis == FD_ROLL ? FD_PITCH : FD_ROLL]));
sinAngle *= (axis == FD_ROLL) ? -1.0f : 1.0f; // must be negative for Roll
const float earthRefGain = FLIGHT_MODE(GPS_RESCUE_MODE) ? 1.0f : pidRuntime.angleEarthRef;
angleRate += pidRuntime.angleYawSetpoint * sinAngle * earthRefGain;
pidRuntime.angleTarget[axis] = angleTarget; // set target for alternate axis to current axis, for use in preceding calculation
// smooth final angle rate output to clean up attitude signal steps (500hz), GPS steps (10 or 100hz), RC steps etc
// this filter runs at ATTITUDE_CUTOFF_HZ, currently 50hz, so GPS roll may be a bit steppy
angleRate = pt3FilterApply(&pidRuntime.attitudeFilter[axis], angleRate);
if (FLIGHT_MODE(ANGLE_MODE) || FLIGHT_MODE(GPS_RESCUE_MODE)) {
currentPidSetpoint = angleRate;
} else {
// can only be HORIZON mode - crossfade Angle rate and Acro rate
currentPidSetpoint = currentPidSetpoint * (1.0f - horizonLevelStrength) + angleRate * horizonLevelStrength;
}
//logging
if (axis == FD_ROLL) {
DEBUG_SET(DEBUG_ANGLE_MODE, 0, lrintf(angleTarget * 10.0f)); // target angle
DEBUG_SET(DEBUG_ANGLE_MODE, 1, lrintf(errorAngle * pidRuntime.angleGain * 10.0f)); // un-smoothed error correction in degrees
DEBUG_SET(DEBUG_ANGLE_MODE, 2, lrintf(angleFeedforward * 10.0f)); // feedforward amount in degrees
DEBUG_SET(DEBUG_ANGLE_MODE, 3, lrintf(currentAngle * 10.0f)); // angle returned
DEBUG_SET(DEBUG_ANGLE_TARGET, 0, lrintf(angleTarget * 10.0f));
DEBUG_SET(DEBUG_ANGLE_TARGET, 1, lrintf(sinAngle * 10.0f)); // modification factor from earthRef
// debug ANGLE_TARGET 2 is yaw attenuation
DEBUG_SET(DEBUG_ANGLE_TARGET, 3, lrintf(currentAngle * 10.0f)); // angle returned
}
DEBUG_SET(DEBUG_CURRENT_ANGLE, axis, lrintf(currentAngle * 10.0f)); // current angle
return currentPidSetpoint;
}ErrorRate
//pid.c
const float gyroRate = gyro.gyroADCf[axis];
float errorRate = currentPidSetpoint - gyroRate; gyroRate是滤波后的陀螺仪角速度,errorRate则是陀螺仪角速度与setpoint(目标角速度)的差值
P值
施工中。。。。未完待续
文章出现的数据类型定义等
taskId_e 枚举
//scheduler.h
typedef enum {
//.....
TASK_PID,
//.....
} taskId_e;task_t 结构体
//scheduler.h
typedef struct {
//......
task_attribute_t *attribute;
//......
} task_t;task_attribute_t 结构体
//scheduler.h
typedef struct {
//......
void (*taskFunc)(timeUs_t currentTimeUs);
//......
} task_attribute_t;DEFINE_TASK宏定义
//task.c
#define DEFINE_TASK(taskNameParam, subTaskNameParam, checkFuncParam, taskFuncParam, desiredPeriodParam, staticPriorityParam) { \
.taskName = taskNameParam, \
.subTaskName = subTaskNameParam, \
.checkFunc = checkFuncParam, \
.taskFunc = taskFuncParam, \
.desiredPeriodUs = desiredPeriodParam, \
.staticPriority = staticPriorityParam \
}附录
看点好玩的

















 3047
3047

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









