






在这一讲中我们来学习一下opencv中最基本的边缘检测的知识,首先我们来介绍一下图像梯度
1.图像梯度
可以把图像看成二维离散函数,图像梯度其实就是这个二维离散函数的求导:
图像梯度:
梯度算子 Gradient operators
函数f(x,y)在(x,y)处的梯度为一个向量:

计算这个向量的大小为:

近似为:

梯度的方向角为:

可能上面的数学表达式大家觉得还是过于抽象,那么我们将图片看成是二维的离散函数,那么图像的梯度其实就是这个二维离散函数的求导(偏导数)
图像梯度: G(x,y) = dx i + dy j;
dx(i,j) = I(i+1,j) - I(i,j);
dy(i,j) = I(i,j+1) - I(i,j);
其中,I是图像像素的值(如:RGB值),(i,j)为像素的坐标。
图像梯度一般也可以用中值差分:
dx(i,j) = [I(i+1,j) - I(i-1,j)]/2;
dy(i,j) = [I(i,j+1) - I(i,j-1)]/2;
图像边缘一般都是通过对图像进行梯度运算来实现的。
图像梯度的最重要性质是,梯度的方向在图像灰度最大变化率上,它恰好可以反映出图像边缘上的灰度变化
上面说的是简单的梯度定义,其实还有更多更复杂的梯度公式。
2.边缘检测
关于边缘的细节知识,请参考博主 http://blog.csdn.net/xiaowei_cqu/article/details/7829481
下面让我们来看一下边缘检测中常用的一些算子:
sobel算子边缘检测算法
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰度之近似值。在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量
Sobel卷积因子为:
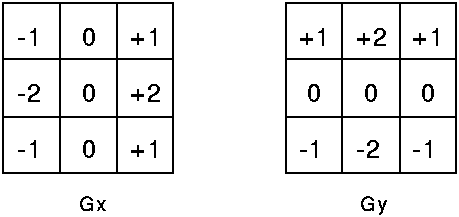
具体计算如下:
Gx = (-1)*f(x-1, y-1) + 0*f(x,y-1) + 1*f(x+1,y-1)
+(-2)*f(x-1,y) + 0*f(x,y)+2*f(x+1,y)
+(-1)*f(x-1,y+1) + 0*f(x,y+1) + 1*f(x+1,y+1)
= [f(x+1,y-1)+2*f(x+1,y)+f(x+1,y+1)]-[f(x-1,y-1)+2*f(x-1,y)+f(x-1,y+1)]
Gy =1* f(x-1, y-1) + 2*f(x,y-1)+ 1*f(x+1,y-1)
+0*f(x-1,y) 0*f(x,y) + 0*f(x+1,y)
+(-1)*f(x-1,y+1) + (-2)*f(x,y+1) + (-1)*f(x+1, y+1)
= [f(x-1,y-1) + 2f(x,y-1) + f(x+1,y-1)]-[f(x-1, y+1) + 2*f(x,y+1)+f(x+1,y+1)]
其中f(a,b), 表示图像(a,b)点的灰度值;
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
其实在边缘检测中还会用到很多算子,如普利维特算子(Prewitt operate);罗伯茨交叉边缘检测(Roberts Cross operator);拉普拉斯算子等等。
2.opencv中Sobel算子实现边缘检测效果图
先上效果图:


当然,opencv中其实上面的代码完全可以用
void cvSobel( const CvArr* src, CvArr* dst, int xorder, int yorder, int aperture_size=3 );
这个函数来代替,相应的参数大家可以去百度,在这就不一一介绍了,本文主要针对sobel算子的检测原理来进行说明。
代码如下
-
#include "cv.h"
-
#include "highgui.h"
-
#include "math.h"
-
#include "stdio.h"
-
#include "malloc.h"
-
IplImage *image;
//声明IplImage指针
-
int height, width;
-
CvScalar s;
-
int sobel_y[
9] = {
1,
2,
1,
0,
0,
0,
-1,
-2,
-1 };
//y方向sobel算子
-
int sobel_x[
9] = {
1,
0,
-1,
2,
0,
-2,
1,
0,
-1 };
//x方向sobel算子
-
void sobel()
-
{
-
int i, j, k;
-
int grayx =
0, grayy =
0, gray;
-
int *data;
-
int a[
9];
-
data = (
int *)
malloc(height*width*
sizeof(
int));
-
for (i =
0; i<height; i++)
-
{
-
for (j =
0; j<width; j++)
-
{
-
s = cvGet2D(image, i, j);
-
gray = (
int)s.val[
0];
-
data[i*width + j] = gray;
-
}
-
}
-
for (i =
1; i<height -
1; i++)
-
{
-
for (j =
1; j<width -
1; j++)
-
{
-
grayx =
0;
-
grayy =
0;
-
s = cvGet2D(image, i, j);
-
a[
0] = data[width*(i -
1) + j -
1];
-
a[
1] = data[width*(i -
1) + j];
-
a[
2] = data[width*(i -
1) + j +
1];
-
a[
3] = data[width*i + j -
1];
-
a[
4] = data[width*i + j];
-
a[
5] = data[width*i + j +
1];
-
a[
6] = data[width*(i +
1) + j -
1];
-
a[
7] = data[width*(i +
1) + j];
-
a[
8] = data[width*(i +
1) + j +
1];
-
for (k =
0; k<
9; k++)
-
grayy += a[k] * sobel_y[k];
-
for (k =
0; k<
9; k++)
-
grayx += a[k] * sobel_x[k];
-
s.val[
0] = (
abs(grayx) +
abs(grayy));
//此处需要取绝对值
-
cvSet2D(image, i, j, s);
-
}
-
}
-
free(data);
-
}
-
int main(int argc, char** argv)
-
{
-
image = cvLoadImage(
"image1.jpg",
0);
-
IplImage* image1 = cvLoadImage(
"image1.jpg",
1);
-
height = image->height;
-
width = image->width;
-
sobel();
-
cvNamedWindow(
"Image",
1);
//创建窗口
-
cvNamedWindow(
"Sobel",
1);
//创建窗口
-
cvShowImage(
"Image", image1);
//显示图像
-
cvShowImage(
"Sobel", image);
//显示图像
-
cvWaitKey(
0);
//等待按键
-
cvDestroyWindow(
"Image");
//销毁窗口
-
cvReleaseImage(&image);
//释放图像
-
return
0;
-
}
参考文章:

















 2568
2568

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









