







 本文详细介绍了双复合摆的运动方程推导,分别采用牛顿法和拉格朗日法。在牛顿法中,详细讨论了双摆的模型参数、运动方程、反作用力方程,并通过MATLAB进行计算验证。在拉格朗日法部分,阐述了动能与势能的概念,推导了欧拉拉格朗日运动方程,并最终解耦出摆角加速度。所有理论推导与Simscape Multibody模型进行了对比,确保了理论的准确性。
本文详细介绍了双复合摆的运动方程推导,分别采用牛顿法和拉格朗日法。在牛顿法中,详细讨论了双摆的模型参数、运动方程、反作用力方程,并通过MATLAB进行计算验证。在拉格朗日法部分,阐述了动能与势能的概念,推导了欧拉拉格朗日运动方程,并最终解耦出摆角加速度。所有理论推导与Simscape Multibody模型进行了对比,确保了理论的准确性。
一、双摆运动方程的牛顿法推导
0、前言
在此示例中,我们将导出并实现双复合摆的运动方程【在重力和粘性力作用下的双摆运动】。 具体来说,我们将要:
(1)使用牛顿法推导运动方程;(2)推导施加到摆杆上的反作用力。
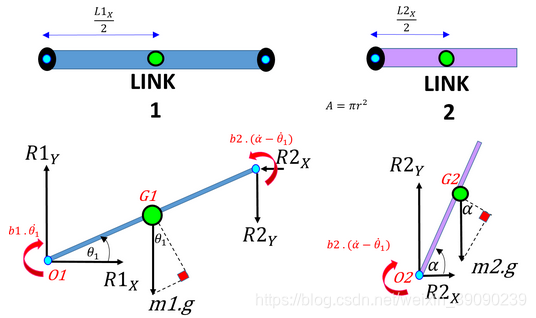
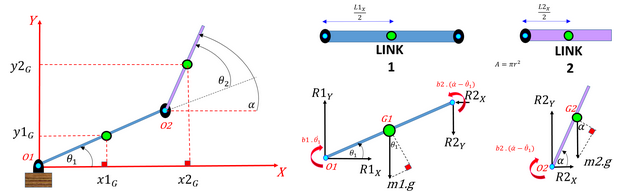
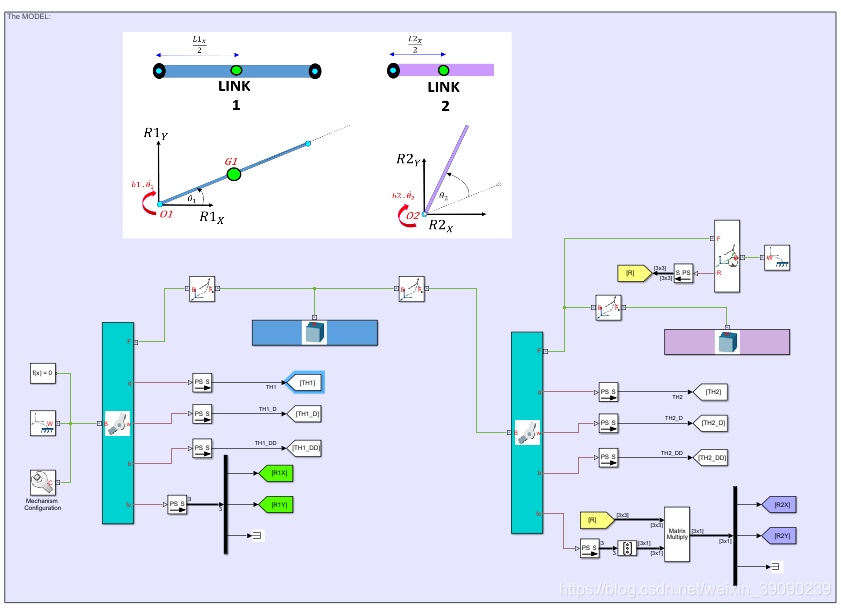
1、定义link1和link2的模型参数

syms L1X_s L2X_s
syms m1_s m2_s
syms t
syms theta1(t) TH1_s TH1D_s TH1DD_s
syms alpha(t) ALP_s ALPD_s ALPDD_s2、运动方程
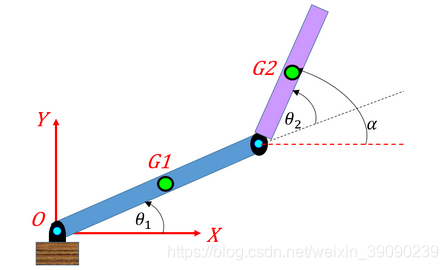
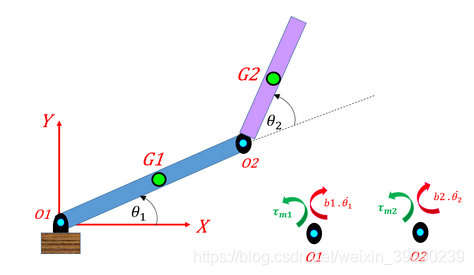
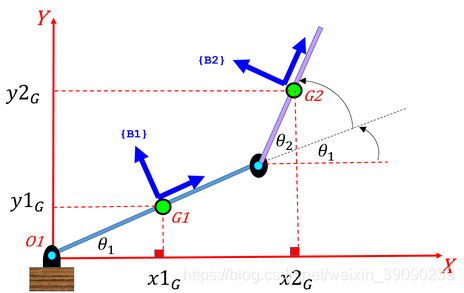
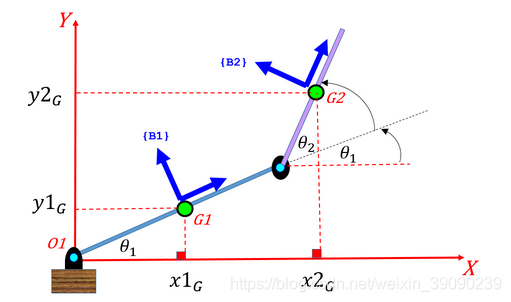
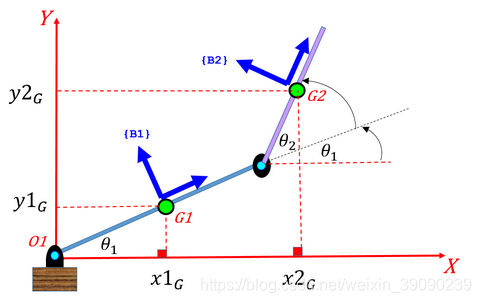
接下来,我们应用牛顿第二定律,并推导该系统的动态运动方程。 我们将假定每个枢轴点都会有粘性阻尼。 下面显示系统图-重力沿负Y方向起作用。
3、link2运动和反作用力方程
取关于link2 的质心的力矩总和:
![]()
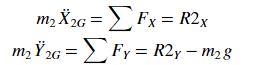
还考虑作用在质心(固定坐标系)X方向和Y方向上的力:【link2质心位置x2G,y2G;可得到速度和加速度】
现在,让我们使用MATLAB定义一些表达式后用于计算:![]()
定义:![]()
X2_G = L1X_s*cos(theta1) + (L2X_s/2)*cos(alpha);%质心在X方向上的位置分量
X2_G_d = diff(X2_G, t) %质心速度X方向
X2_G_dd = diff(X2_G, t, 2)%质心加速度X方向定义:![]()
Y2_G = L1X_s*sin(theta1) + (L2X_s/2)*sin(alpha);%质心在Y方向上的位置分量
Y2_G_d = diff(Y2_G, t) %质心速度Y方向
Y2_G_dd = diff(Y2_G, t, 2) %质心加速度Y方向现在计算得到:![]() ,根据如下公式。
,根据如下公式。
R2_X = m2_s*X2_G_dd;
R2_Y = m2_s*Y2_G_dd + m2_s*9.81;然后将SYMFUN转换为SYMS
THE_R2_X = formula(R2_X); % R2_X(t);
THE_R2_Y = formula(R2_Y); % R2_Y(t);进行一些变量替换:
our_OLD_list_1 = [theta1, diff(theta1,1), diff(theta1, 2)];
our_new_list_1 = [ TH1_s, TH1D_s, TH1DD_s];
our_OLD_list_2 = [alpha, diff(alpha,1), diff(alpha, 2)];
our_new_list_2 = [ALP_s, ALPD_s, ALPDD_s];
THE_R2_X = subs( THE_R2_X, [our_OLD_list_1, our_OLD_list_2], ...
[our_new_list_1, our_new_list_2]);
THE_R2_Y = subs( THE_R2_Y, [our_OLD_list_1, our_OLD_list_2], ...
[our_new_list_1, our_new_list_2]);
RESULT_THE_R2_X = THE_R2_X;
RESULT_THE_R2_Y = THE_R2_Y;
4、Link1运动和反作用力方程
取绕枢轴点O1的力矩之和:
![]()
还考虑作用在惯性(固定坐标系)X方向和Y方向上的力:
当查看Link1的受力图时,会看到R2力的作用。 正是这些R2力提供了“连接”两个link运动的约束。 使用“约束”一词,因为R2力是函数![]()
定义下面的表达式用于计算:![]()
X1_G = (L1X_s/2)*cos(theta1);
X1_G_d = diff(X1_G, t);
X1_G_dd = diff(X1_G, t, 2);
Y1_G = (L1X_s/2)*sin(theta1);
Y1_G_d = diff(Y1_G, t);
Y1_G_dd = diff(Y1_G, t, 2); 计算![]()
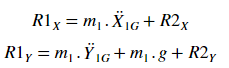
syms R2X_s R2Y_s
R1_X = m1_s*X1_G_dd + R2X_s;
R1_Y = m1_s*Y1_G_dd + R2Y_s + m1_s*9.81;然后将SYMFUN转换为SYMS,
THE_R1_X = formula(R1_X); % R1_X(t);
THE_R1_Y = formula(R1_Y); % R1_Y(t);进行一些变量替换:
our_OLD_list_1 = [theta1, diff(theta1,1), diff(theta1, 2)];
our_new_list_1 = [ TH1_s, TH1D_s, TH1DD_s];
THE_R1_X = subs( THE_R1_X, [our_OLD_list_1], ...
[our_new_list_1])
THE_R1_Y = subs( THE_R1_Y, [our_OLD_list_1], ...
[our_new_list_1])
RESULT_THE_R1_X = THE_R1_X;
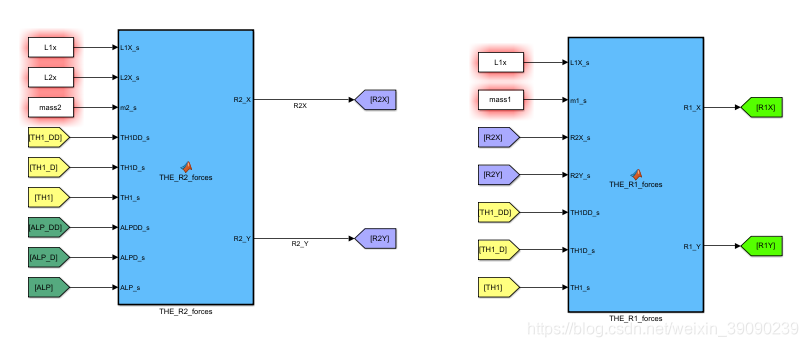
RESULT_THE_R1_Y = THE_R1_Y;创建simulink块R1和R2方程。首先看一下每个方程式内的符号:
symvar( RESULT_THE_R2_X )
symvar( RESULT_THE_R2_Y )
symvar( RESULT_THE_R1_X )
symvar( RESULT_THE_R1_Y )创建:
tf_i_should_create_SL_block = true;
if(true==tf_i_should_create_SL_block)
MODEL_NAME = 'bh_tmp_model_for_newt';
if(4==exist(MODEL_NAME))
close_system(MODEL_NAME, 0);
delete(MODEL_NAME);
end
new_system(MODEL_NAME)
open_system(MODEL_NAME)
% the R1X and R1Y equations
INPUT_VAR_ORDER = {'L1X_s', 'm1_s', 'R2X_s','R2Y_s'...
'TH1DD_s', 'TH1D_s', 'TH1_s'};
matlabFunctionBlock( [MODEL_NAME,'/THE_R1_forces'], ...
RESULT_THE_R1_X, RESULT_THE_R1_Y, ...
'Optimize',false, ...
'Vars', INPUT_VAR_ORDER, ...
'Outputs', {'R1_X','R1_Y'} );
% the R2X and R2Y equations
INPUT_VAR_ORDER = {'L1X_s', 'L2X_s', 'm2_s', ...
'TH1DD_s', 'TH1D_s', 'TH1_s', ...
'ALPDD_s', 'ALPD_s', 'ALP_s'};
matlabFunctionBlock( [MODEL_NAME,'/THE_R2_forces'], ...
RESULT_THE_R2_X, RESULT_THE_R2_Y, ...
'Optimize',false, ...
'Vars', INPUT_VAR_ORDER, ...
'Outputs', {'R2_X','R2_Y'} );
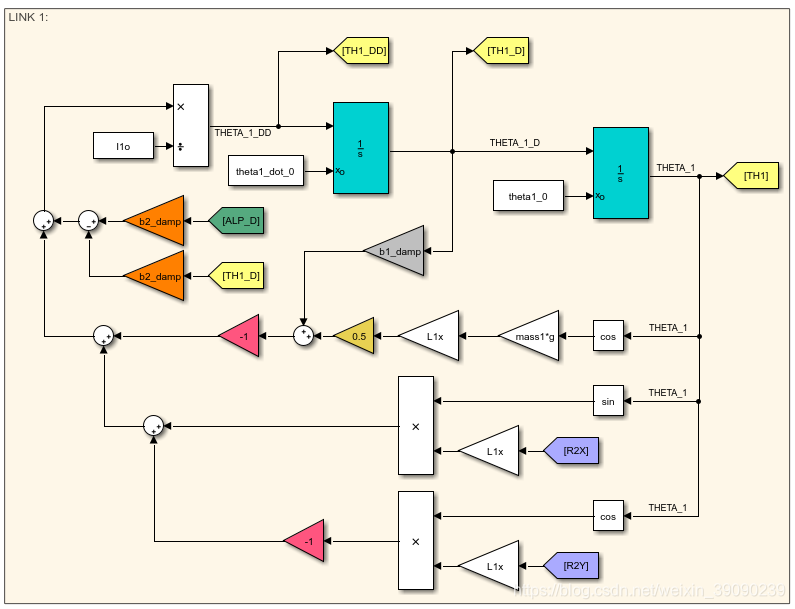
end在此基础构建的simulink模型中构建模型。
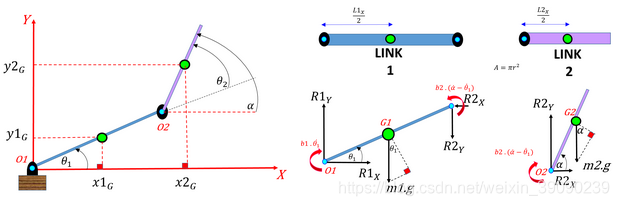
link1取绕枢轴点O1的力矩之和:为了分离出theta1_DD
![]()
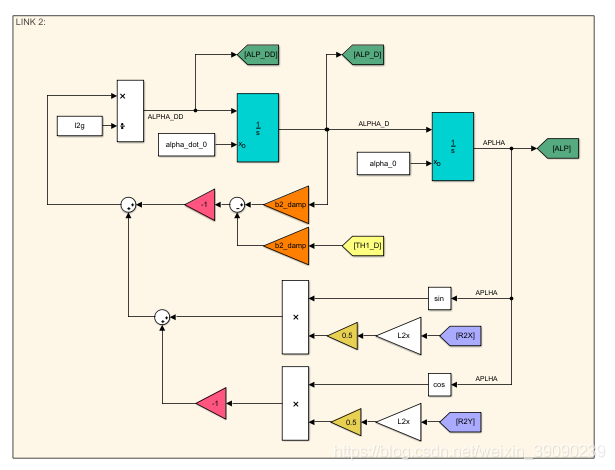
link2取绕枢轴点O2的力矩之和:为了分离出theta2_DD
![]()
初始化一些参数:
density = 1000; % kg/m3
L1x = 1.00; % m
L1y = 0.050; % m
L1z = 0.005; % m
mass1 = density * L1x*L1y*L1z; % kg
I1g = mass1*(L1x^2 + L1y^2)/12;
I1o = I1g + mass1*(L1x/2)^2;
L2x = 0.5; % m
L2y = 0.05; % m
L2z = 0.005; % m
mass2 = density * L2x*L2y*L2z; % kg
I2g = mass2*(L2x^2 + L2y^2)/12;
I2o = I2g + mass2*(L2x/2)^2;
b1_damp = 0.005; %0.1 (N.m/(rad/sec));
b2_damp = 0.005; %0.1 (N.m/(rad/sec));
g = 9.80665; % m/sec^2
theta1_0 = 45*pi/180; % rad
theta1_dot_0 = 0; % rad/sec
theta2_0 = 30*pi/180; % rad
theta2_dot_0 = 0; % rad/sec
alpha_0 = theta1_0 + theta2_0; % rad
alpha_dot_0 = theta1_dot_0 + theta2_dot_0; % rad/sec加载到MATLAB工作区中。除了实现我们的手推运动方程式之外,我们还创建了具有相同两连杆的Simscape Multibody。 推导结果与Simscape模型进行比较,两组结果一致。

simscape模型:
双摆结果:【指定初始位置pose,在重力和粘性阻尼下的双摆运动】
如果加大粘性阻尼:【双摆运动减缓】
%改变粘性阻尼
b1_damp = 0.5; %0.1 (N.m/(rad/sec));
b2_damp = 0.5; %0.1 (N.m/(rad/sec));
二、拉格朗日法推导运动方程:
1、系统方程符号推导
欧拉拉格朗日运动方程:【动能与势能之差】
![]()
![]()
其中q={theta1,theta2}为,Qk为非保守广义力,T为动能,V为势能。
(1)两个link的速度定义
%link参数 质量,重力加速度,转动惯量
syms m2_s m1_s g_s I1G_s I2G_s
syms L1X_s L2X_s
syms b1_s b2_s
syms t theta1(t) TH1_s TH1D_s TH1DD_s
syms theta2(t) TH2_s TH2D_s TH2DD_s
%link1质心位置
X1_G = (L1X_s/2)*cos(theta1(t));
Y1_G = (L1X_s/2)*sin(theta1(t));
%得到link1质心位置速度和加速度【x方向和y方向平移分量】
X1_G_d = diff(X1_G, t);
X1_G_dd = diff(X1_G, t, 2);
Y1_G_d = diff(Y1_G, t);
Y1_G_dd = diff(Y1_G, t, 2);
%link2的质心位置
alpha = theta1(t) + theta2(t);
X2_G = L1X_s*cos(theta1(t)) + (L2X_s/2)*cos(alpha);
Y2_G = L1X_s*sin(theta1(t)) + (L2X_s/2)*sin(alpha);
%得到link2质心位置速度和加速度【x方向和y方向平移分量】
X2_G_d = diff(X2_G, t)
X2_G_dd = diff(X2_G, t, 2);
Y2_G_d = diff(Y2_G, t);
Y2_G_dd = diff(Y2_G, t, 2);(2)定义系统动能【平动动能+旋转动能】
%平动动能;与非平面二自由度双摆处可以对照看看。
KE_trans = 0.5*m1_s*( X1_G_d^2 + Y1_G_d^2) + ...
0.5*m2_s*( X2_G_d^2 + Y2_G_d^2);
%旋转转动动能
theta1_d = diff(theta1, t);
theta2_d = diff(theta2, t);
KE_rot = 0.5*I1G_s*( (theta1_d )^2 ) + ...
0.5*I2G_s*( (theta1_d + theta2_d)^2 );
%总动能
KE = KE_trans + KE_rot;(3)定义系统势能
%系统势能,仅重力
PE = m1_s*g_s*Y1_G + m2_s*g_s*Y2_G;(3)系统拉格朗日算子
L_ORIGINAL = KE - PE;
symvar( L_ORIGINAL )现在,我们要做的就是根据拉格朗日方程式进行一系列偏导计算:
![]()
为了方便获得拉格朗日偏导数,做如下符号集的对应替换。
syms q_1 q_1p q_2 q_2p
L = subs(L_ORIGINAL, [theta1(t), diff(theta1(t),t),...
theta2(t),diff(theta2(t),t)], ...
[ q_1, q_1p, q_2, q_2p]);(4)推导Q1![]()
处理:![]()
dLdq1p = diff(L, q_1p);%dl/dq1p
%替换符号集
dLdq1p = subs(dLdq1p, [ q_1, q_1p, q_2, q_2p], ...
[theta1(t), diff(theta1(t),t), theta2(t), diff(theta2(t),t)]); 处理:![]()
der_dt_of_dLdq1p = diff(dLdq1p, t);处理:![]()
dLdq1 = diff(L, q_1);
%符号替换
dLdq1 = subs(dLdq1, [q_1,q_1p,q_2,q_2p], ...
[theta1(t), diff(theta1(t),t), theta2(t), diff(theta2(t),t)]);目前为止第一个运动方程:![]()
syms Q1_s
EOM_TH1_LHS = der_dt_of_dLdq1p - dLdq1;
EOM_TH1_LHS = simplify(EOM_TH1_LHS);
EOM_TH1_RHS = Q1_s;
EOM_TH1 = EOM_TH1_LHS == EOM_TH1_RHS;
%简化表达式
simplify(EOM_TH1)(5)推导Q2:
同上Q1的过程:
%符号替换同上
L = subs(L_ORIGINAL, [theta1(t), diff(theta1(t),t),...
theta2(t), diff(theta2(t),t)], ...
[q_1, q_1p, q_2, q_2p]);处理:![]()
dLdq2p = diff(L, q_2p);
dLdq2p = subs(dLdq2p, [q_1,q_1p,q_2,q_2p], ...
[theta1(t), diff(theta1(t),t), theta2(t), diff(theta2(t),t)]); 处理:![]()
der_dt_of_dLdq2p = diff(dLdq2p, t);处理:![]()
dLdq2 = diff(L, q_2);
%替换符号
dLdq2 = subs(dLdq2, [q_1,q_1p,q_2,q_2p], ...
[theta1(t), diff(theta1(t),t), theta2(t), diff(theta2(t),t)]);到此第二次运动方程:![]()
syms Q2_s
EOM_TH2_LHS = der_dt_of_dLdq2p - dLdq2;
EOM_TH2_LHS = simplify( EOM_TH2_LHS );
EOM_TH2_RHS = Q2_s;
EOM_TH2 = EOM_TH2_LHS == EOM_TH2_RHS;
simplify(EOM_TH2)(5)解耦theta1_DD和theta2_DD
我们可以通过将两个方程都发送到solve()中来解耦方程,分离出两个加速度。 首先,让我们将EOLD表达式(变量的HOLDER列表)替换为EOM表达式:
our_OLD_list_1 = [theta1, diff(theta1,1), diff(theta1, 2)];
our_new_list_1 = [ TH1_s, TH1D_s, TH1DD_s];
our_OLD_list_2 = [theta2, diff(theta2,1), diff(theta2, 2)];
our_new_list_2 = [ TH2_s, TH2D_s, TH2DD_s];
EOM_TH1 = subs(EOM_TH1, [our_OLD_list_1, our_OLD_list_2], ...
[our_new_list_1, our_new_list_2]);
EOM_TH2 = subs(EOM_TH2, [our_OLD_list_1, our_OLD_list_2], ...
[our_new_list_1, our_new_list_2]); 进行分离:
S = solve([EOM_TH1, EOM_TH2],[TH1DD_s, TH2DD_s]);
RESULT_TH1 = S.TH1DD_s;
RESULT_TH2 = S.TH2DD_s;(6)生成simulink块。得到theta1_DD和theta2_DD。
tf_i_should_create_SL_block = true;
if(true==tf_i_should_create_SL_block)
MODEL_NAME = 'bh_tmp_model_for_lagr';
if(4==exist(MODEL_NAME))
close_system(MODEL_NAME, 0);
delete(MODEL_NAME);
end
new_system(MODEL_NAME)
open_system(MODEL_NAME)
% define the INPUT variable order - this is optional
INPUT_VAR_ORDER = { 'I1G_s', 'I2G_s', ...
'L1X_s', 'L2X_s', 'g_s', 'm1_s', 'm2_s', ...
'TH1D_s', 'TH1_s', ...
'TH2D_s', 'TH2_s', ...
'Q1_s', 'Q2_s'};
% Put BOTH equations into one block
matlabFunctionBlock( [MODEL_NAME,'/THE_THETA_SYS_DD'], RESULT_TH1, RESULT_TH2, ...
'Optimize', false, ...
'Vars', INPUT_VAR_ORDER, ...
'Outputs', {'theta1_DD', 'theta2_DD'} );
end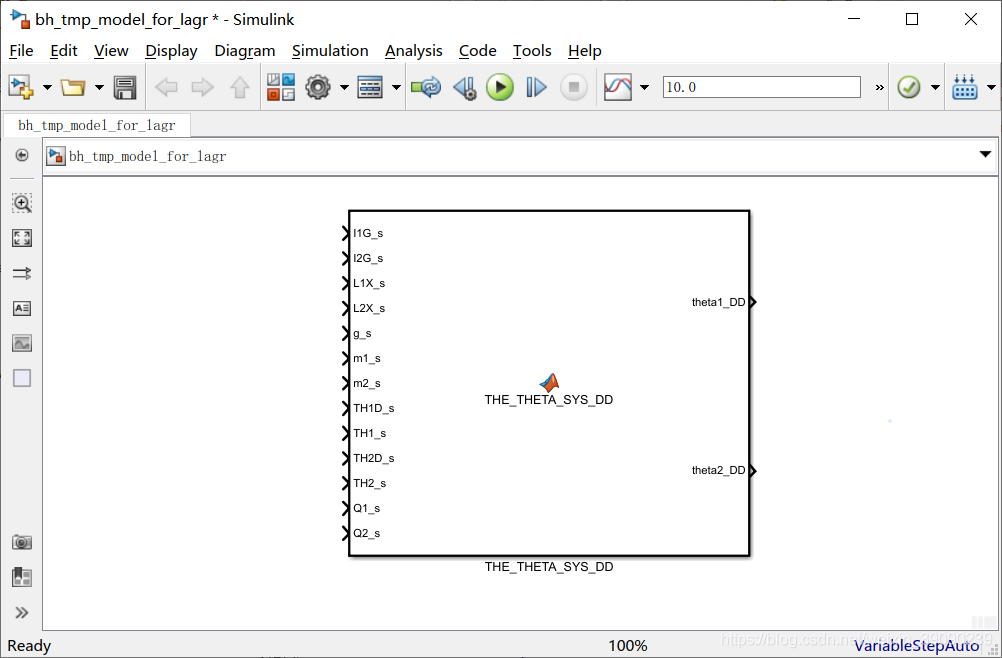
在此基础上完善simulink模型:【Q1和Q2为非保守力,这里主要是粘性力。在双摆过程中因为重力为保守力做功时与动能相互转换】
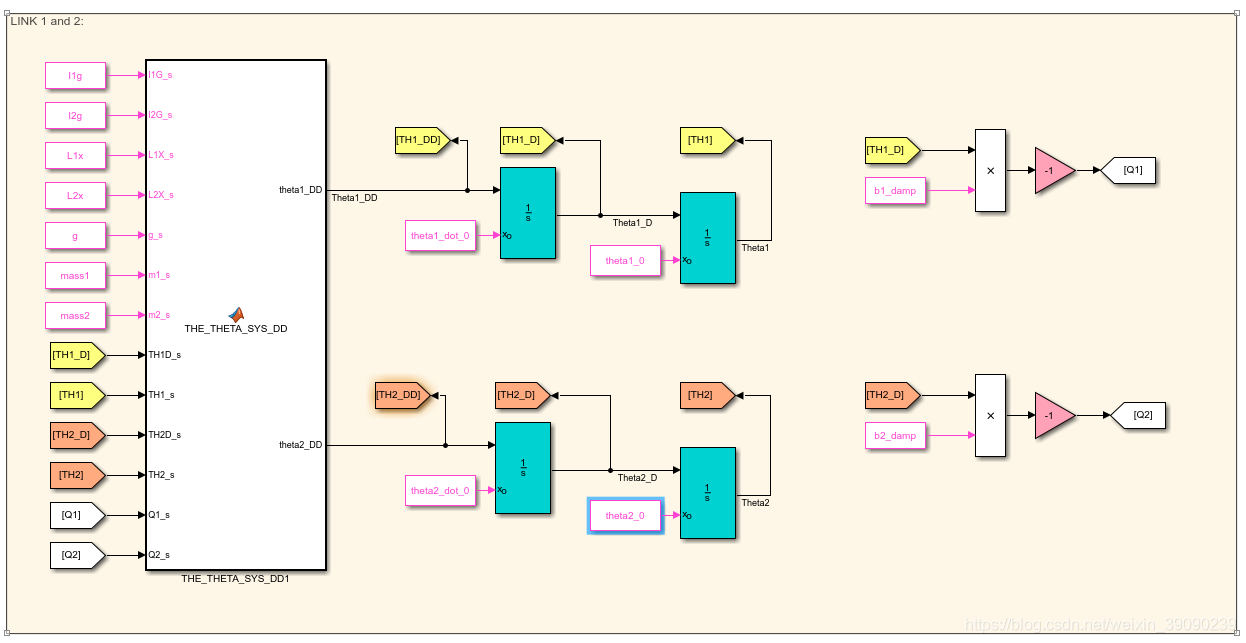
初始化模型参数同上:
density = 1000; % kg/m3
L1x = 1.00; % m
L1y = 0.050; % m
L1z = 0.005; % m
mass1 = density * L1x*L1y*L1z; % kg
I1g = mass1*(L1x^2 + L1y^2)/12;
I1o = I1g + mass1*(L1x/2)^2;
L2x = 0.5; % m
L2y = 0.05; % m
L2z = 0.005; % m
mass2 = density * L2x*L2y*L2z; % kg
I2g = mass2*(L2x^2 + L2y^2)/12;
I2o = I2g + mass2*(L2x/2)^2;
b1_damp = 0.005; %0.1 (N.m/(rad/sec));
b2_damp = 0.005; %0.1 (N.m/(rad/sec));
g = 9.80665; % m/sec^2
theta1_0 = 45*pi/180; % rad
theta1_dot_0 = 0; % rad/sec
theta2_0 = 30*pi/180; % rad
theta2_dot_0 = 0; % rad/sec
alpha_0 = theta1_0 + theta2_0; % rad
alpha_dot_0 = theta1_dot_0 + theta2_dot_0; % rad/sec同样建立simscape模型,对比结果的一致性。


















 1434
1434

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











