







项目地址
robotics_tutorial_for_zhihugithub.com1.前言
前面三节我们分别讨论并以最基础的形式实现了PRM、RRT以及人工势场法三种机器人运动规划方法,这三种方法属于机器人运动规划(motion planning)中的路径规划(path planning)方法。
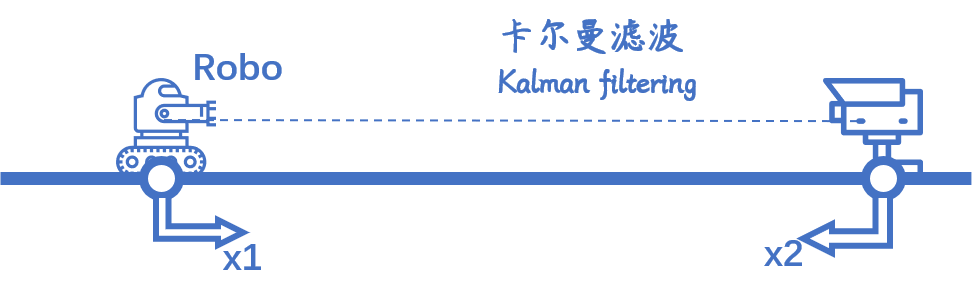
而这一章讲到的卡尔曼滤波方法有什么用呢?举个例子,前面的路径规划方法中,我们总是从当前位置(起始点)开始向目标点进行规划。但在实际应用中,我们要如何确定机器人的当前位置呢?
物理知识告诉我们,物体的位置
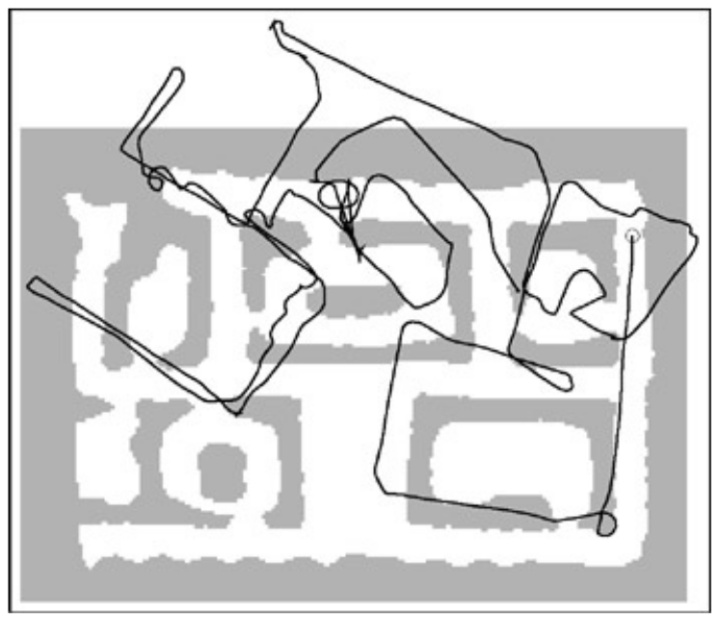
为了校正这种误差,我们通常会引入额外的传感器信息。例如,对上图来说,引入GPS定位信息就是一个不错的选择。这时又出现了问题:速度积分和GPS传感器包含有位置信息,那我们究竟该采信哪边的结果呢?如果两边的信息都不想浪费,该怎么把它们进行融合呢?实际上,无论是速度积分得到的位置信息,还是GPS得到的位置信息,都存在一定的误差(GPS也存在定位精度的问题)。而在机器人的实际应用场景中,可能还存在红外、激光、视觉等更多类型的传感器,都可以以一定精度返回机器人的位置信息。那么我们该如何综合利用这些信息(传感器信息融合)来估计机器人当前的位置信息呢,这里就要用到卡尔曼滤波了。
2.卡尔曼滤波的基本公式
关于卡尔曼滤波的公式及理解,可参考我的另一篇文章:
小明工坊:【传感器融合】扩展卡尔曼滤波的逐步理解与实现(上)zhuanlan.zhihu.com
另外,B站有一则简短的讲解视频:
卡尔曼滤波器的原理www.bilibili.com还有一篇国外的博文图文并茂、十分详尽易懂,当然网上也有许多翻译版本:
How a Kalman filter works, in pictureswww.bzarg.com
强烈建议大家先看完以上资料,这里简要总结其中的结论:
我们用状态向量
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 267
267

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









