







 超级会员免费看
超级会员免费看
 工控机在视觉检测中遇到MVS软件显示速率低于1GB和相机丢包问题。通过调整MVS设置,如关闭采集控制帧速率控制,修改LAN属性的中断记录、接收缓冲区和传输缓冲区大小,以及禁用电源管理中的设备关闭选项,可以优化性能。此外,参照相关博客检查并调整系统参数以减少丢包现象。
工控机在视觉检测中遇到MVS软件显示速率低于1GB和相机丢包问题。通过调整MVS设置,如关闭采集控制帧速率控制,修改LAN属性的中断记录、接收缓冲区和传输缓冲区大小,以及禁用电源管理中的设备关闭选项,可以优化性能。此外,参照相关博客检查并调整系统参数以减少丢包现象。
MVS软件显示速率低与1GB
工控机主要应用与视觉检测!相机网线及工控机网口都是千兆的!设置完巨帧数和速度与双工(选择为全双工),显示速度低与1GB,不能够正常工作
这种情况均为MVS设置不熟悉,可参照如下设置优化相应端口相机配置
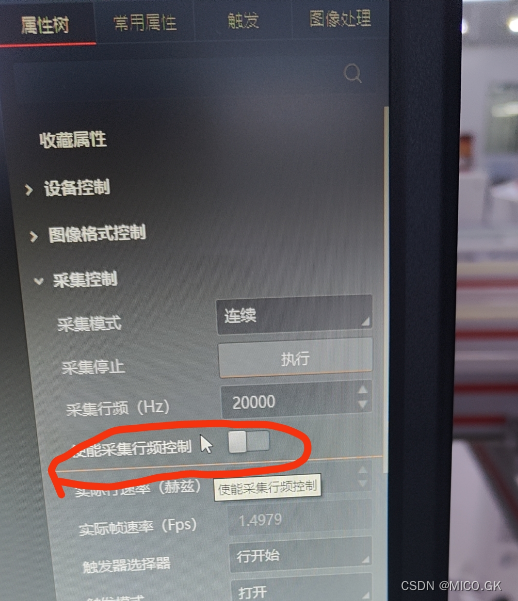

A.关闭采集控制帧速率控制。
B.LAN-属性-高级-将中断记录部分更改为执行。
C.LA-Properdes-Advanced-将RecerveBuffers更改为2048。
D.局域网-属性-高级-将传输缓冲区更改为20484。
E.LAN-属性-电源管理-取消选中允许计算机关闭此设备以保存电源
相机丢包可在系统下检查如下参数设置,参考此博文:

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 3068
3068

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











