






1.背景介绍
机械臂的位置控制是机械臂最重要的功能。机械臂的位置控制精度也是研究者及工程师一直关注的问题。本文梳理下机械臂位置控制的一些发展脉络,帮助大家提高对其的认识以及如何去提升机械臂的位置控制性能。
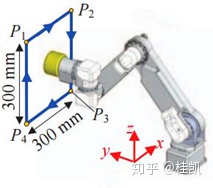
精度衡量:直接测量机械臂末端的位置比较困难,这里采用一种近似的方式,比较机械臂各轴指令角度与实际编码器反馈角度间的偏差值。
2.控制策略
- 三环反馈伺服控制
这种位置控制方式是大家最为熟悉的。此时控制都是在驱动器里完成的,它根据指令位置去生成力矩,让机械臂很好地追上指令位置,而控制器只是一个轨迹规划器,负责发送给驱动器指令位置。
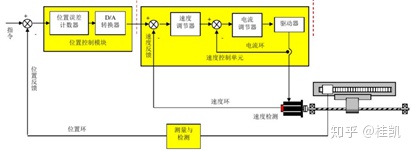
这种方式在稳态时的精度很高,且抗干扰能力强,这可以保证机器人的重复定位精度。然而动态性能较差,比如指令位置曲线与实际位置曲线间的时间延迟较大。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 451
451











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









