







本篇博客重点在于介绍SPI时序以及W25Q128操作的相关知识点以及注意事项。
1. SPI协议
SPI(Serial Peripheral interface),串行外围外设接口,属于一种高速全双工的通信总线。
1.1 SPI物理层
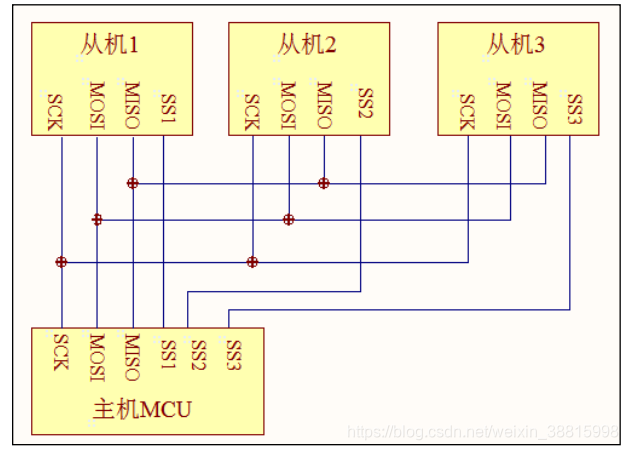
图1-1 SPI通讯接线
| 信号线名称 | 作用 |
|---|---|
 (片选信号线) (片选信号线) | SPI和IIC不同,从设备没有自身地址,需要通过片选信号线选择从设备,同时片选信号线还有发送起始和终止通讯信号的作用 |
| SCK(时钟信号线) | SPI属于同步通讯,需要主机提供时钟信号,统一数据交换时序 |
| MOSI | Master Output, Slave Input,也就是主机输出,从机输入 |
| MISO | Master Input, Slave Output |
1.2 SPI协议层
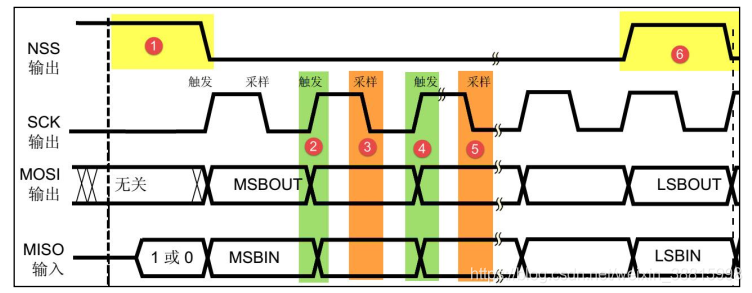
图1-2 SPI通讯时序
这个时序还是比较好分析的,1编号属于起始信号,也就是选择片选;和IIC相同,我们需要定义数据改变和数据保持的时刻,如图上的2、4属于准备数据,3、5属于数据保持以及数据交换的时刻,但是SPI提供四种数据交换的模式,主要是为了兼容不同的器件,只要对应设置就行。CPOL/CPHA 及通讯模式。(其实所有的通讯协议都一样,没有对错,只要统一就行)
CPOL和CPHA设置是独立的,其中CPOL决定了“时钟极性”,也就是空闲状态SCK的电平,所谓的空闲状态就是没有数据交互,没有从设备被选中,NSS属于高电平的时刻。图1-2显然时钟极性是低,也就是说CPOL为0;
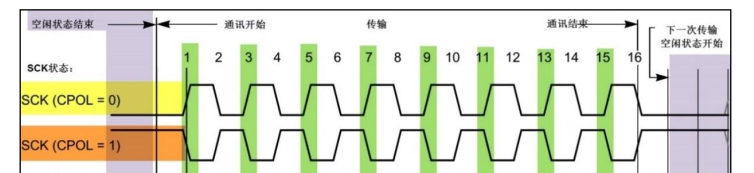
图1-3 CPOL对应时钟极性
CPHA决定采样边缘,为0就是再奇数边缘采样(从1算起),为1从偶数边缘采样。
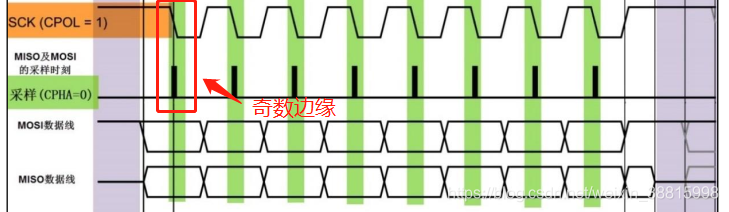
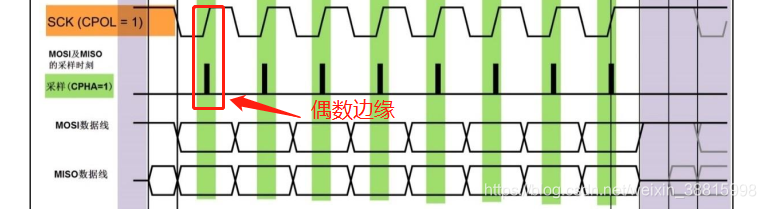
图1-4 CPHA对应采样边缘
这个和我们平常去定义下降沿上升沿采样习惯不一样,单最终来说都是设置采样时刻
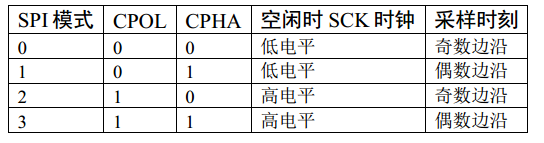
图1-5 SPI四种模式
2. SPI操作W25Q128如何配置以及为什么
学习了SPI相关知识,我们就要根据特定的器件去配置,实现数据交互,如下结合STM32F4库函数开发去配置对应的SPI
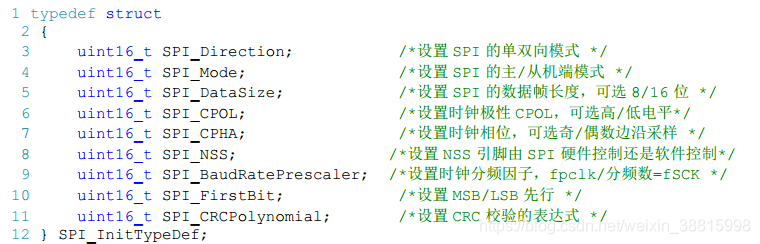
SPI_Init初始化结构体,我就省略了GPIO以及复用功能的初始化了。
首先SPI_Direction我们需要对FLASH进行读写,选择全双工的模式,同时选择主机模式和八位数据位
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构下面比较有选择困难的就是时钟极性以及采样边沿的选择了,这个我们就必须查看W25Q128数据手册了
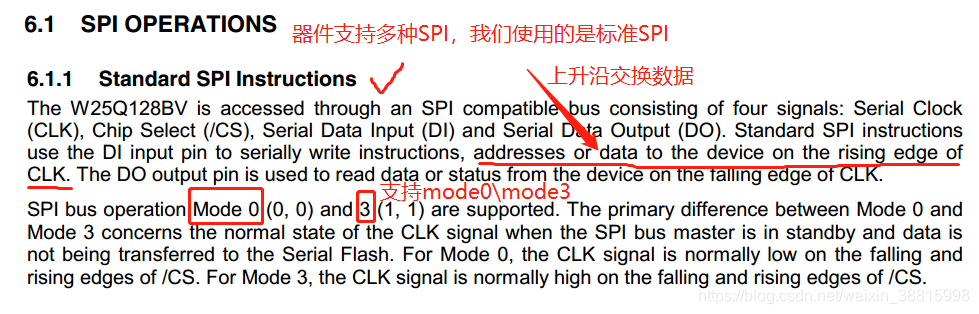
根据之前的表格,我们可以设置CPOL=0,CPHA=0或者CPOL=1,CPHA=1即可。(博主设置为(0, 0)读取不了,不知道为什么)
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行同步时钟的空闲状态为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //串行同步时钟的第二个跳变沿(上升或下降)数据被采样NSS我们为了方便控制逻辑,选择软件控制,就好像控制LED一样即可,控制逻辑需要软件实现
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制SPI时钟速度,时钟决定了通讯速度,STM32 SPI速度决定于外设挂载的时钟线速度(APB1、APB2),其中APB1 42M, APB2 84M;同时也和分频因子有关,选择的是SPI1挂载在APB2,同时这个速度选择遵从短板效应,由最低速度的设备决定。我们看看W25Q128支持速度如何:
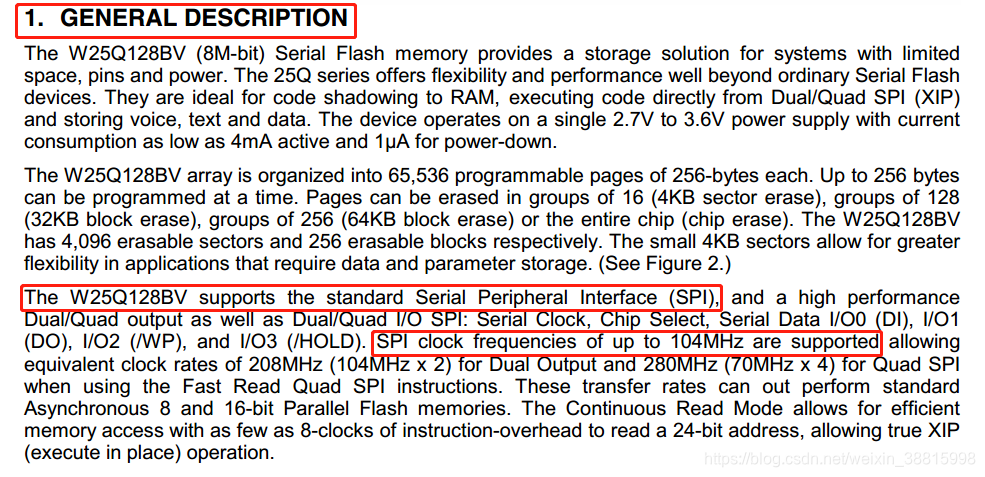
支持104MHZ,大大大于我们STM32 SPI外设最高速度
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2; //定义波特率预分频的值:波特率预分频值为2数据传输顺序,这个也需要查看数据手册才能确定,当然,你也可以随便,只要系统统一,高位优先写进去就得高位优先读出来(博主做过实验,对于自身写的数据是没问题,但是对于常数,设备ID就会出现问题,还得自己转换,还是别这样搞,乖乖看数据手册)

对于奇偶校验的话,我们只需要设置大于1的值即可。
配置好SPI我们应该就可以传输一些数据了,首先应该去看看读出的ID是否正确,如果ID都不正确就说明配置出问题了,后面的写入数据读出数据就肯定不行了。SPI操作FLASH只要遵从数据手册的逻辑顺序就行了,和之前的AT24C02分析过程差不多,就是写入操作命令,写入地址,写入数据,都有一套标准的操作流程,不过需要注意,写是需要擦除以及自行换页的,读是可以直接读取,自动换页。
3. FLASH写入前为什么需要擦除
Flash 的编程原理都是只能将 1 写为 0,而不能将 0 写为 1。所以在 Flash 编程之前,必须将对应的块擦除,而擦除的过程就是把所有位都写为 1 的过程,块内的所有字节变为 0xFF
4.代码下载
https://github.com/oraSC/STM32-course/tree/master/SPI/SPI%E6%93%8D%E4%BD%9CW25Q128

















 573
573

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









