自动驾驶汽车硬件系统概述.pdf
目前绝大多数自动驾驶研发车都是改装车辆,相关传感器加装到
车顶,改变车辆的动力学模型;改装车辆的刹车和转向系统,也缺乏
不同的工况和两冬一夏的测试。图中Uber研发用车是SUV车型自身
重心就较高,车顶加装的设备进一步造成重心上移,在避让转向的过
程中转向过急过度,发生碰撞时都会比原车更容易侧翻
硬件在环
司机在环
甚于模器仿真
基于车辆执行
基于实腭道
基于必要的硬件平台
软件在环
车辆在环
自动驾驶研发仿真测试流程
所以在自动驾驶中,安全是自动驾驶技术开发的第一天条。为了
降低和避免实际道路测试中的风险,在实际道路测试前要做好充分的
仿真、台架、封闭场地的测试验证。
软件在环( Software in loop),通过软件仿真来构建自动驾驶
所需的各类场景,复现真实世界道路交通环境,从而进行自动驾驶技
术的开发测试工作。软件在环效率取决于仿真软件可复现场景的程度。
对交通环境与场景的模拟,包括复杂交通场景、真实交通流、自然天
气(雨、雪、雾、夜晚、灯光等)各种交通参与者(汽车、摩托车、
自行车、行人等)。采用软件对交通场景、道路、以及传感器模拟仿
真可以给自动驾驶的环境感知提供卡富的输入可以对算法进行验证
和测试
硬件在环(Hard- ware in1oop),各种传感器类似人的眼睛和
耳朵,作为自动驾驶系统的感知部分,该部分的性能决定了自动驾驶
车辆能否适应复杂多变的交通环境。包括,摄像头、毫米波雷达、超
声波雷达、激光雷达。针对不同的传感器,硬件在环会根据不同的传
感器和环境因素来部署。
车辆在环( Vehicle in loop),车辆执行系统向传动系统发出
执行命令来控制车辆,在自动驾驶中取代了人类的手脚。自动驾驶系
统的执行控制优劣决定了车辆是否能够安仝舒适的行驶。车辆运行在
空旷的场地上,自动驾驶系统感知系统模拟的虚拟场景,自动驾驶系
统根据虚拟的场景发出控制指令,再通过传感器将车辆的实轨迹反
馈到虚拟环境中,实珌真车与虚拟环境的融合,从而进行车辆操控的
验证
司机在环( Driver in loop),基于实时仿真技术开发,结合驾
驶员的实际行为,可以实现对车辆和自动驾驶技术开发测试做出主观
的评价。可机在环,可以一方面获得司机的主观评价,另一方面可以
验证人机共驾驶的功能。
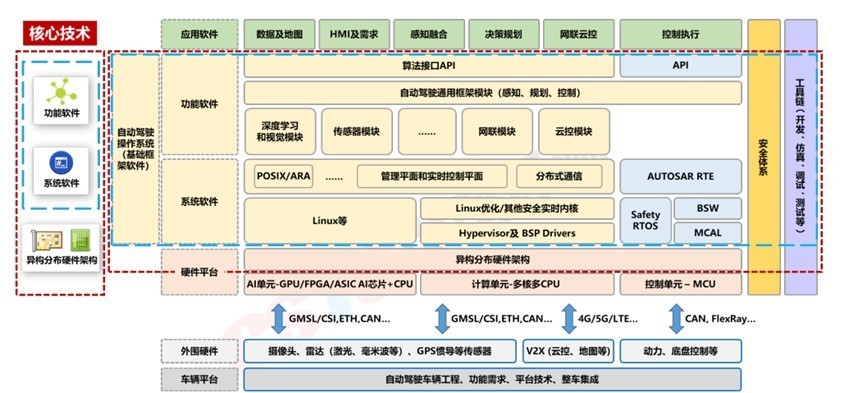
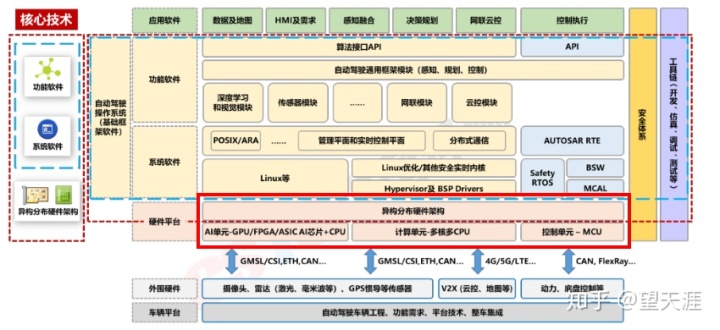
自动驾驶系统的硬件架构
就整体而言,汽车是个全社会化管理的产品,其固有的行业特点
是相对保守的。在人工智能的大潮下,面对造车新势力和消费者需求
变化的冲击,传统汽车行业渐进式的创新方法已经面临巨大的挑战。
急需改变传统的架构和方法不断创新。自动驾驶幣体的硬件架构不光
要考虑系统本身也要考虑人的因素
腰性
酒
司
全雪
快冒
计算单元
m
感知
决策
控制
自动驾驶的硬件架构
自动驾驶系统主要包含三个部分:感知、决策、控制。从整个
硬件的架构上也要充分考虑系统感知、决策、控制的功能要求。整
体设计和生产上要符合相关车规级标准,如IS026262、AECQ-100、
TS16949等相关认证和标准。目前L1、L2、ADAS系统的硬件架构体
系和供应链相对完善符合车规级要求。
感知层:依赖大量传感器的数据,分为车辆运动、环境感知、
驾驶员检测三大类。
车辆运动传感器:速度和角度传感器提供车辆线控系统的相关横
行和纵向信息。惯性导航+全球定位系统=组合导航,提供全姿态信息
参数和高精度定位信息。
环境感知传感器:负责环境感知的传感器类似于人的视觉和听觉,
如果没有环境感知传感器的支撑,将无法实现自动驾驶功能。主要依
靠激光雷达、摄像头、亳米波雷达的数据融合提供给计算单元进行算
法处理。w2X就是周围一切能与车辆发生关的事物进行通信,包括V2V
车辆通信技术、V2Ⅰ与基础设施如红绿灯的通信技术、V2P车辆与行
人的通信。
驾驶员监测传感器:基于摄像头的非接触式和基于生物电传感器
的接触式。通过方向盘和仪表台内集成的传感器,将驾驶员的面部细
节以及心脏、脑电等部位的数据进行收集,再根据这些部位数据变化,
判断驾驶员是否处于走神和疲劳驾驶状态。
计算单元部分:各类传感器采集的数据统一到计算单元处理,为
了保证自动驾驶的实时性要求,软件响应最大延迟必须在可接受的
围内,这对计算的要求非常高。目前主流的解决方案有基于GPU、FPGA
ASIC等
车辆控制:自动驾驶需要用电信号控制车辆的转向、制动、油门
系统,其中涉及到车辆地盘的线控改装,目前在具备自适应巡航、紧
急制动、白动泊车功能的车上可以直接借用原车的系统,通过CAN总
线控制而不需要过度改装
警告系统:主要是通过声音、图像、振动提醒司机注意,通过HMI
的设计有效减少司机困倦、分心的行为。
、自动驾驶的传感器
光雷詁
围憬头
毫来述
组合导
自动驾驶的传感








 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 531
531











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









