






 本文详细介绍了伺服驱动器J4-40A在位置控制模式下的接线、参数设置步骤,包括PNP接法、伺服参数配置、IO映射、回原点参数、存储器参数分配和PLC程序编写。通过实例展示了如何进行初始化、原点回归和定位控制子程序的编写,以确保伺服驱动器准确运行。
本文详细介绍了伺服驱动器J4-40A在位置控制模式下的接线、参数设置步骤,包括PNP接法、伺服参数配置、IO映射、回原点参数、存储器参数分配和PLC程序编写。通过实例展示了如何进行初始化、原点回归和定位控制子程序的编写,以确保伺服驱动器准确运行。
上一篇谈了一下速度控制模式的接线及参数设置;这一次在来谈谈位置控制模式
还是以J4-A为例进行说明 下图:
第一步:J4-40A 源型 位置控制模式下CN1主要接线如下图:
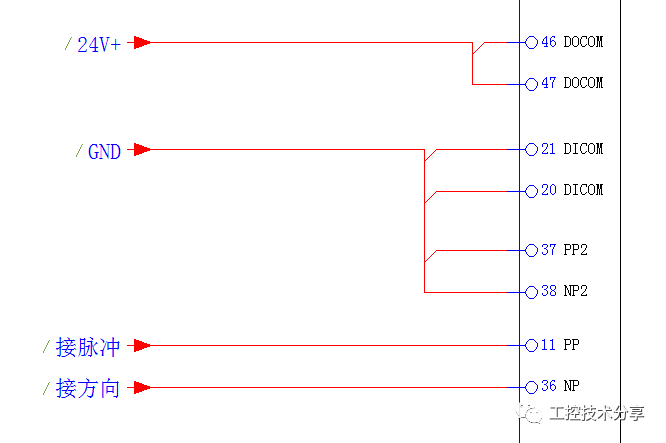
PNP接法
第二步:设置伺服参数

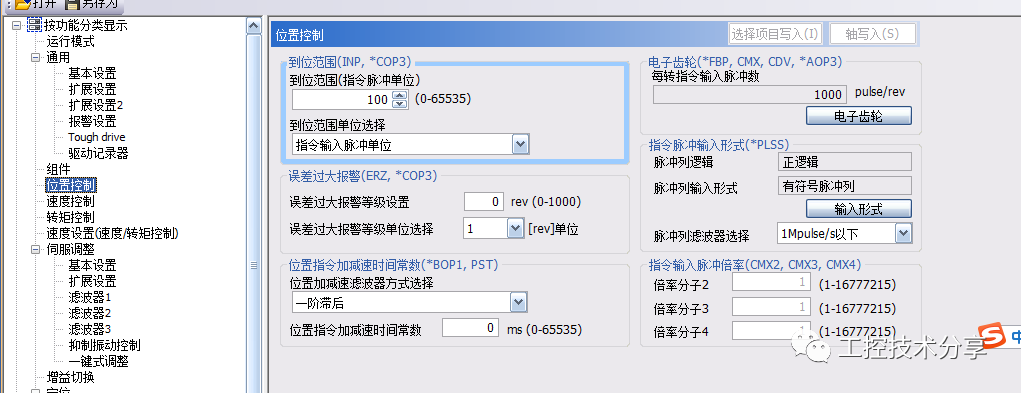
第三步:下载参数到伺服驱动器中;完成设置
200smar

上一篇谈了一下速度控制模式的接线及参数设置;这一次在来谈谈位置控制模式
还是以J4-A为例进行说明 下图:
第一步:J4-40A 源型 位置控制模式下CN1主要接线如下图:
PNP接法
第二步:设置伺服参数
第三步:下载参数到伺服驱动器中;完成设置
200smar

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2296
2296





