





自动驾驶系统通过对传感器数据进行分析处理来感知周围环境,并以此为依据进行决策,因此传感器对自动驾驶系统尤为重要。而自动驾驶系统在开发过程中,传统的测试方法无法达到高效的验证,如果使用仿真测试,并搭建真实场景以及生成高保真的虚拟传感器模型,既可以短时间内实现现实中难以达到的测试里程,又可以保障测试验证的安全性。
虚拟测试-VTD
对于场景仿真软件-VTD,相信大家并不陌生。VTD可以实现复杂交通环境下的视景建模以及仿真,如下图,是VTD对交通场景以及天气的仿真图例。

图一:VTD交通场景仿真(图片来自网络)

图二:VTD天气仿真(图片来自网络)
我们知道,自动驾驶需要靠传感器去感知外界环境,所以在验证自动驾驶系统时,仿真传感器是构建虚拟测试环境的核心之一。VTD不仅支持传感器的仿真和开发,而且可以复现在实际道路上进行测量和感知时所产生的偏差值,如噪点等,从而实现对真实传感器的高保真仿真。下面,我们就来为大家介绍一下在VTD中传感器的仿真和开发。
VTD传感器模型仿真的分类
由上述可知,自动驾驶系统主要是对传感器输出的数据进行处理分析,因此,在VTD测试仿真环境下,传感器模型主要是对实际传感器输出数据进行仿真。根据传感器输出数据的不同,通常将传感器模型分为两类。
第一类是基于VTD的理想传感器对场景中直接生成目标信息列表数据作为传感器模型的输出,如Camera,毫米波雷达等。如下图中,是对理想传感器识别到的信息列表的显示。

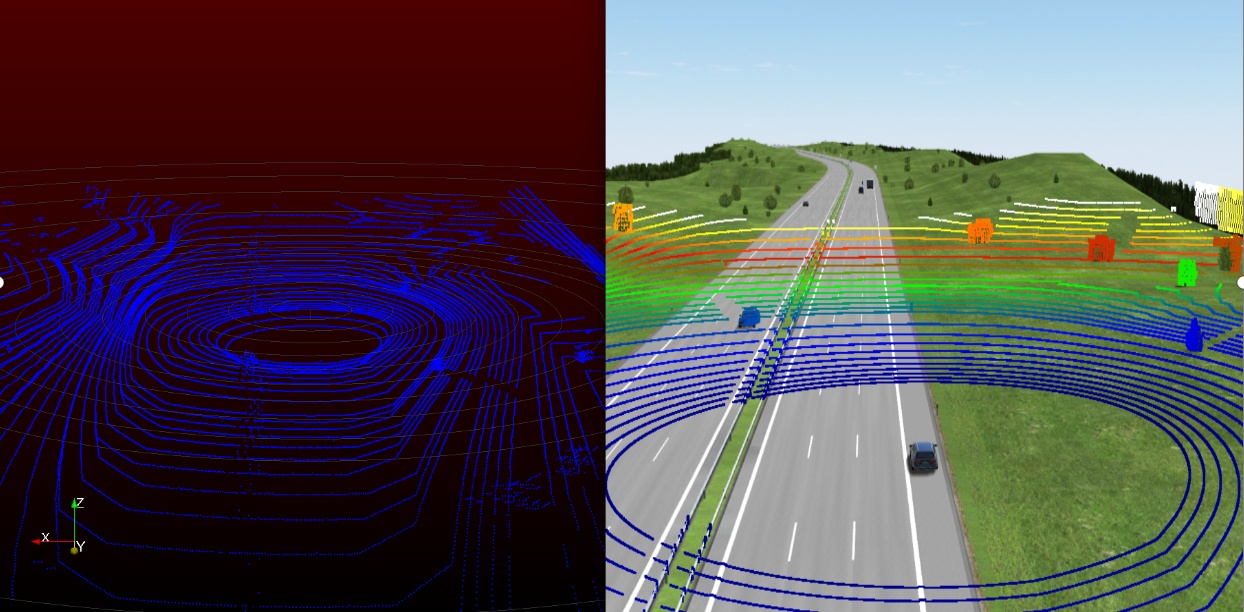
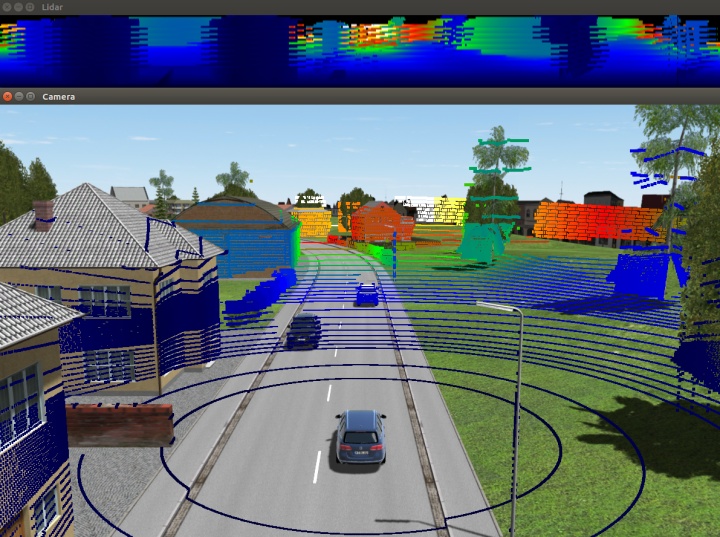
第二类是基于对测量过程的物理描述,如距离,反射率等,并且会以虚拟场景为基础生成低级测量数据。如下图,是对某40线激光雷达的仿真点云以及光线的显示。
在自动驾驶技术中涉及的环境感知传感器主要包括视觉类摄像机和雷达类测距传感器,VTD完全具备对这些传感器的仿真,并且可以复现在实际道路中进行测试和感知时的误差,还保证了数据输出的实时性。
下面针对以上两种类型的传感器进行介绍。
1、目标信息列表式数据传感器
在VTD中集成了构建视觉感知设备模型,实现对目标的捕获、编号、分类、距离、角度等必要信息的识别,可以充分提供给我们当前所需仿真的虚拟传感器输出数据。在VTD的GUI中可以对传感器参数进行配置,如下图所示。
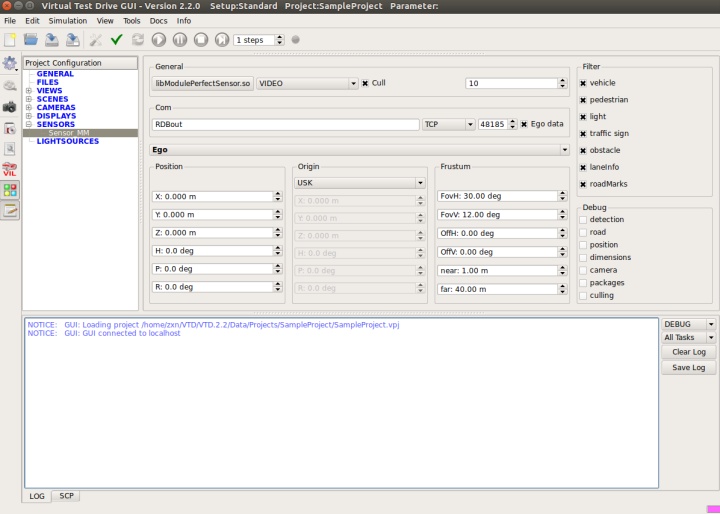
在该界面中,提供以下控制:
-General:对传感器插件,类型(Video/Radar)的选择以及探测目标数量的限制
-Filter:对检测对象的筛选
-Com:传感器模型的通讯方式以及端口的配置
-Sensor owner:携带传感器对象选择
-Position:传感器相对于车身的位置与姿态
-Origin:坐标系,默认为USK
-Frustum:传感器的参数配置,如横纵向检测角度的范围,检测距离等
-Debug:用于调试,sensor/module manager输出信息的选择
我们可以在RDBSniffer工具中对配置后输出信息进行显示,如下:
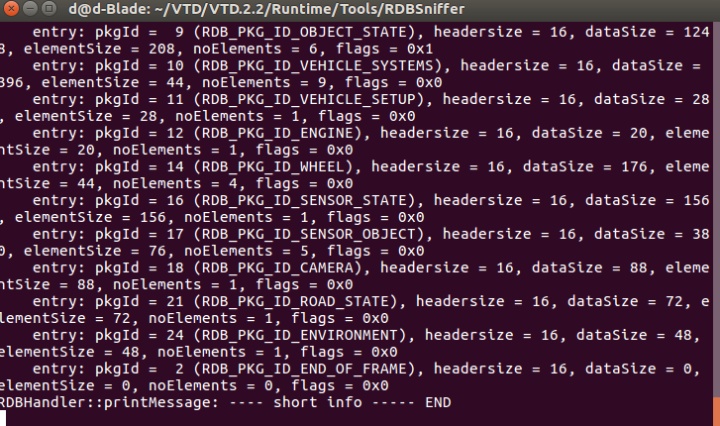
根据对信息列表的提取与转发实现我们所仿真的虚拟传感器。在自动驾驶中所使用的Camera,GPS,毫米波雷达,超声波雷达等,都可以基于此类传感器进行仿真开发。
2、测量式数据传感器
测量式数据传感器用于仿真自动驾驶系统中最关键的激光雷达传感器。该激光雷达模型是基于光线跟踪法对测量过程中生成的数据进行仿真,这样就可以在仿真环境内实时生成仿真的激光雷达点云。并且可以通过与实际传感器在检测过程中生成的数据进行对比,适当的对传感器模型的准确性和有效性进行判断。
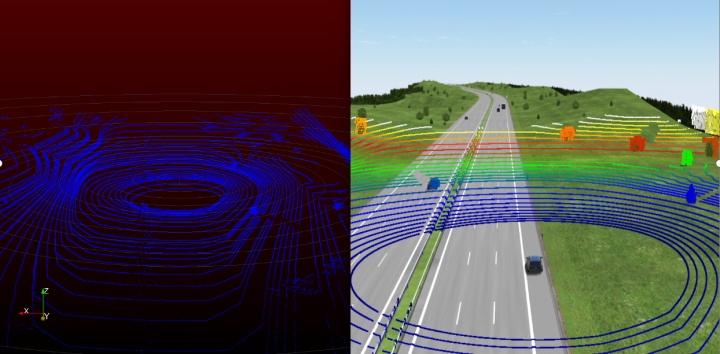
在VTD中的虚拟环境中,可以基于Nvidia OptiX光线跟踪引擎来提供光线跟踪框架。在对激光雷达传感器的光束发射、反射和检测进行建模时,传感器测量模型的相机程序会为每一通道方位角和仰角生成一条光线。如果得到有效的测距,就会产生点云。如下图是对仿真某40线激光雷达的点云显示。

我们知道激光雷达分为均匀与非均匀分布两种,这取决于真实传感器在检测时每一根光线在扫描的横向偏差与纵向偏差,VTD支持对这两种类型仿真。上述的某40线雷达。
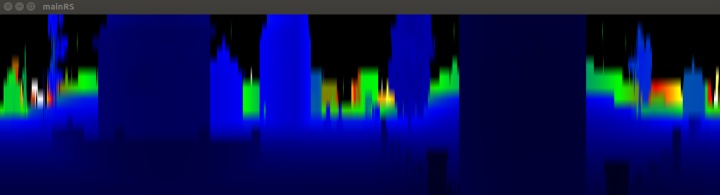
下图是仿真的雷达模型与上位机进行验证时的显示。
VTD可以对国内外各个品牌的激光雷达,摄像头,以及毫米波雷达等传感器进行仿真,并且可以针对在真实环境下的影响、产生的误差进行仿真,使自动驾驶得到更有效的验证,为自动驾驶提供一个很好的测试平台。















 4852
4852











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









