






每日一省:你觉得工作上还有哪些需要改进的地方?
在方案说明书中常用C/T来作为设备性能参数,说明设备的生产能力。C/T是指设备完成一个完整动作周期所需要的时间。设备的理论C/T是通过时序图的分析得到的。(注意:不是简单的把机构各个动作完成的时间简单相加。)
基本概念
(1)时序:时序包含设备各机构动作名称及动作顺序、起止时间。
(2)时序图:用来描述设备的动作过程包括动作顺序和动作周期的图表。时序图分析是机械设计非常重要且常用基本技术,既是分析设备C/T的重要方法也是程序控制软件编写的主要依据。客户关注设备产能时,一般会问到依据是什么,时序图就是设备理论产能的依据,所以在方案说明书中一般都要有时序图分析这一项。
时序图的画法并没有统一的标准,有多种画法,常用的有坐标法和表格法。
时序图的画法 - 坐标法:
图形由横轴和纵轴组成。
横轴为时间,单位是秒。一般按最短的动作时间周期进行分格,假设最短动作时间周期在0.2秒左右,将横轴划分为0.2秒/格。
纵轴一般为动作名称。要求动作分解细化且完整,同一动作只出现一次;动作名称的排序,以机构实际动作的先后自下往上排列,紧密关联的动作名称连续排列。
时序图区采用类似高低电平的表示方式,下横线表示不动作,上横线表示动作,长短表示间隔时间。
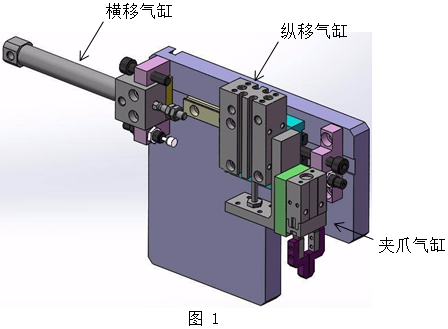
举例:利用气缸做一个简易的机械手,将物体从A点夹持搬运到B点,A、B两点间的距离为300毫米,Z向行程是30毫米。
时序图绘制步骤
(1)结构示意图
在结构示意图中标注每个运动机构的名称。
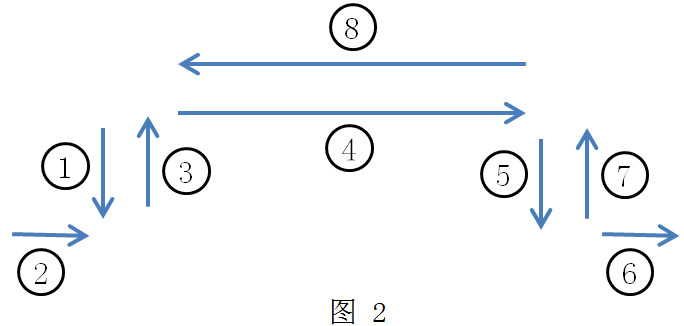
(2)动作分解:
将机构动作进行分解。动作和动作顺序标识出来。便于检查动作有无遗漏、动作顺序是否正确。如图2,此图可在纸上徒手绘制。
(3)时序图绘制:
坐标法一般采用CAD进行绘制比较方便,图纸空间足够大,时间可以分得很细和精准。如图3。图中序号可不标出。
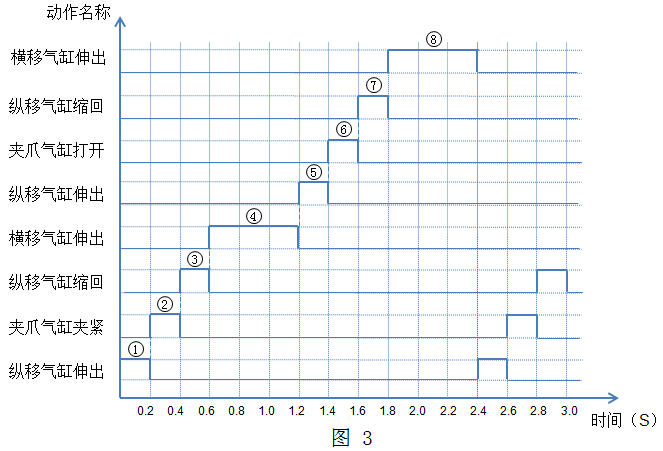
(4)从图中可以看出,机械手的C/T为2.4 秒。
同样采用坐标法,我们将动作名称改为机构名称,下横向表示原始动作状态,上横线表示动作状态改变。如下横线分别表示纵向气缸缩回、夹爪气缸打开、横移气缸缩回,上横线表示气缸伸出、夹爪气缸夹紧、横移气缸伸出。如图4。图中序号可不标出。
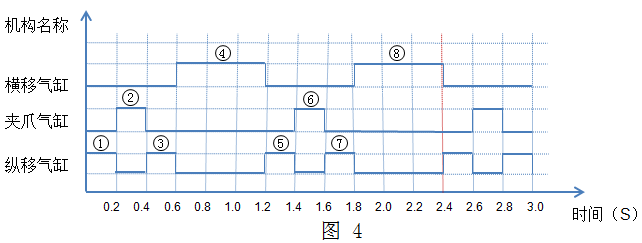
同样从图中可以看出机械手的C/T为2.4 秒。
上述两种方法都为坐标法,不同之处图4将图3中的动作名称改为了机构名称。从单一动作来看,有运动动和静止两种状态;从机构来看有前进、后退、停止三种状态(也可表示为伸出、缩回、停止;上升、下降、停止等)。图3动作比较清晰,有利于写控制程序,每一个动作对应电磁阀的一个线圈的通断。缺点是机构动作较多时绘制起来比较复杂,比较适合简单的机构。图4看起来比图3简洁不少,每一行代表一个机构的完整的动作周期,比较适合机构多、动作较复杂的设备。
坐标法直观方便,可精准绘制,缺点是制作相对比较麻烦,尤其是修改不是很方便,如增减动作或调整时间周期,与之相关连的动作全部要作调整。
时序图的画法 - 表格法:
利用Excel表格来描述设备动作时序的一种方法。列分为动作名称、动作周期、时序图等。与坐标法一样,动作名称需要分解细化完整,同一动作只出现一次。动作名称的排序,以机构实际动作的先后自上往下排列。
动作周期列直接填写完成动作的时间,以秒为单位。时序图部分每列代表最小动作周期,涂色来表示动作及时间长短。
将上例按表格法绘制时序图,如图5。
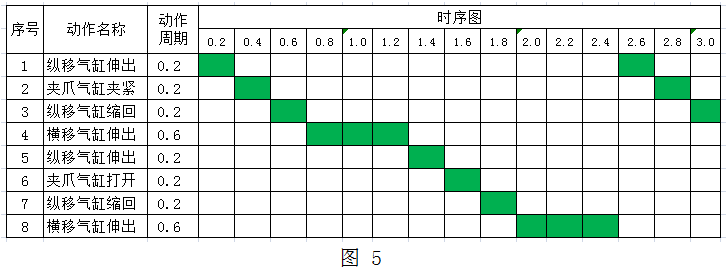
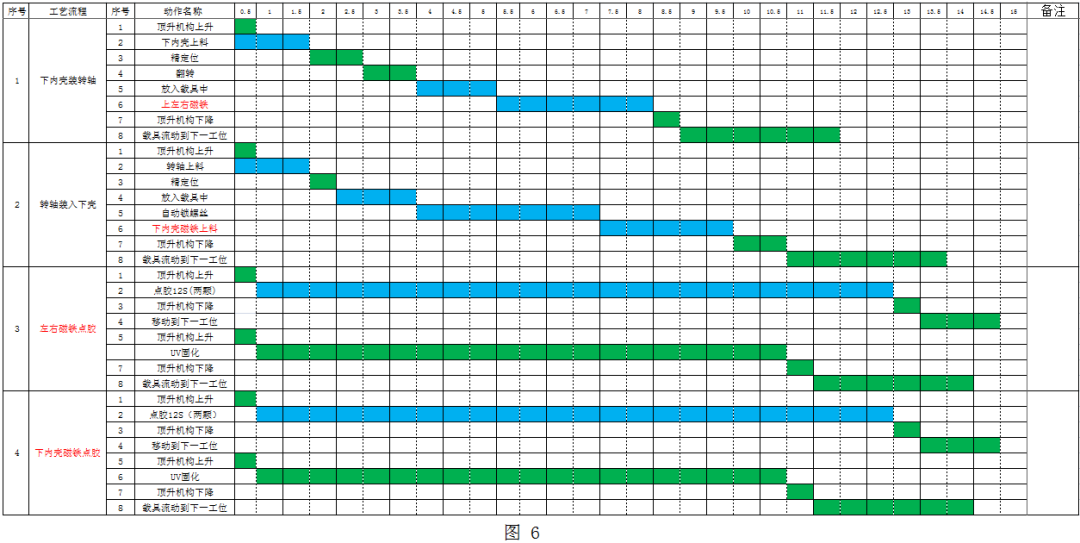
表格法制作起来比较容易,修改起来也比较方便。比较适合在方案阶段快速制作时序图。也比较适合大型项目的实现图绘制,如图6。
通过时序分析可以得到C/T,可以很容易发现动作完成耗时最长的工位,我们称之为瓶颈工位(站)。
要提高设备的产能,重点要缩短瓶颈工位的C/T,可以通过功能分解、组合、增加工位等措施来完成。
功能分解,将在一个工位完成的工序分解到两个或多个工位去完成。
功能组合,调整产品的生产工序,对各工站的时间进行调整排配和时间平衡。
对于没法分解的工序,则只有通过增加并行工位数来保证。
做时序图的重点是将机构动作详细分解,在动作名称编写完成后,先要仔细核对,确保准确完整后在进行下一步。再就是确定每个动作的时间周期。时间周期包含动作时间和停止时间,确定动作时间有些是根据经验值,有些则是需要计算。
动作周期根据不同的传动方式,通过计算来得到每一个动作完成的时间。以下经验值作为方案阶段评估时参考。
气缸:标准速度范围是在50~500米/秒,夹爪按0.2秒计算,行程30mm以下的按0.2秒,行程30~200mm以下按0.5秒计算,大缸径大行程需查表计算。
皮带传输:1.5~6米/分;
倍速链传输:2~20米/分;
同步带传输:50米/分;
丝杆传输:0.5米/秒;(最大传输速度 = 丝杆导程*伺服电机额定转速。要考虑加减速的时间,一般0.15秒。加速度为3m/s2)
齿轮齿条:2米/2;(承载力大,传动精度较高,可达0.1mm,可无限长度对接延续)
直线马达:5米/秒 (加速度为10G,精度0.004mm)
平面多关节机器人、桌面型四轴机械手:2 秒/循环;
并联机械手:1.5 秒/循环;
六轴机械手:3秒/循环;与具体的动作和距离相关。
人工取放料:3秒。
End
声明:该文为本公众号原创文章,仅供学习参考,版权归作者所有。欢迎分享转发,转载时请注明原作者姓名和及本公众号。不得复制本文内容发表和用作商业用途。
觉得文章不错,就点个在看吧

















 90
90

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









