






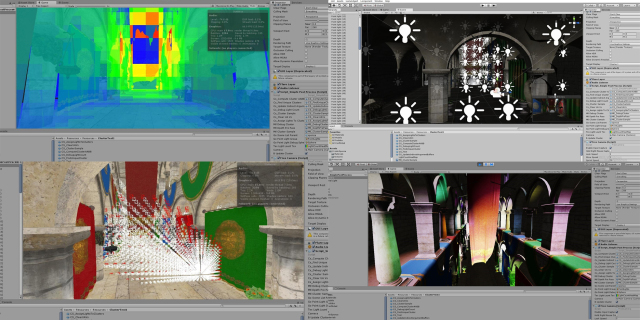
再说明一下,第一篇文章,是对Unity 实现Cluster 灯光裁剪的一个概述,从第二篇开始,我们开始结合代码详细展开,实现每一个流程。强烈建议大家先看概述那篇文章,很多推导,总结都在那里,这里及以后的文章不重复相关内容。
这篇文章,我将介绍如何实现cluster 与光源的求交,这一步骤,是整套流程最为核心的地方,如果这一步计算错误,那么后面的结果都没法继续。为了方便预览,我们先考虑在scene 视图下做求交并显示,实际在game 视图中,只需要稍微修改一下即可,这个会在下篇文章,也就是Unity 实现的最后一片文章里面做介绍。
1. Cluster Cube 跟随camera
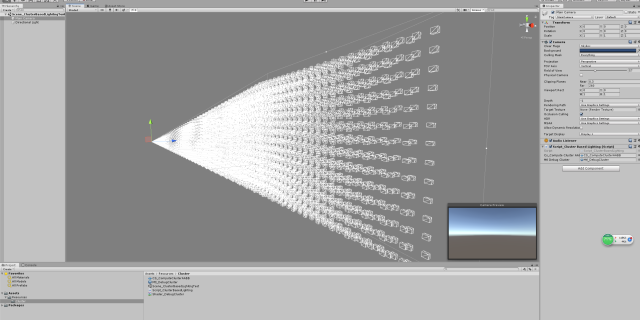
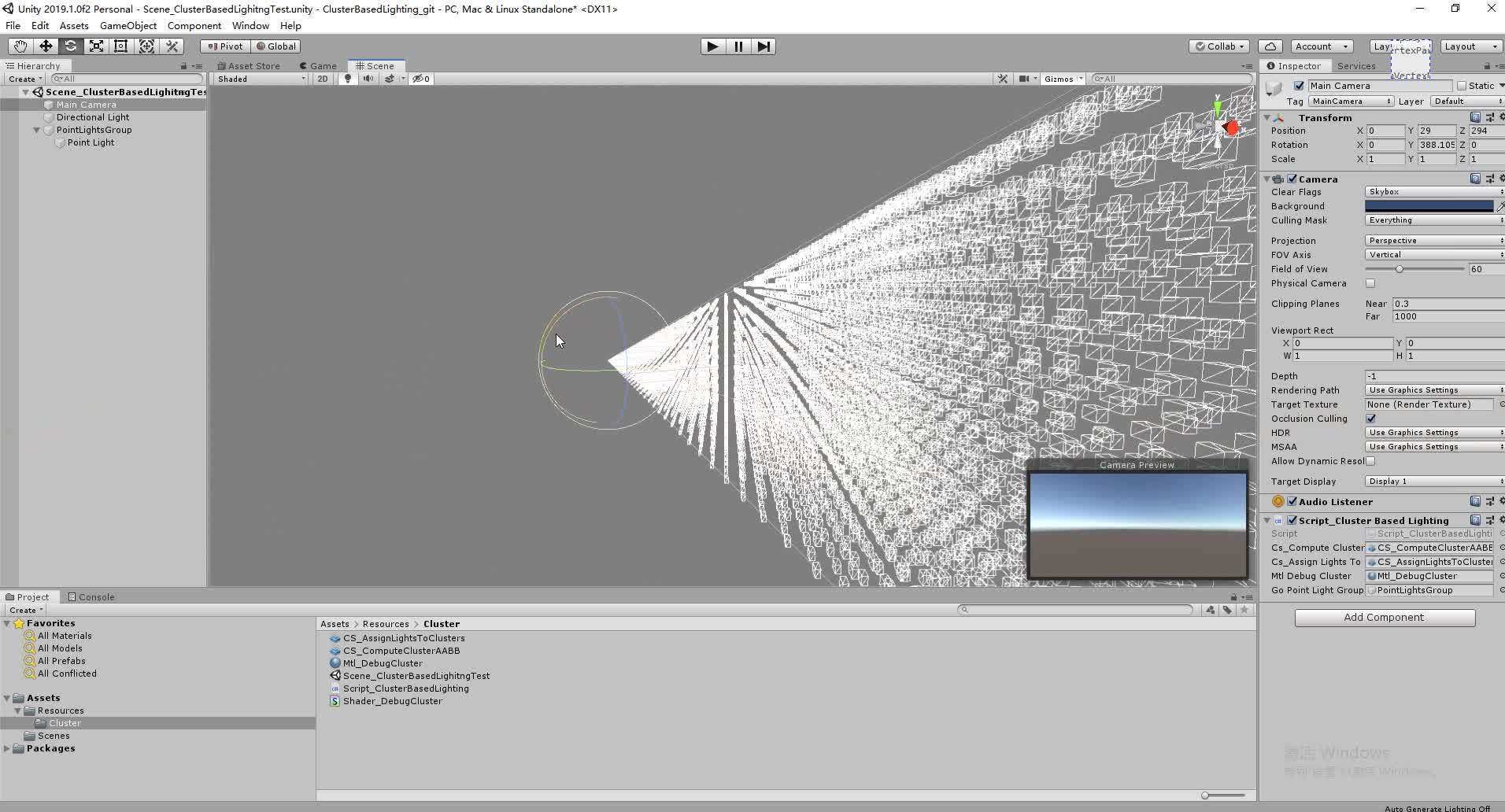
上回我们算出了View 空间下 Cluster aabb 的列表,并把它存到了cb_ClusterAABBs 这个buffer中,并且在scene 视图中画出了debug 的cube。但是当我们移动相机是发现,debug cube 并没有跟着动,是因为,上篇文章里面,我们直接把View 空间下的坐标 当成世界坐标,去做MVP,为了能让scene 视图下的debug cube 跟着相机动,我们需要把相机的world 矩阵传给shader:
float4x4 _CameraWorldMatrix;
float4 WorldToProject(float4 posWorld)
{
float4 l_posWorld = mul(_CameraWorldMatrix, posWorld);
float4 posVP0 = UnityObjectToClipPos(l_posWorld);
return posVP0;
}
[maxvertexcount(16)]
void main_GS(point VertexShaderOutput IN[1], inout TriangleStream<GeometryShaderOutput> OutputStream)
{
...
[unroll]
for (uint i = 0; i < 18; ++i)
{
...
OUT.Position = WorldToProject(Pos[Index[i]]);
...
}
}
c# 脚步传参数到shader
mtlDebugCluster.SetMatrix("_CameraWorldMatrix", _camera.transform.localToWorldMatrix);
搞定~
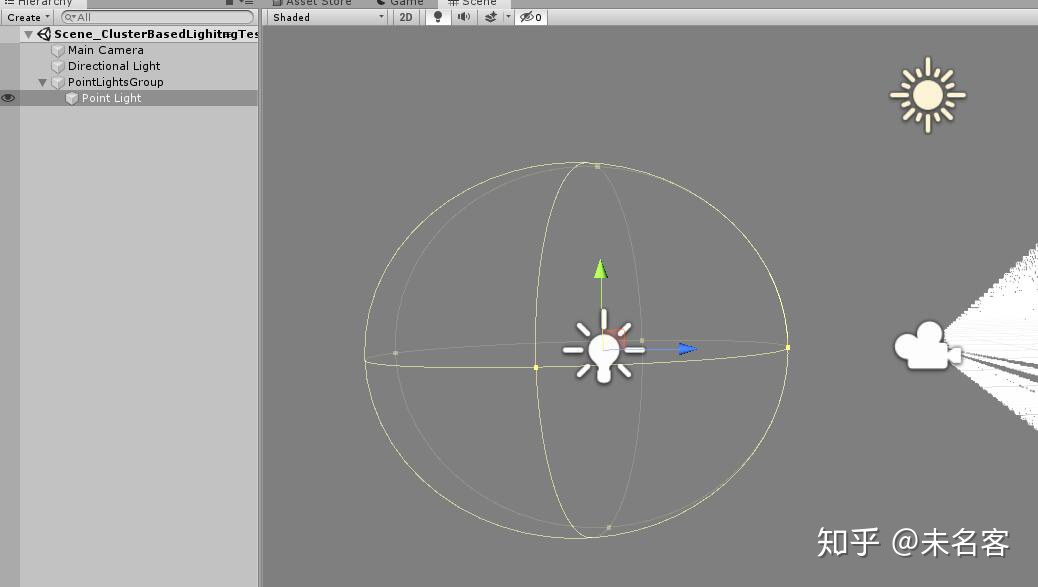
2. 光源准备
接下来,我们开始准备光源的数据。我创建了一个空物体,表示pointlight 组,子物体都是场景中的点光源。
在光源求交这一步,我们只需要关心,点光源的世界坐标和range 属性。将设我们最多支持2048个点光源,构建如下buffer,存放点光源pos range 列表,并传递给shader:
private ComputeBuffer cb_PointLightPosRadius;
cb_PointLightPosRadius = new ComputeBuffer(MAX_NUM_LIGHTS, sizeof(float) * 4);在每帧开始的时候,更新这个buffer
void UpdateLightBuffer()
{
List<Vector4> lightPosRatioList = new List<Vector4>();
foreach (var lit in lightList)
{
lightPosRatioList.Add(new Vector4(lit.transform.position.x, lit.transform.position.y, lit.transform.position.z, lit.range));
}
cb_PointLightPosRadius.SetData(lightPosRatioList);
}ok,光源准备完毕,接下来开始求交。
3. 数据结构
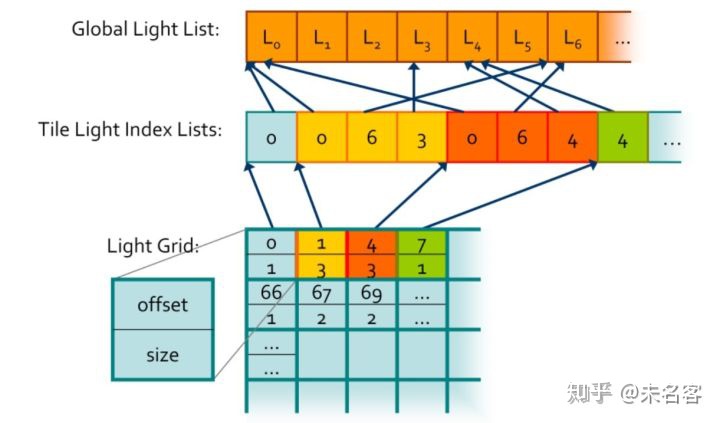
- GlobalLightList: 全局灯光列表,包含了灯光的所有信息
- LightIndexList: 灯光索引列表
- LightGrid: Cluster 灯光列表对应起始位置,个数
我们只需要在这一步骤里面,LightIndexList, 和 LightGrid 计算出来即可。
4. 光源 与 Cluster 求交
需要注意的是:
1、我们为每一个Cluster 分配一个线程组,所以需要dispatch clusterDimXYZ 个线程组。
2、需要定义几个groupshared临时变量方便处理数据
3、因为是多线程处理,所以线程同步非常重要
4、最终目的,求解LightIndexList 和 LightGrid
首先先把完整的cs 代码贴出来,我们一点一点分析:
// Each #kernel tells which function to compile; you can have many kernels
#pragma kernel CSMain
// Axis-Aligned bounding box
struct AABB
{
float4 Min;
float4 Max;
};
struct Sphere
{
float3 c; // Center point.
float r; // Radius.
};
RWStructuredBuffer<uint> RWPointLightIndexCounter_Cluster;// : register(u2);
RWStructuredBuffer<uint2> RWPointLightGrid_Cluster;// : register(u4);
RWStructuredBuffer<uint> RWPointLightIndexList_Cluster;// : register(u6);
StructuredBuffer<AABB> ClusterAABBs;// : register(t1);
StructuredBuffer<float4> PointLights;// : register(t8);
uint PointLightCount;
// Compute the square distance between a point p and an AABB b.
// Source: Real-time collision detection, Christer Ericson (2005)
float SqDistancePointAABB(float3 p, AABB b)
{
float sqDistance = 0.0f;
for (int i = 0; i < 3; ++i)
{
float v = p[i];
if (v < b.Min[i]) sqDistance += pow(b.Min[i] - v, 2);
if (v > b.Max[i]) sqDistance += pow(v - b.Max[i], 2);
}
return sqDistance;
}
// Check to see if a sphere is interesecting an AABB
// Source: Real-time collision detection, Christer Ericson (2005)
bool SphereInsideAABB(Sphere sphere, AABB aabb)
{
float sqDistance = SqDistancePointAABB(sphere.c, aabb);
return sqDistance <= sphere.r * sphere.r;
}
#define NUM_THREADS 1024
groupshared uint gs_ClusterIndex1D;
groupshared AABB gs_ClusterAABB;
groupshared uint gs_PointLightCount;
groupshared uint gs_PointLightStartOffset;
groupshared uint gs_PointLightList[1024];
struct ComputeShaderInput
{
uint3 GroupID : SV_GroupID; // 3D index of the thread group in the dispatch.
uint3 GroupThreadID : SV_GroupThreadID; // 3D index of local thread ID in a thread group.
uint3 DispatchThreadID : SV_DispatchThreadID; // 3D index of global thread ID in the dispatch.
uint GroupIndex : SV_GroupIndex; // Flattened local index of the thread within a thread group.
};
#define AppendLight( lightIndex, counter, lightList )
InterlockedAdd( counter, 1, index );
if ( index < 1024 )
{
lightList[index] = lightIndex;
}
[numthreads(NUM_THREADS, 1, 1)]
void CSMain (ComputeShaderInput IN)
{
uint i, index;
if (IN.GroupIndex == 0)
{
gs_PointLightCount = 0;
gs_SpotLightCount = 0;
gs_ClusterIndex1D = IN.GroupID.x;
gs_ClusterAABB = ClusterAABBs[gs_ClusterIndex1D];
}
GroupMemoryBarrierWithGroupSync();
// Intersect point lights against AABB.
for (i = IN.GroupIndex; i < PointLightCount; i += NUM_THREADS)
{
//if ( PointLights[i].Enabled )
{
float4 pointLight = PointLights[i];
float3 pointLightPosView = pointLight.xyz;
Sphere sphere = { pointLightPosView, pointLight.w };
if (SphereInsideAABB(sphere, gs_ClusterAABB))
{
AppendLight(i, gs_PointLightCount, gs_PointLightList);
}
}
}
GroupMemoryBarrierWithGroupSync();
// Now update the global light grids with the light lists and light counts.
if (IN.GroupIndex == 0)
{
// Update light grid for point lights.
InterlockedAdd(RWPointLightIndexCounter_Cluster[0], gs_PointLightCount, gs_PointLightStartOffset);
RWPointLightGrid_Cluster[gs_ClusterIndex1D] = uint2(gs_PointLightStartOffset, gs_PointLightCount);
}
GroupMemoryBarrierWithGroupSync();
// Now update the global light index lists with the group shared light lists.
for (i = IN.GroupIndex; i < gs_PointLightCount; i += NUM_THREADS)
{
RWPointLightIndexList_Cluster[gs_PointLightStartOffset + i] = gs_PointLightList[i];
}
}
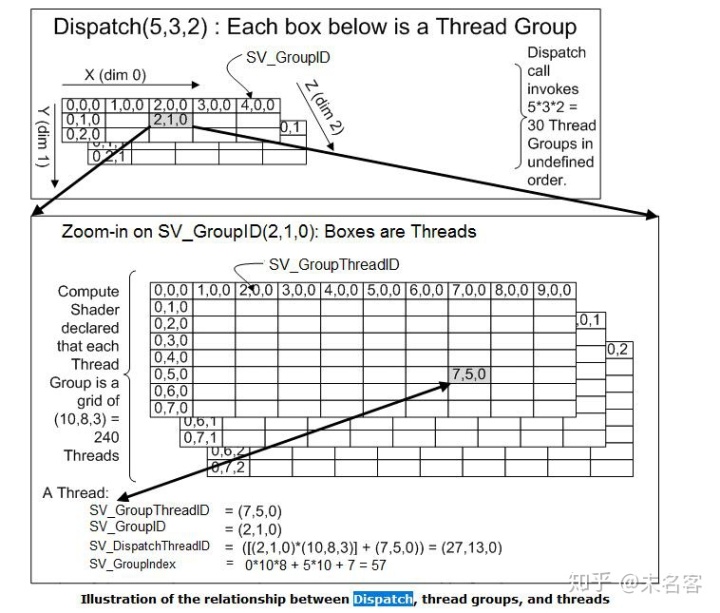
4.1 CS 知识复习
使用cs 做这种求交,其实很有意思,也稍微有点绕。为了方便大家理解,我先解释一下这里要用到的一些CS 知识:
1)ID相关:
2)Barrier 相关
当我们在不同线程访问同一个资源的时候,我们需要使用Barrier来进行阻塞和同步。
分为以下两种:
GroupMemoryBarrier
DeviceMemoryBarrier
AllMemoryBarrier DeviceMemoryBarrierWithGroupSync
GroupMemoryBarrierWithGroupSync
AllMemoryBarrierWithGroupSyncGroupMemoryBarrier是等待对GroupShared变量的访问。
DeviceMemoryBarrier是等待对Texture或Buffer的访问。
AllMemoryBarrier是以上两者的和。
*WithGroupSync版本是需要同步到当前指令
3) Interlocked 操作
原子操作,不会被线程调度机制打断。
InterlockedAdd
InterlockedAnd
InterlockedCompareExchange
InterlockedCompareStore
InterlockedExchange
InterlockedMax
InterlockedMin
InterlockedOr
InterlockedXor4.2 求交函数
求交函数很好理解,我们已经有了了cluster 的aabb,根据光源xyz,range 创建一个球体,就可以执行常规 球体与aabb的求交运算。
float SqDistancePointAABB(float3 p, AABB b)
bool SphereInsideAABB(Sphere sphere, AABB aabb)4.3 group shared 变量
groupshared uint gs_ClusterIndex1D;
groupshared AABB gs_ClusterAABB;
groupshared uint gs_PointLightCount;
groupshared uint gs_PointLightStartOffset;
groupshared uint gs_PointLightList[1024];因为一个线程组,处理一个cluster 的数据,所以 这些个 groupshared 变量,是每一个cluster 的1024个线程共有的,内容很好理解,就是他们各自的名字。我们在这里创建这些临时的变量,主要的目的,是能求出一个cluster 的gs_PointLightList,即点光源列表,点光源总个数,gs_PointLightCount, 以及它在总点光源 list 中的位置 gs_PointLightStartOffset。
4.4 4个阶段
整个计算过程,分四个阶段,一个步骤必须等带全部线程执行完,才能执行下一个阶段,针对当前cluster
第一阶段: 初始化groupshared 变量值
第二阶段:计算当前 cluster, 所受点光源影响的总个数,并填充光源index 列表
第三阶段:使用gs_PointLightStartOffset,gs_PointLightCount,填充light grid
第四阶段:填充light 列表
4.5 第二阶段
对第二阶段简单介绍一下:
// Intersect point lights against AABB.
for (i = IN.GroupIndex; i < PointLightCount; i += NUM_THREADS)
{
//if ( PointLights[i].Enabled )
{
float4 pointLight = PointLights[i];
float3 pointLightPosView = WorldToView(float4(pointLight.xyz, 1)).xyz;// mul(float4(pointLight.xyz, 1), _CameraLastViewMatrix).xyz;
Sphere sphere = { pointLightPosView, pointLight.w };
if (SphereInsideAABB(sphere, gs_ClusterAABB))
{
AppendLight(i, gs_PointLightCount, gs_PointLightList);
}
}
}1)i += NUM_THREADS
请记住:因为我们为每一个cluster,分配了一个线程组。所以这个组内处理的都是同一个cluster 的数据~~~
所以,我们在这里,是为了对当前cluster 遍历所有的light,整个线程组,总共有NUM_THREADS个线程,一个线程跑一盏灯,一个来回,就是i += NUM_THREADS啦~
2) Append宏
#define AppendLight( lightIndex, counter, lightList )
InterlockedAdd( counter, 1, index );
if ( index < 1024 )
{
lightList[index] = lightIndex;
}为了方便,我们定义了一个AppendLight 宏,其实可以说的不多,在线程安全的前提下,两个功能:
1)更新index, counter+1
2)填充pointlist 的列表
4.6 c#部分
void Pass_AssignLightsToClusts()
{
ClearLightGirdIndexCounter();
int kernel = cs_AssignLightsToClusts.FindKernel("CSMain");
//Output
cs_AssignLightsToClusts.SetBuffer(kernel, "RWPointLightIndexCounter_Cluster", cb_ClusterPointLightIndexCounter);
cs_AssignLightsToClusts.SetBuffer(kernel, "RWPointLightGrid_Cluster", cb_ClusterPointLightGrid);
cs_AssignLightsToClusts.SetBuffer(kernel, "RWPointLightIndexList_Cluster", cb_ClusterPointLightIndexList);
//Input
cs_AssignLightsToClusts.SetInt("PointLightCount", lightList.Count);
cs_AssignLightsToClusts.SetMatrix("_CameraLastViewMatrix", _camera.transform.worldToLocalMatrix);
cs_AssignLightsToClusts.SetBuffer(kernel, "PointLights", cb_PointLightPosRadius);
cs_AssignLightsToClusts.SetBuffer(kernel, "ClusterAABBs", cb_ClusterAABBs);
cs_AssignLightsToClusts.Dispatch(kernel, m_DimData.clusterDimXYZ, 1, 1);
}
嗯....基本没什么好说的
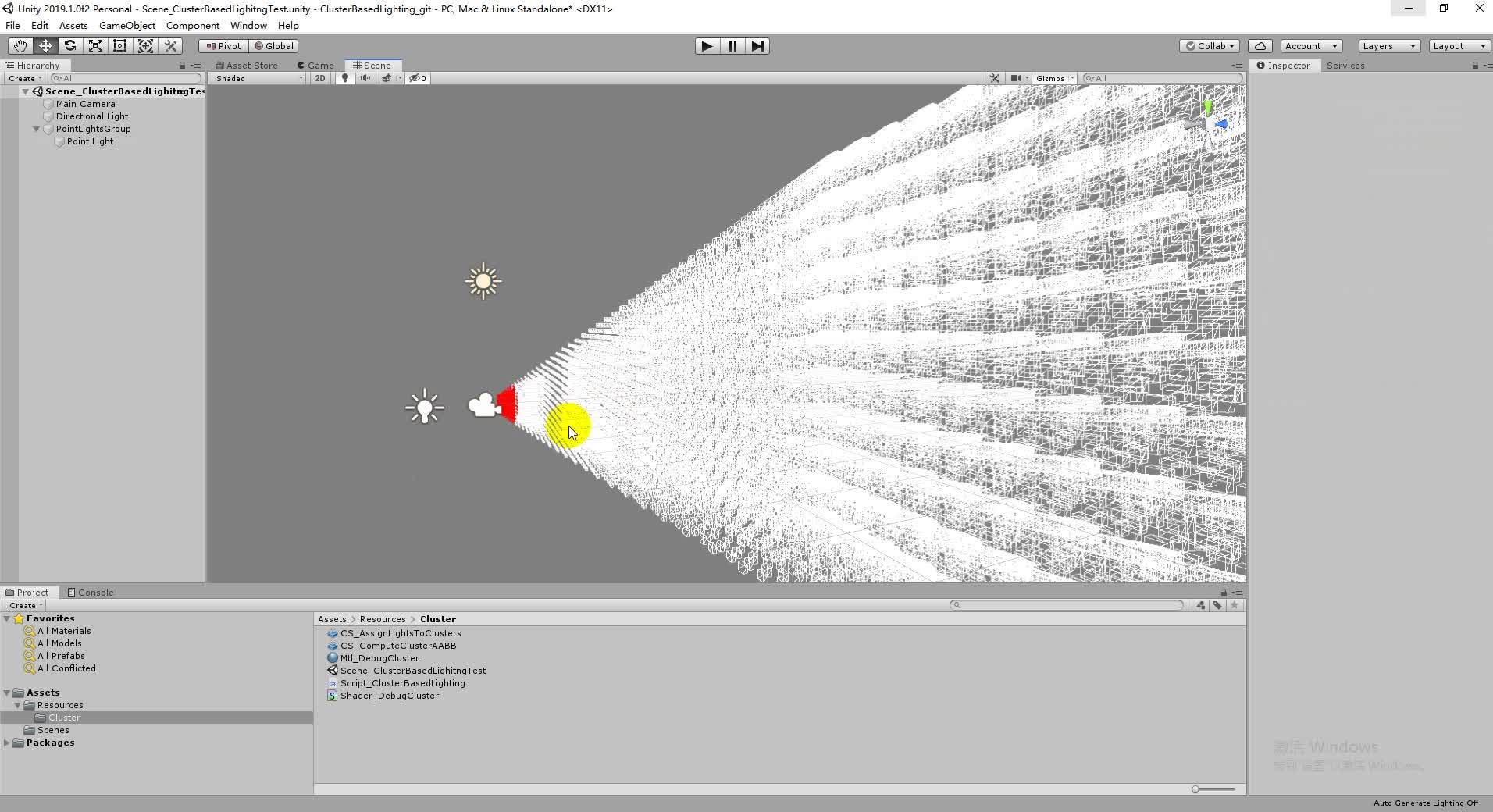
5. 查看求交结果
到了这一步,我们就已经完成整个cluster 与点光源求交的过程了,在debug cluster 里面,我们调试看一眼效果:
首先shader 中加入如下 :
StructuredBuffer<uint2> PointLightGrid_Cluster;
float fClusterLightCount = PointLightGrid_Cluster[clusterID].y;
if (fClusterLightCount > 0)
{
vsOutput.Color = float4(1, 0, 0, 1);
}
在 c# 脚本中,把计算求得的 LightGrid 传入
mtlDebugCluster.SetBuffer("PointLightGrid_Cluster", cb_ClusterPointLightGrid);
搞定~ 这时候,我们已经看到scene 视图下,点光源附近的cluster 已经变成红色的了,所以我们计算没有问题。但是移动摄像机的时候,虽然 cluster cube 跟着动了,但是红色 cube 没有更新,其实是因为,在求交函数中,我们直接使用了点光源的世界坐标,为了能让红色cube 更新,我们需要把点光源的世界坐标,转到camera 下
float4 WorldToView(float4 posWorld)
{
float4 posView = mul(_CameraLastViewMatrix, posWorld);
//posView.z *= -1;
return posView;
}
float3 pointLightPosView = WorldToView(float4(pointLight.xyz, 1)).xyz;// mul(float4(pointLight.xyz, 1), _CameraLastViewMatrix).xyz;
cs_AssignLightsToClusts.SetMatrix("_CameraLastViewMatrix", _camera.transform.worldToLocalMatrix);
封面图get~ 搞定!
6 总结
到目前为止,我们已经完成cluster 与点光源的求交,可以看出来,这里完全是在camera 空间下完成的,没有引入任何的场景,其实,这也反应了cluster 这套流程的一个有点,它并不依赖引擎渲染流程是Forward,还是Deferred.
同时也没有做任何的优化,在下一篇文章,也就是unity 实现详解的最后一片文章,我将会介绍如何在实际场景中,使用cluster。用深度图,去裁剪多余cluster, 结合Indirect 的系列函数,使用类似GpuDriven 的思路,去优化我们的代码,最后完成一个简单的多点光源光照的效果。
谢谢大家~















 6505
6505











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









