









一、概括
这个完全是抄别人的,给我自己看的主要是想当我要看的时候我直接能找到,而不用再去网上搜索,后期会吧代码更新上去。
彻底搞懂“旋转矩阵/欧拉角/四元数”,让你体会三维旋转之美_欧拉角判断动作-CSDN博客
在不同的坐标系中物体的位姿是相对的,任何的坐标系都是相对来说的,那么为什么要坐标系做转换呢?其主要的一个原因是为了更好的测量或者更好的识别。
我们常说的世界坐标系(world ) 也是相对的,我们知道地球绕着太阳转 太阳也在绕这(银河)别的坐标系来旋转,而且是在越来越远离坐标系原点的,所以我们物质的真个世界都是相对的。这个在古代的天干地支中就已经有体现了 。
从小的方面来说我们的导航系统 就是我们在驾驶的时候坐标系中各个物体在切换,坐标系在变换。如:

二、旋转矩阵
为什么要坐标系转换?
简单的说就是为了更好的测量与识别,这是一个从局部到全局(也是相对的)的变换。
坐标系转换需要什么东西?
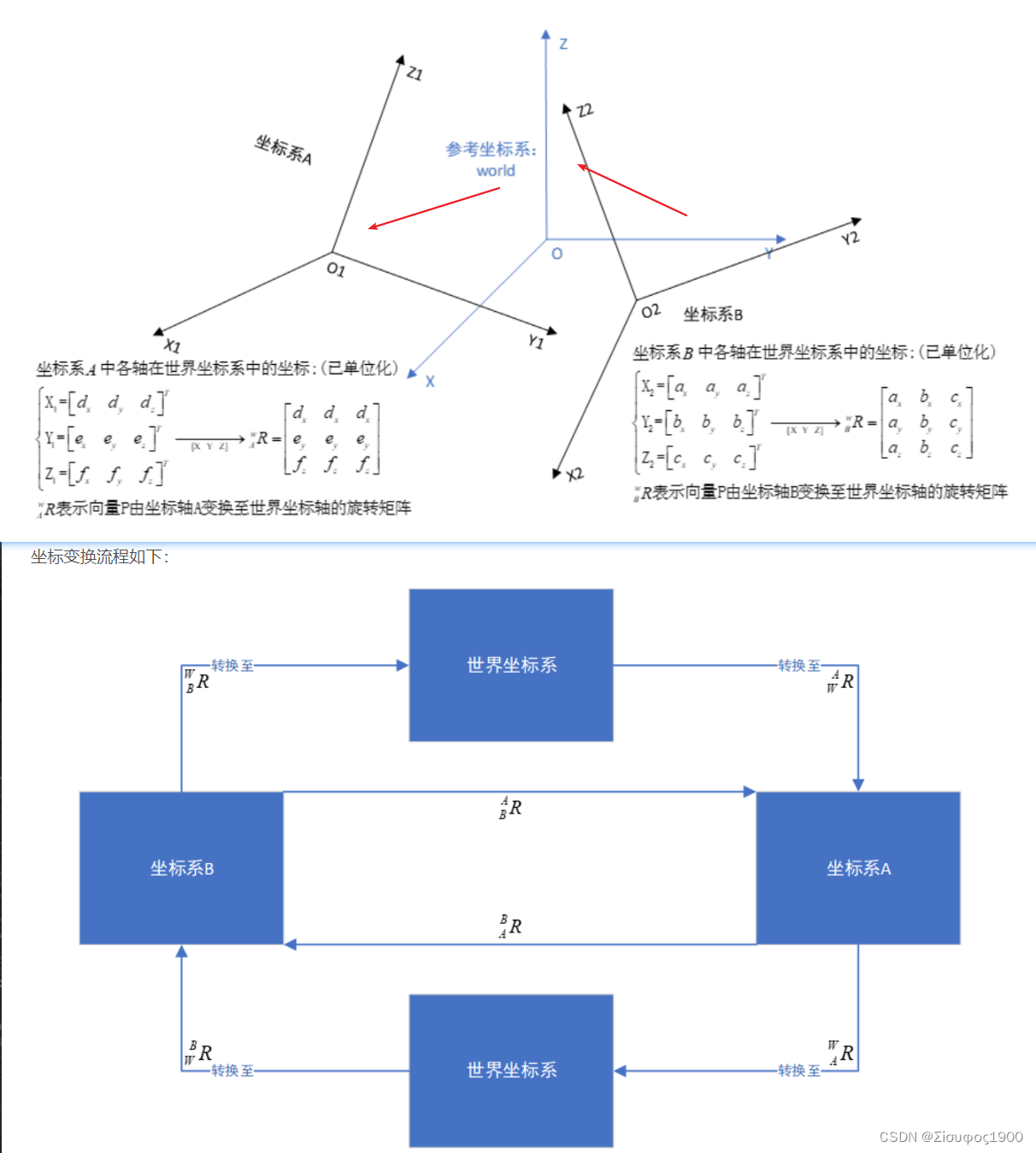
在从一个坐标系到另外一个坐标系的过程中我们需要一个桥梁,那就是世界坐标系,如下:
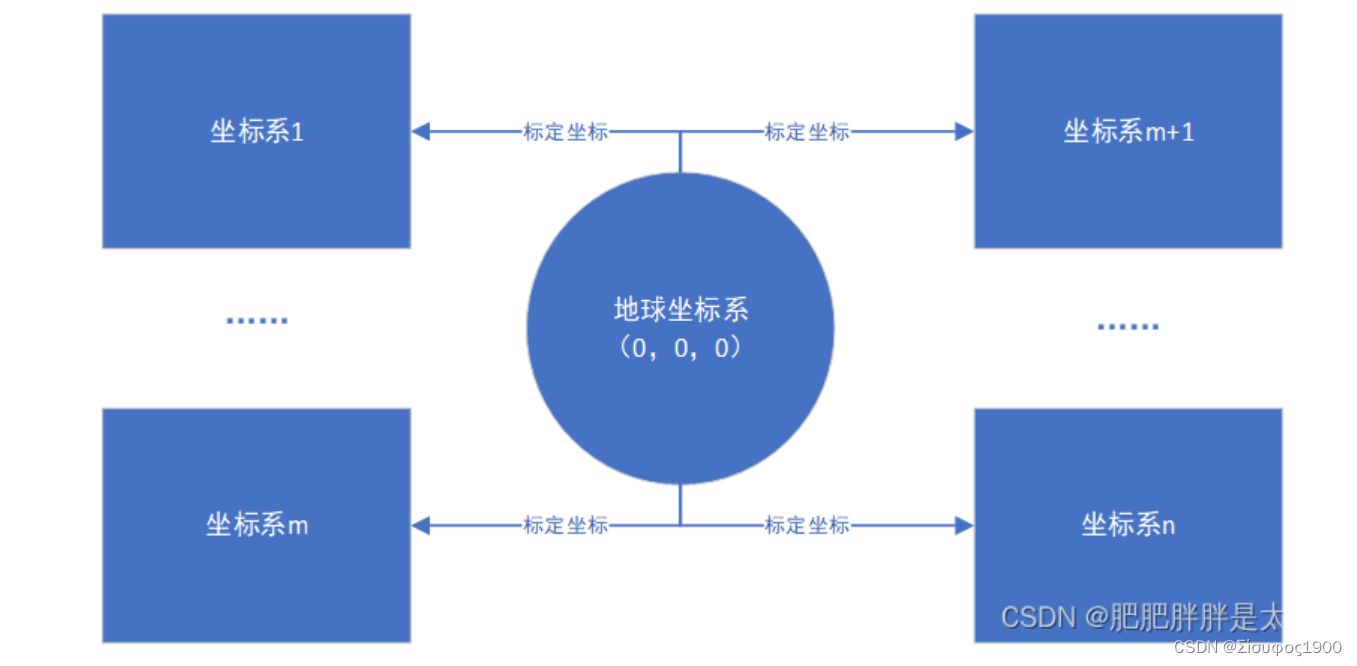
坐标系转换:
从O1 ->O2 坐标系的转换 ,如图:
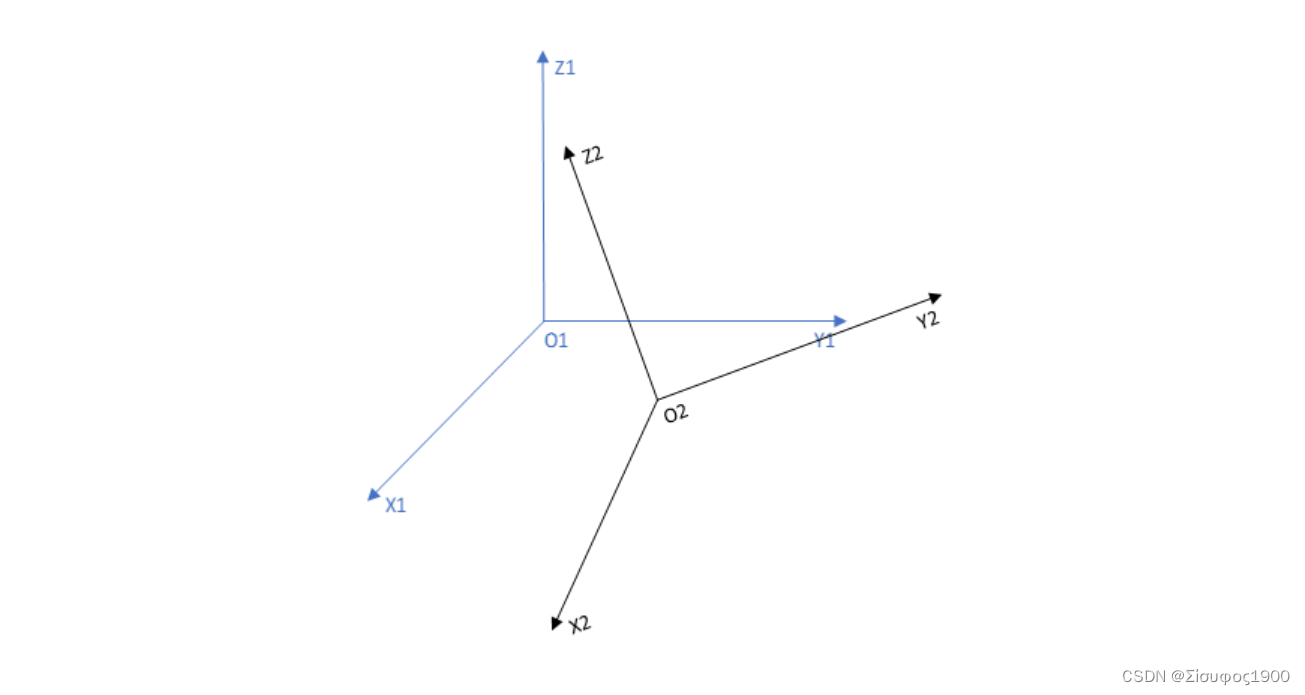
我们可以理解为先平移,然后再旋转

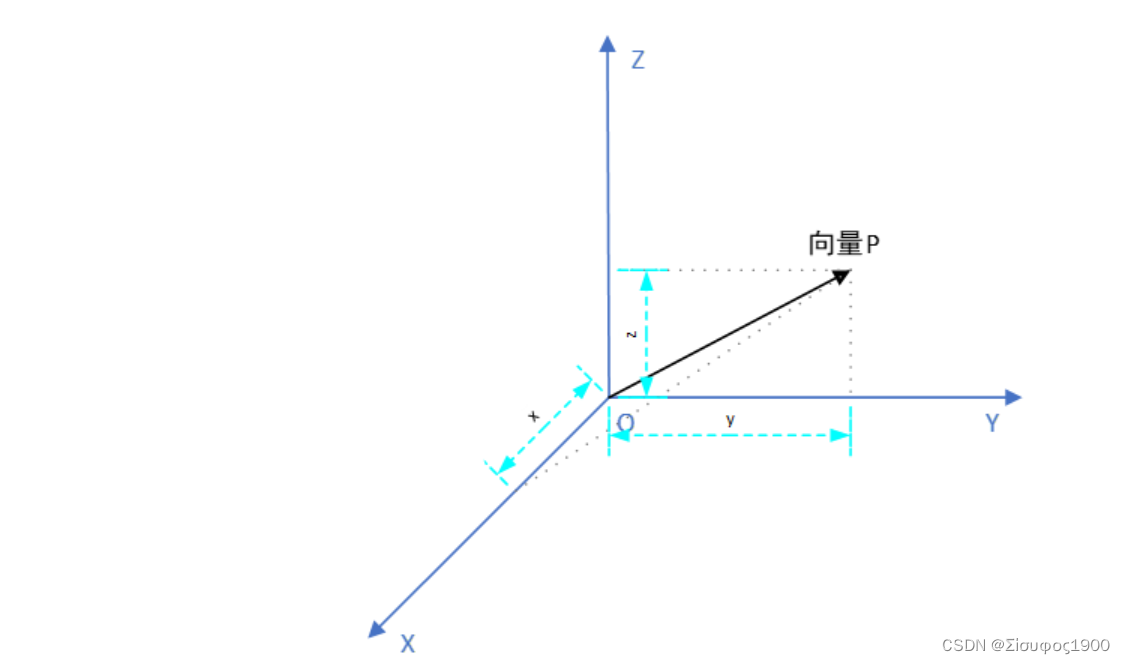
向量分解
我们把一个向量可以分解到三个不同的方向上,其实就是在 X Y Z方向上做投影,
单位向量在坐标系中的投影
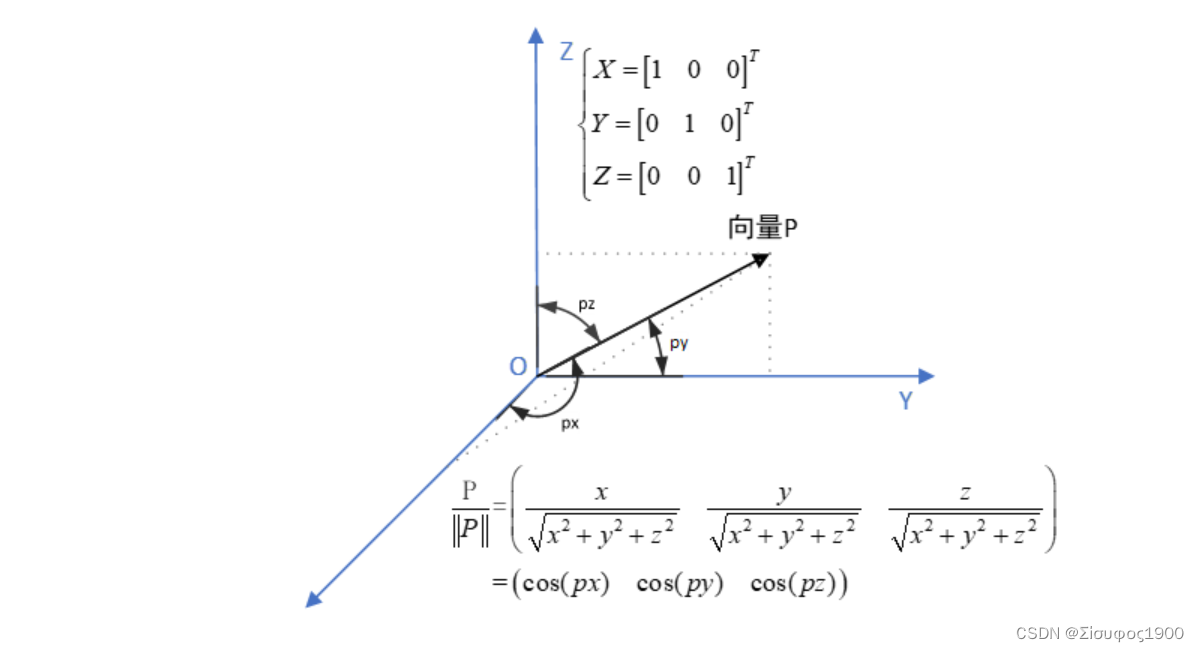
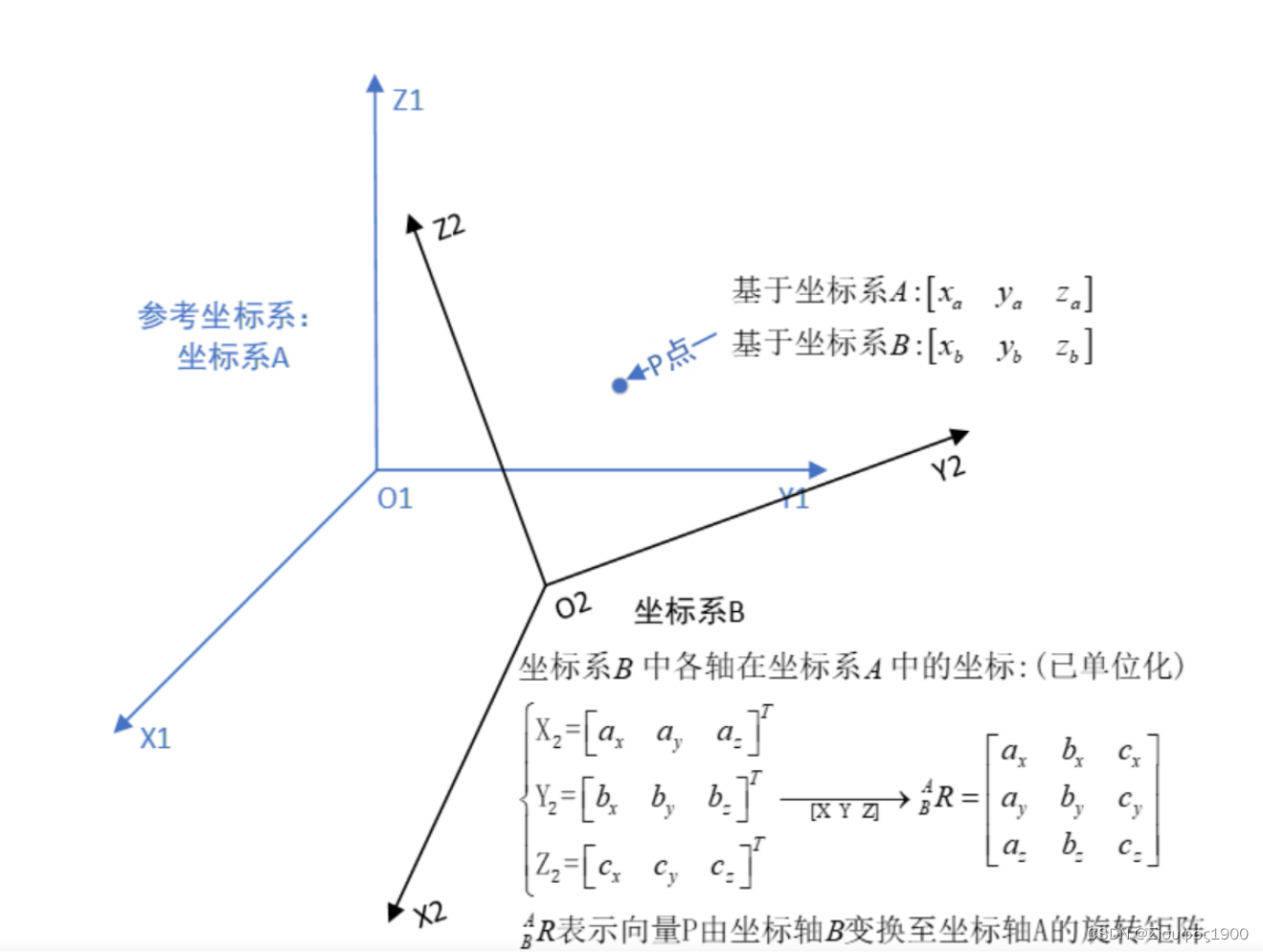
那么 同一个点在不同的坐标系下的坐标是:

P在A 坐标系下的坐标是 {xa ,ya,za}
同理在 B坐标系下的位置 是 {xb ,yb,zb}
那么 我们可以产生一个旋转矩阵 b->b R(表示在b坐标系的点转换到A坐标下的)旋转矩阵
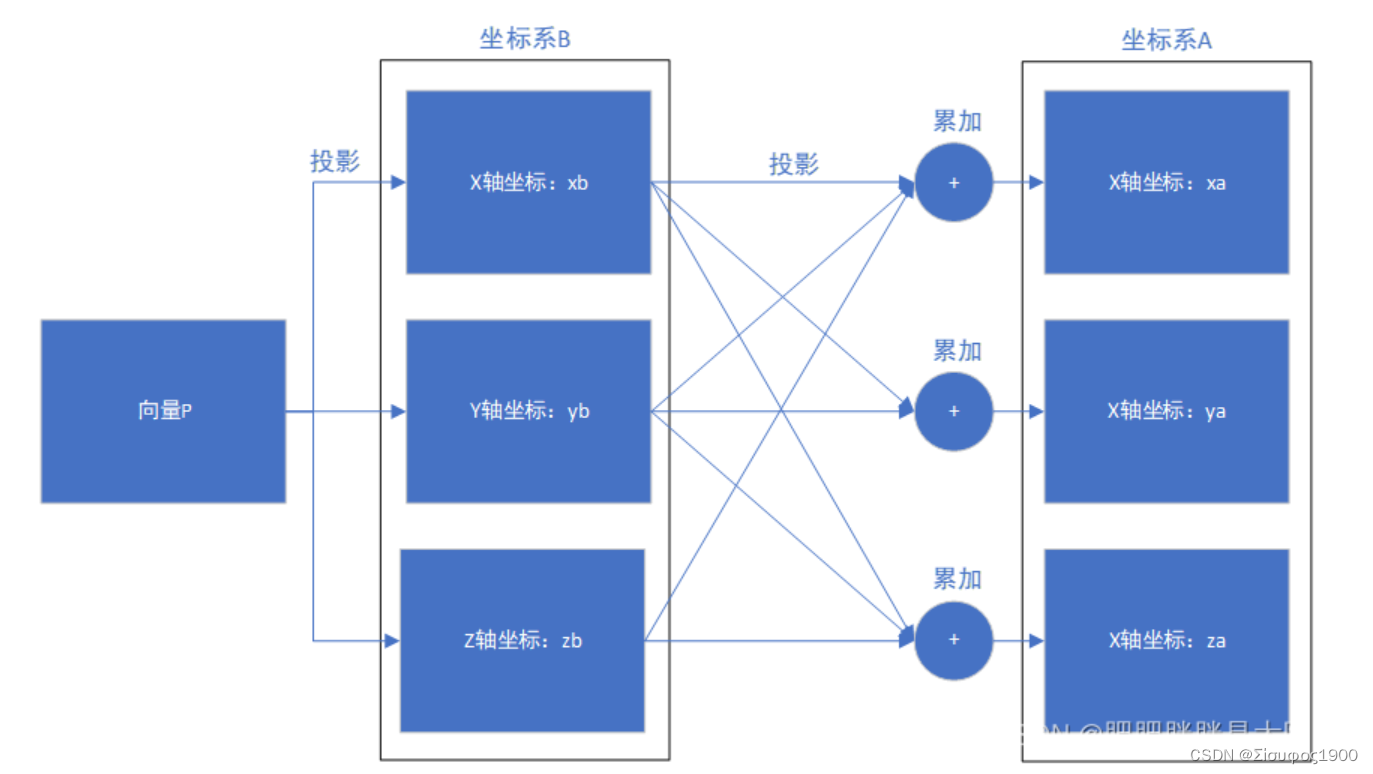
向量坐标的计算无非就是投影,那么向量坐标从坐标系B转换至坐标系A无非就是两次投影而已:

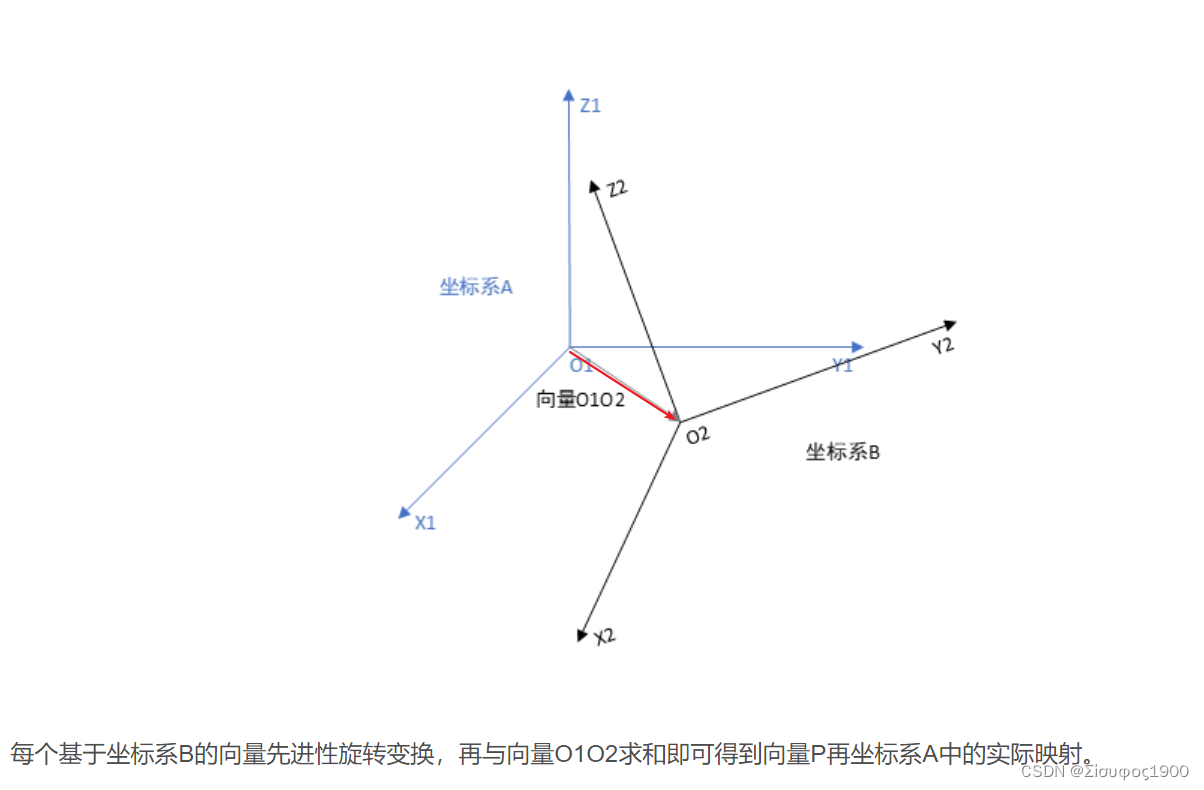
坐标变换中平移的实质
向量可以在坐标系中任意移动,只要不改变向量的方向和大小,向量的属性不会发生变化。但是我们研究的是坐标系B中一个坐标点在坐标系A中的映射,因此需要考虑坐标系B的原点O2相较于坐标系A原点O1平移的距离。
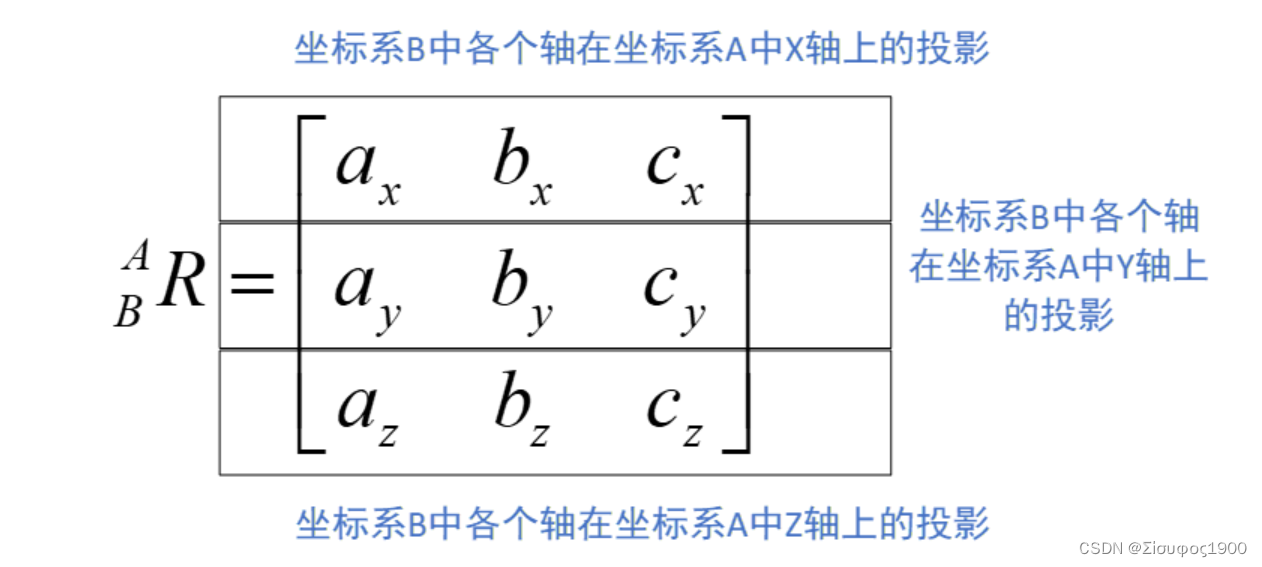
如何计算坐标系B各坐标轴在坐标系A上的投影?(多坐标变换)
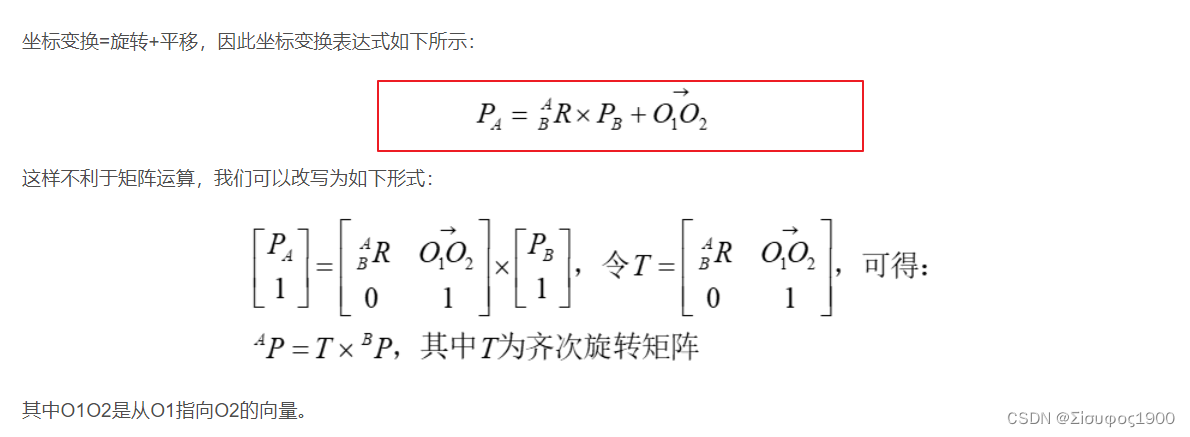
如何实现坐标变换?
有了上面的解释,我们可以计算出一个矩阵:
三、欧拉角
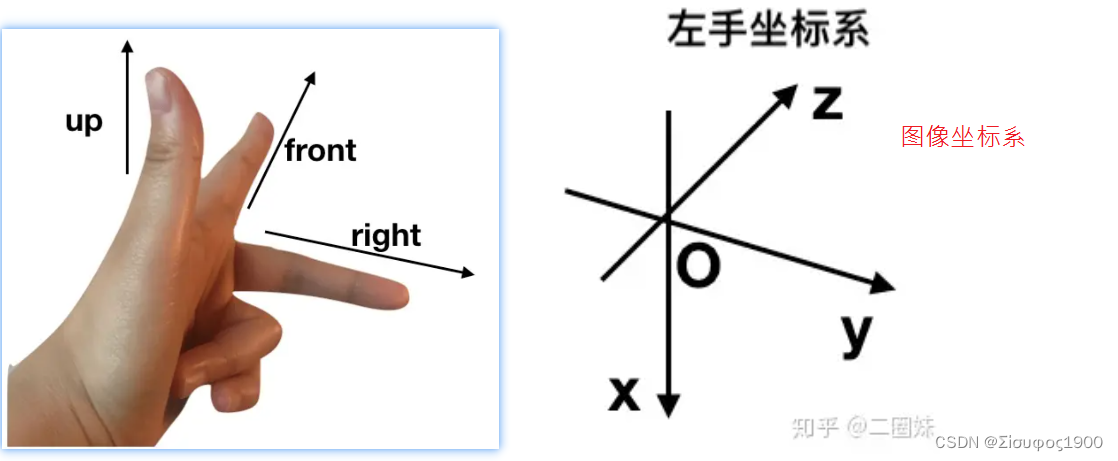
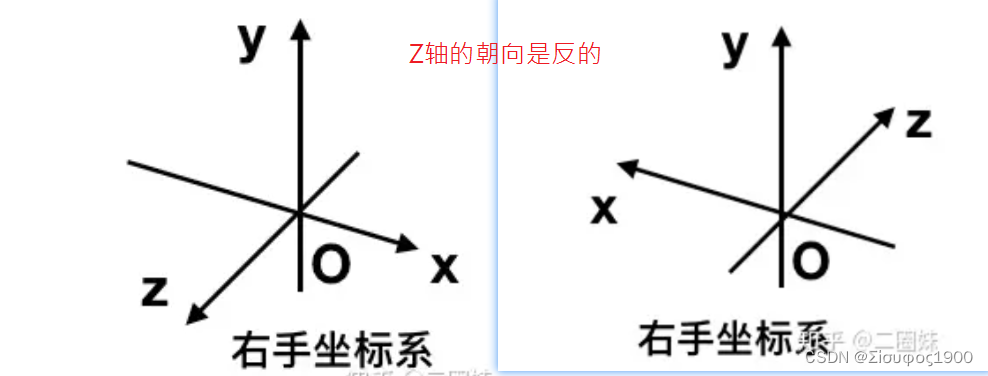
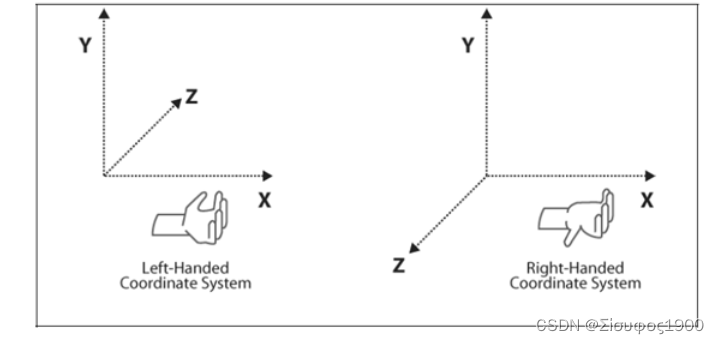
左手 和右手 坐标系
左手坐标系
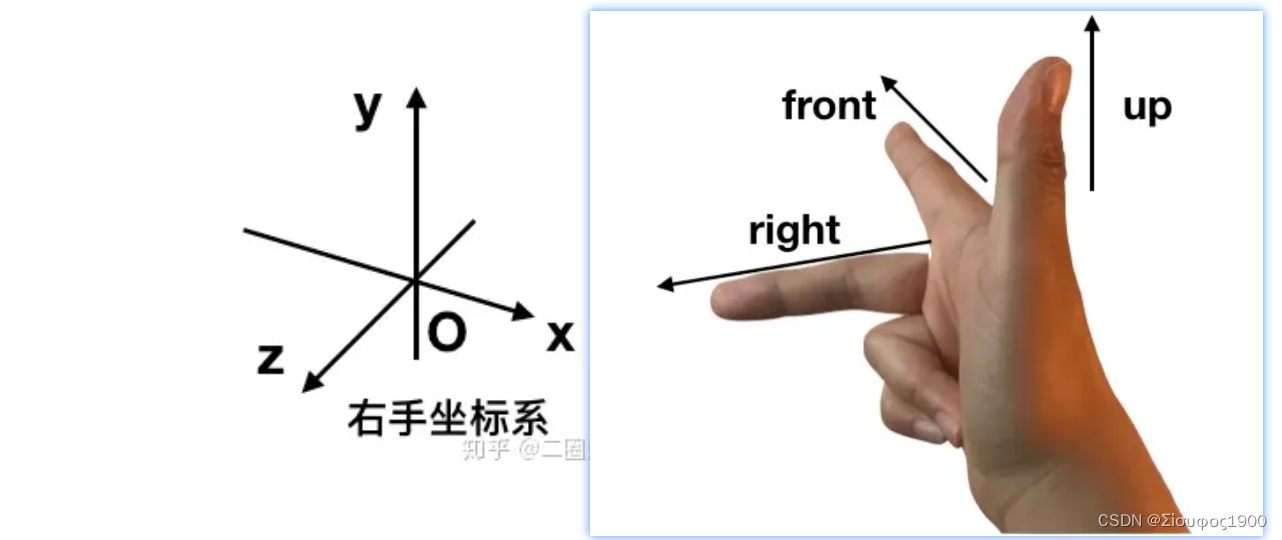
右手坐标系
对比一下:
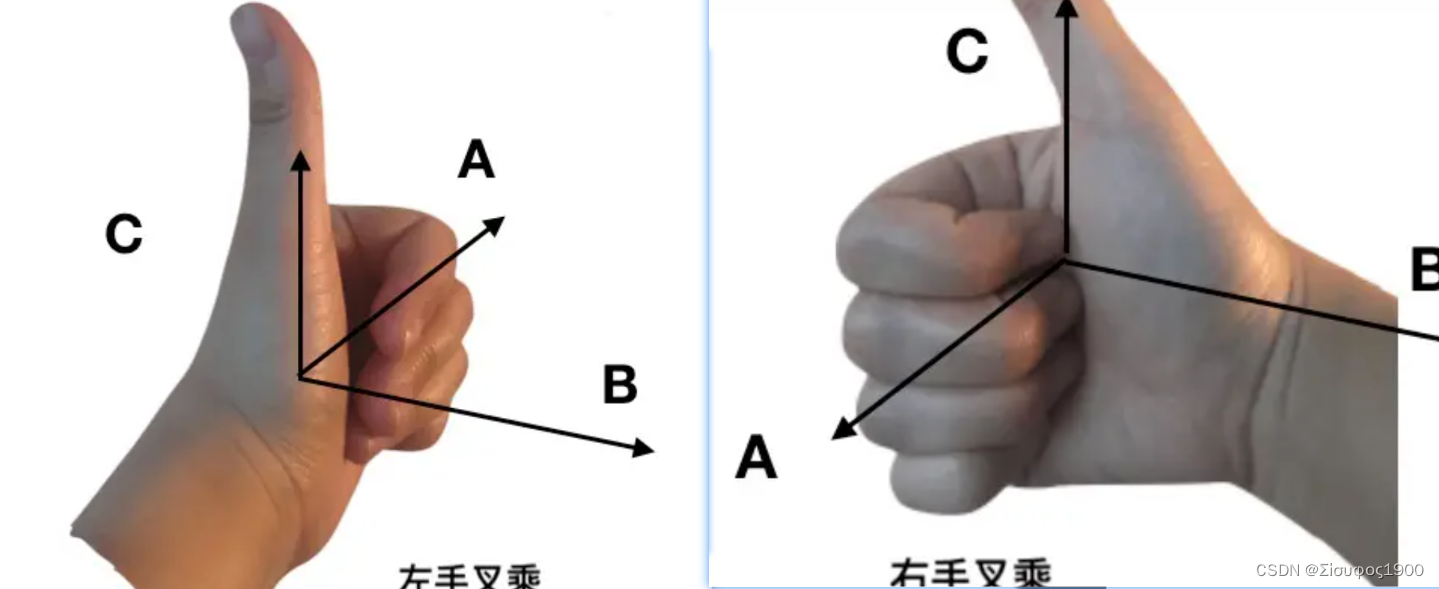
叉乘

Maya 和 OPenGL 使用右手坐标系, DirectX, pbrt, PRMan 使用左手坐标系。
欧拉角
有三个自由度: 偏航(yaw - z) pitch(俯仰-Y) roll (翻滚-x),
一般情况下是按照 Z -Y -X 的顺序来转动的,
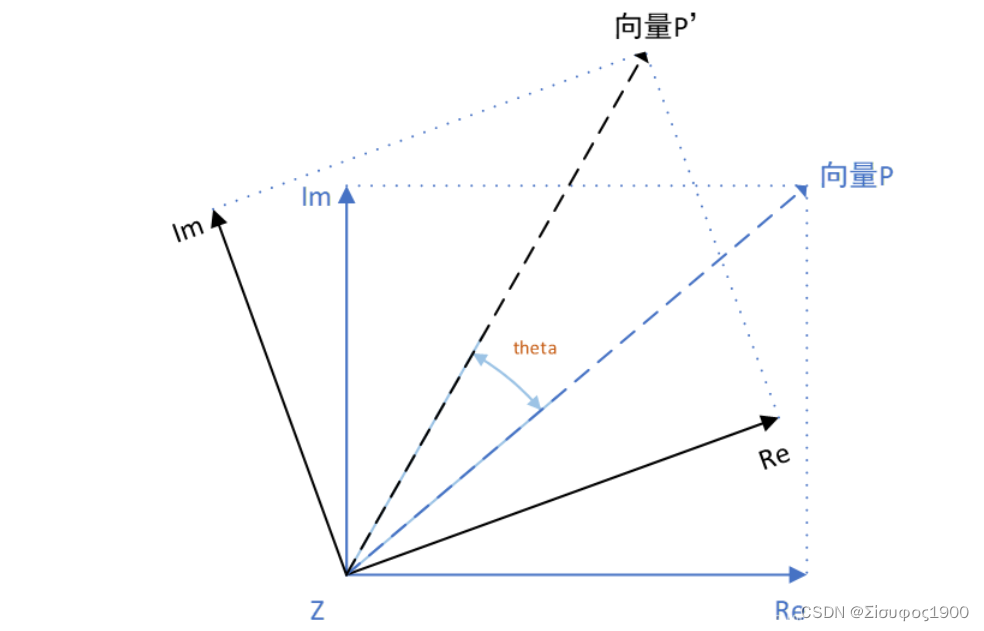
绕Z轴旋转的话,就是XOY面的上点的转动:
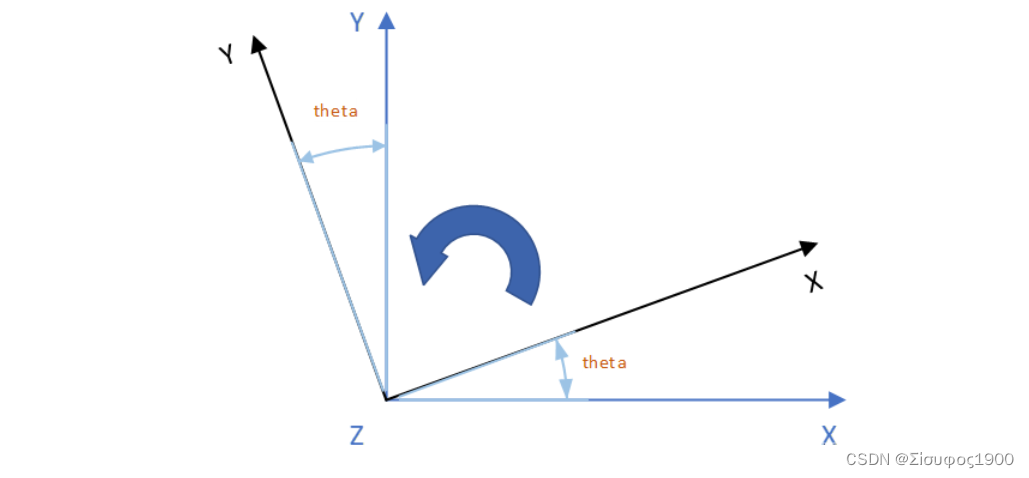
在这个平面上将向量旋转,然后用矩阵的方式来表示:
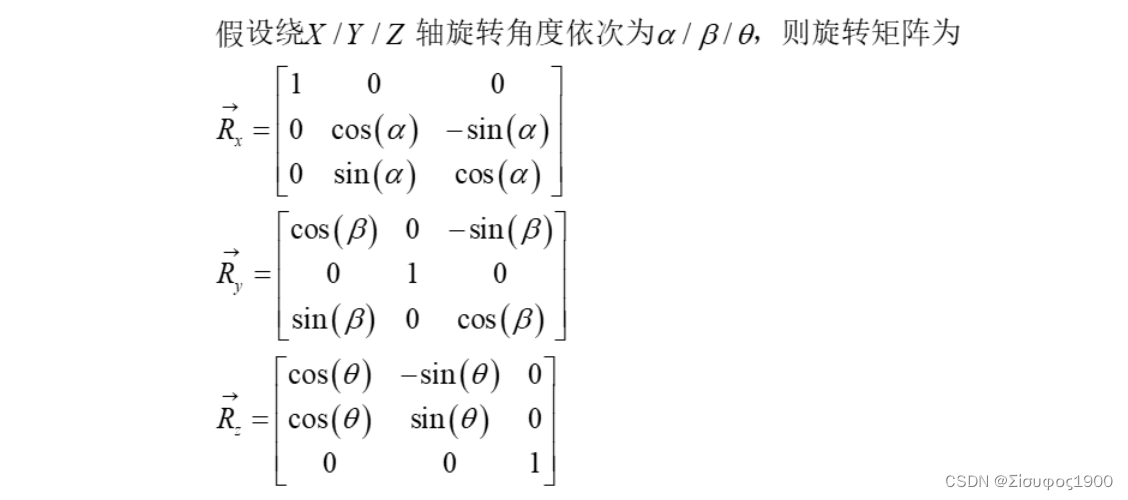
欧拉角转化为旋转矩阵

同理,我们可以按照同样的方式得出到X/Y轴旋转的公式:
外旋(x->y->z)和内旋(z->y->x),我们一般使用外旋的顺序(halcon 里面使用的好像是内旋)
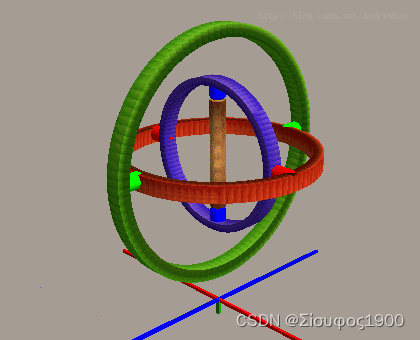
欧拉角的弊端---万向锁
就是当任何一个方向转到90 度的时候会和另外两个自由度中的两个重合,导致会失去一个自由度,然后当我们要使用失去按个自由度的时候,用到了其他的自由度,这就构成了万向锁,如下图:
因此为了解决万向锁的问题,在三个自由度的基础上添加了一个自由度,就是4个自由度---即四元数
四、四元数
四元数的三维表达晦涩难懂,但是四元数的表达式可以优雅的表达三维中的旋转操作,不但避免了欧拉角的死锁问题而且也避免了旋转矩阵的复杂计算。
四元数与旋转矩阵
四元数是一种用于物体旋转的计算方法
三维旋转

向量V围绕着向量U进行三维空间中的旋转操作得到向量V‘,其中向量U为单位向量。现在,我们为了简化向量的旋转操作,分解向量V



四元数的定义

四元数与三维旋转
向量转四元数

三维旋转转四元数

旋转矩阵与四元数

四元数与欧拉角的转化
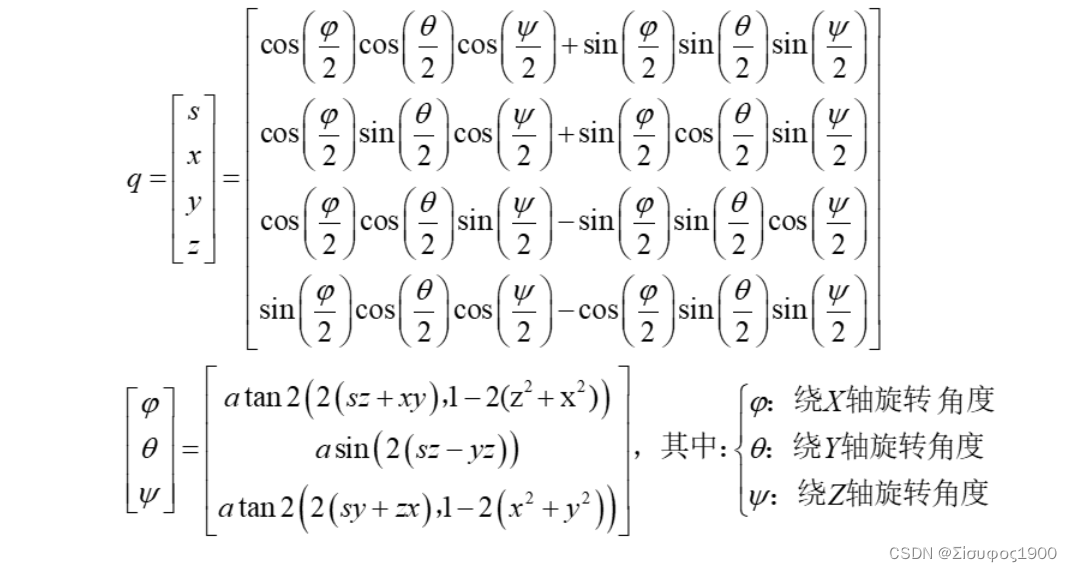
最常用的
代码后面写:














 1999
1999











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









