







英威腾伺服基本操作
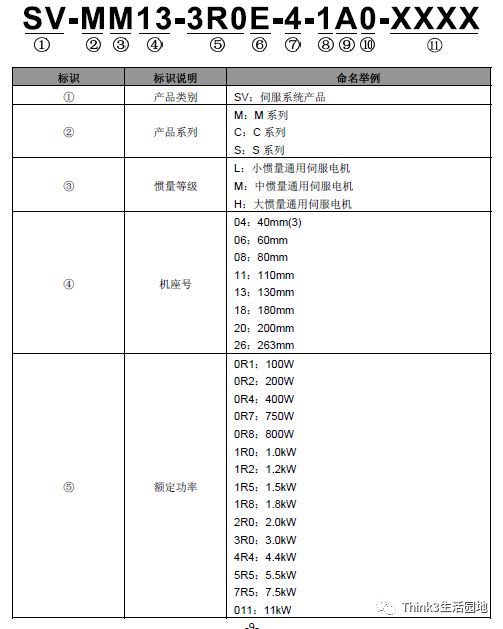
英威腾伺服命名规则

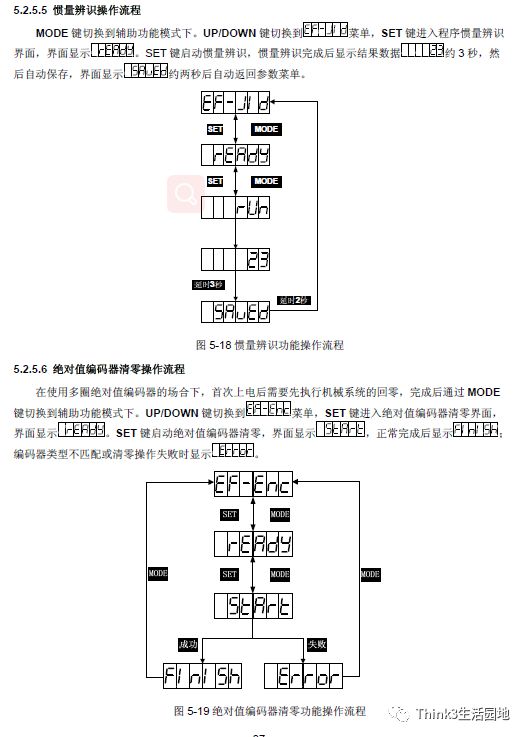
伺服点动等辅助功能的使用
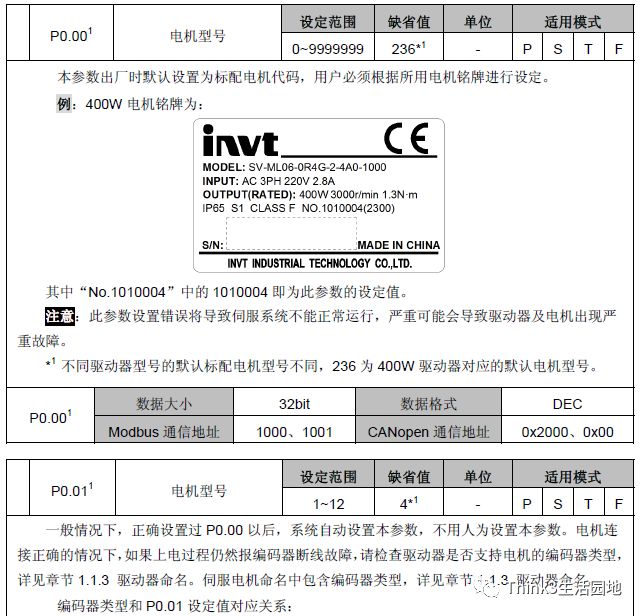
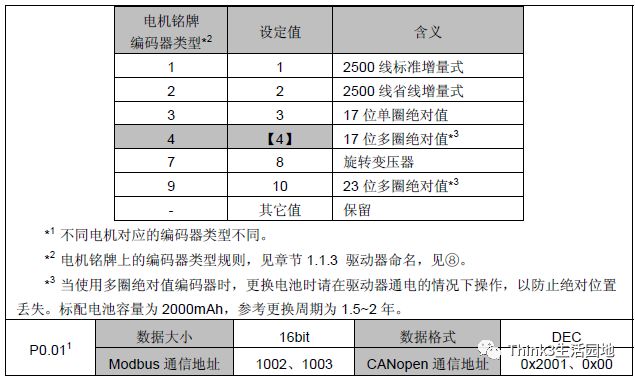
注:英威腾的伺服开机需设电机码,否则出现各种问题,使电机与驱动配对
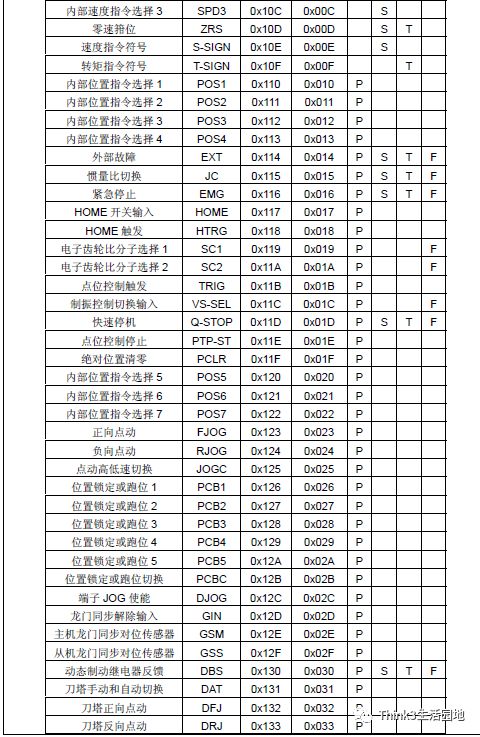
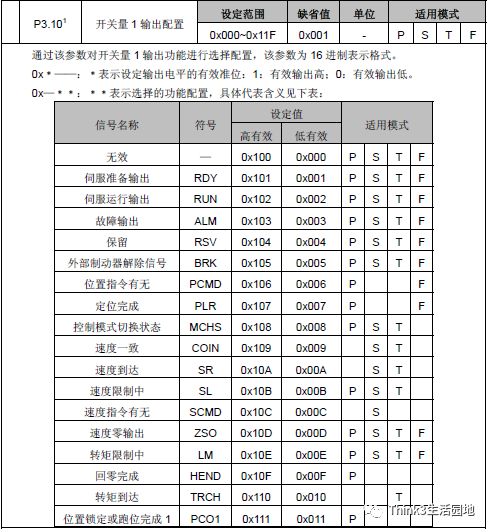
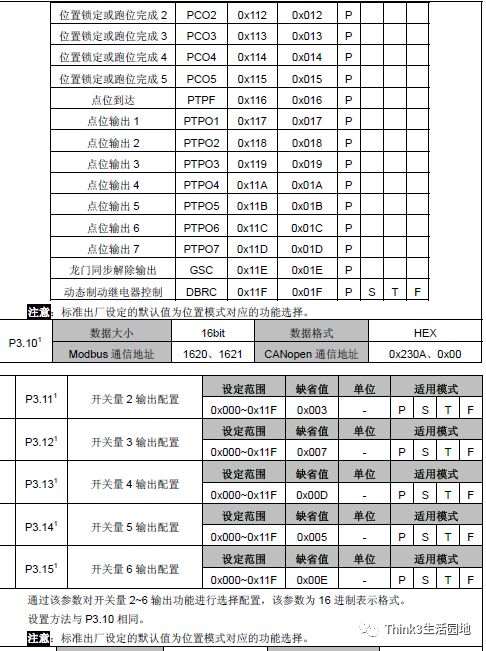
伺服开关量配置
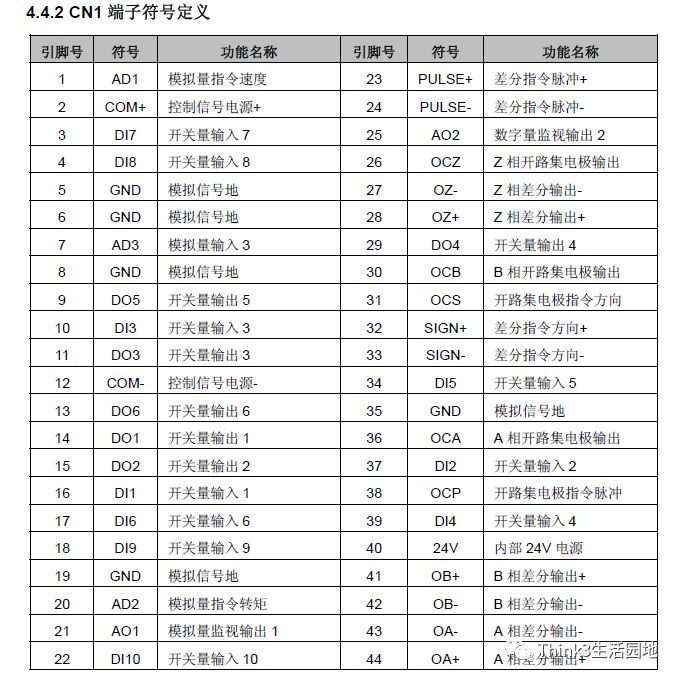
引脚定义
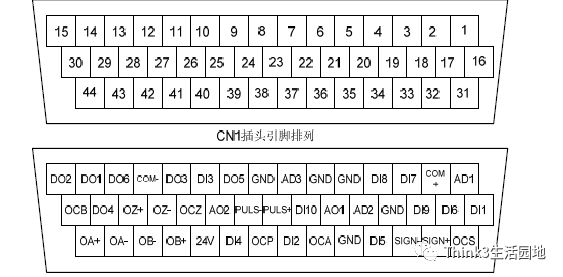
DA200 EtherCAT 机型的IO 和标准版的有略微区别,CN1 端子(DB44)的定义如下, 小功率为5.5kw 及以下,
中功率7.5kw 到22kw。

具体参数表
输入信号


输出信号
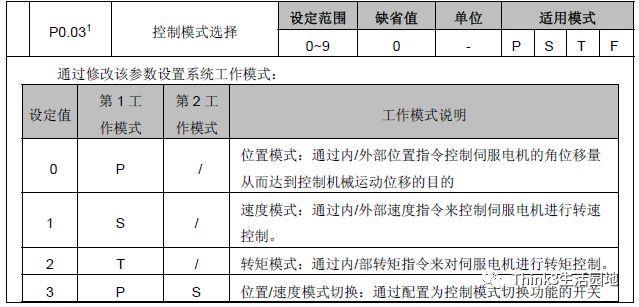
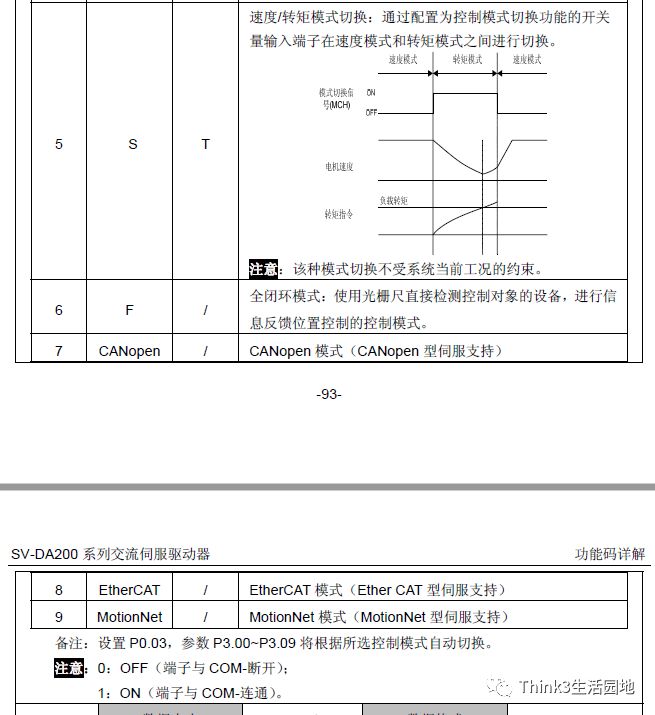
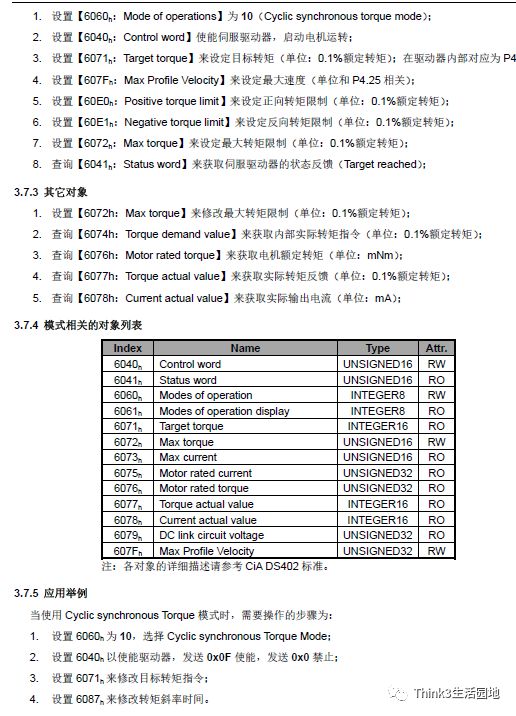
控制模式类型及开机操作
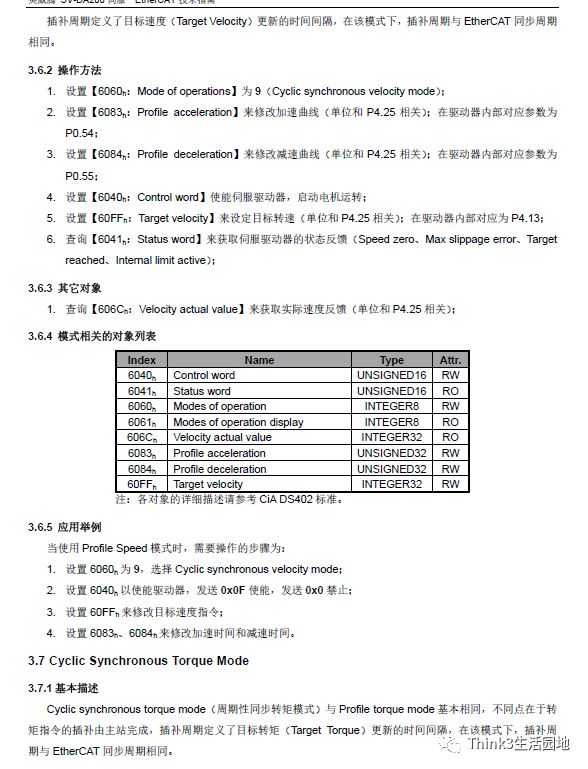
EtherCAT伺服的使用

默认参数需要修改为控制模式,同步类型,同步周期
P0.03 8 ethercat
P4.08 ethercat同步类型 0 free run模式
P4.07同步时间周期位1毫秒

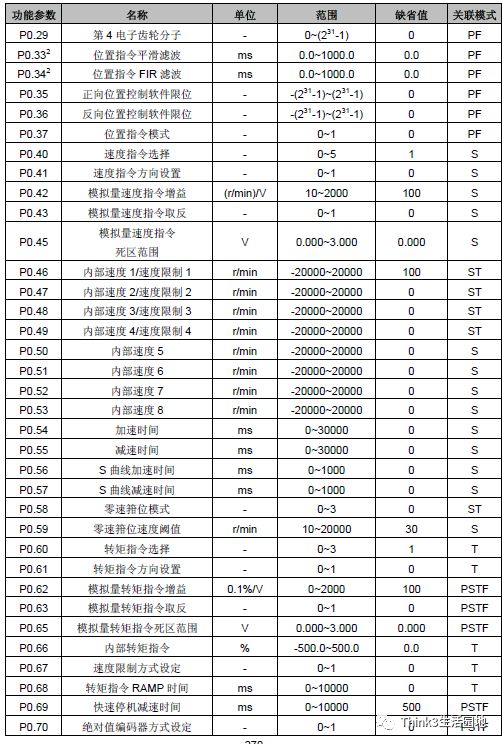
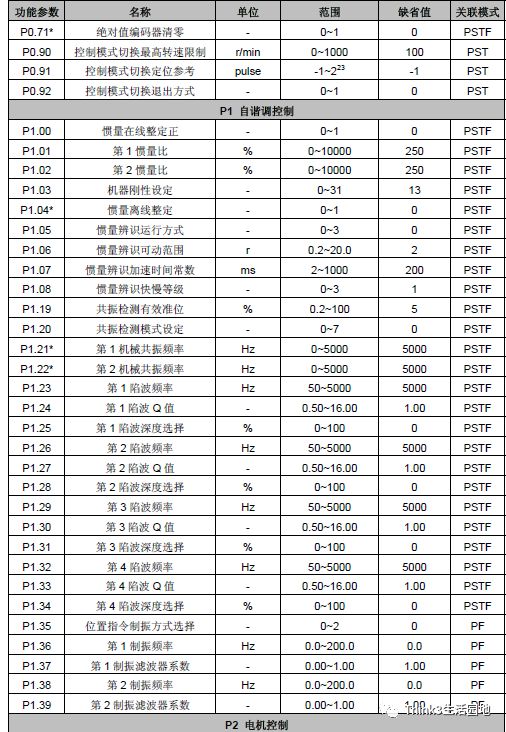
参数列表
参数需反复锤炼而成

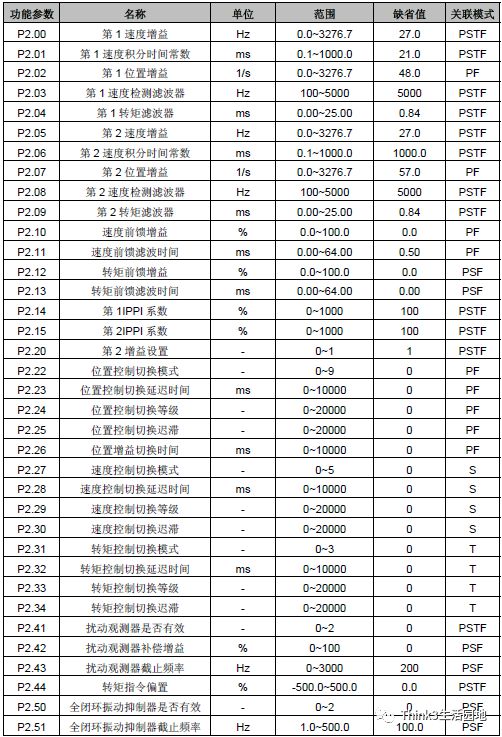
增益刚性调整
1、 刚性选择自动设定调整。手动进行负载惯量比自动估算,然后进行伺服系统刚性设置。
刚性设定分为(0~31)共32 段刚性,分别对应各环路增益进行自动设定。
使用这种方式能快速的进行伺服系统的响应性调整。
伺服系统刚性调整请根据实际情况进行由小到大的刚性设定,以下建议设定:
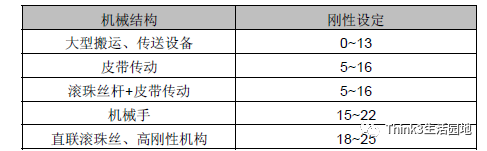
伺服系统刚性设定越大将提高系统的响应性,但同时可能会容易出现噪声、振动等现象,请在设
定时确认机械设备的动作情况进行相应设定。
2、 手动进行调节,当伺服系统出现振荡或者控制性能不够理想时,可通过调整速度环路和位置环路参数来提高系统性能或者消除振荡。
手动调节的一般原则和方法:
速度回路增益:主要用以决定速度回路的反应速度。在机械系统不振动的前提下,参数设定的值愈大,反应速度就会增加。
速度回路积分时间常数:速度回路具有积分元件,可以反应细微的输入。此积分元件会延迟伺服系统的作业,因此,时间常数增加时,反应时间愈慢,所需的定位设定时间就愈长。负载惯性很大,或者机械系统很可能出现振动时,回路积分时间参数必须足够大;否则机械系统将会振动。
转矩指令滤波:机械系统在某些情况下可能会出现共振现象,产生尖锐声调的振动噪音。此时必须进行陷波滤波以消除共振。
位置回路增益:伺服系统的反应由位置回路增益决定。位置回路增益设定为较高的值时,反应速度会增加,缩短定位所需时间。若是要将位置回路增益设定为高值,机械系统的刚性与自然频率也必须很高。一般情况下尽量保证速度环增益大于位置环增益。在位置增益较速度环增益大很多时,系统在阶跃信号作用下有可能超调,将严重破坏系统性能。系统各参数之间总是相互制约的,如果只有位置回路增益增加,位置回路输出的指令可能会变得不稳定,以致整个伺服系统的反应可能会变得不稳定。通常可参照下列步骤对系统进行调整:
1)将位置环增益即先设在较低值,然后在不产生异常响声和振动的前提下,逐渐增加速度环的增益至最大值。
2)逐渐降低速度环增益值,同时加大位置环增益。在整个响应无超调、无振动的前提下,将位置环增益设至最大。
3)速度环积分时间常数取决于定位时间的长短,在机械系统不振动的前提下,尽量减小此值。
4)随后对位置环增益、速度环增益及积分时间常数进行微调,找到最佳值。
下面对以下几种典型情况加以说明(每种情况相对参数合适情况都只改变一个参数):
? 参数合适
此种情况下参数设置较为合适,电机速度可以紧跟位置指令,速度基本无超调,且定位时间较短。
? 速度环积分时间常数较小
伺服驱动器的速度回路必须具有快速的反应性。速度出现了波动,表明由于速度回路积分时间太短,
破坏了速度回路的稳定性,造成伺服电机速度的波动,运行极不平稳。
SV-DA200 系列交流伺服驱动器 调试-231-
? 速度环积分时间常数较大
此时与参数合适情况的情形相比差异不会太明显。速度环积分对速度跟踪位置指令的影响不是很
大,但过大的速度环积分时间会延迟速度回路的反应时间。
? 速度环增益较高
此时电机速度出现波动,与速度环积分时间太小的影响一样,两者必须保持协调。增大速度环增益
的同时应该增加速度环积分时间,否则伺服系统会振荡。
? 速度环增益太低
速度环增益的降低会导致电机速度出现波动。比较速度增益过高的情形可知,此时电机速度的波动
频率更低,这充分表明了速度环增益的提高使系统的工作频率得到了提高,控制系统的快速响应性能好,
能更有效地克服干扰作用的影响。
? 位置环增益过低
在伺服系统中,位置回路的工作频率远比速度回路要低。位置环增益过低时系统难以抵消在速度响
应过程中造成的位置偏差,故导致电机速度跟随位置指令时间间隔的延长。
? 位置环增益过高
在位置伺服系统中,位置环增益还影响稳定性。此时由于位置环增益过高,使电机速度产生了波动。
另外,对比位置环增益过低的情形可知,此时电机速度对于位置指令响应的纯延时减少了。
? 位置环增益太低
当我们把位置环增益调得很低,这时电机速度跟随位置指令表现出了明显的滞后,而且位置定位时
间大大延长了。位置定位系统的高精度和高响应性能大受影响。


















 6425
6425











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









