






Roboguide软件左侧浏览树中的“Parts”节点专门用于添加工件资源,工件资源同样支持添加自带的库文件数模以及外部导入的CSB、DXF、STL、IGES、3DS等格式CAD数模。
弧焊机器人使用的工具是弧焊焊枪,在进行仿真之前需要将弧焊焊枪安装到机器人上,并设置焊枪尖端为机器人TCP。
本期,我们介绍一下导入CSB格式焊接工件,并将工件安装到与变位机上,同时介绍安装弧焊焊枪到机器人。
一、添加工件到变位机
1.右击左侧浏览树中的Parts,在弹出的快捷菜单中依次点击“Add Part”→“Single CAD File”,如下图所示。
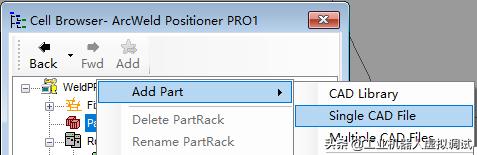
“Add Part”→“Single CAD File”
2.在弹出的浏览对话框中,浏览到焊接工件存放位置,选择焊接工件TEACHING_JIG_HighQuality.CSB,如下图所示,点击打开按钮。

选择焊接工件
焊接工件被添加到软件工作区,同时弹出工件属性对话框,如下图所示,点击OK按钮。
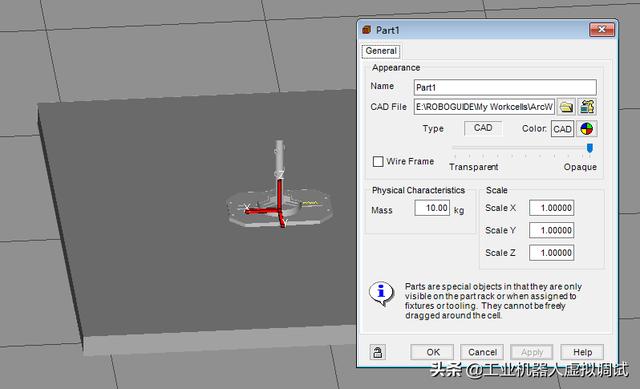
焊接工件在软件中显示
3.左侧浏览树中,依次展开选项“Machines”→“2-Axes Servo Positioner (500kg)”→“2-Axes Servo Positioner J1”,然后在其下双击2-Axes Servo Positioner J2,弹出变位机J2轴属性对话框,如下图所示。
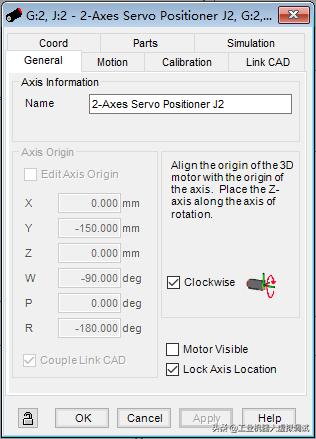
变位机J2轴属性对话框
4.点击上方的Parts属性标签,在下方的Parts显示区域下,勾选Part1,如下图所示,点击OK按钮。
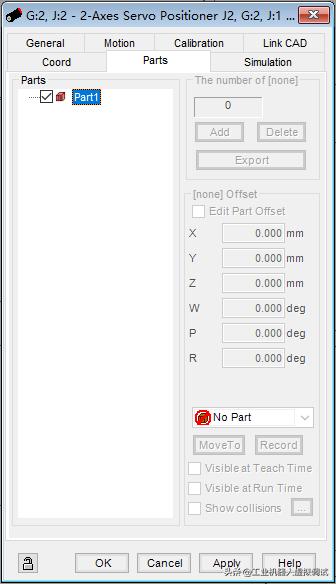
设置Parts属性
此时,焊接工件被安装到机器人变位机上,如下图所示。
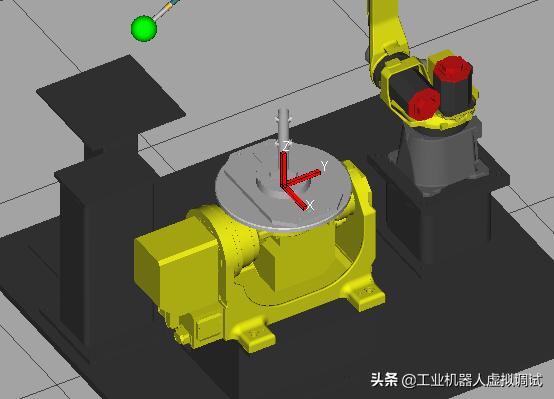
工件安装到变位机上
二、安装焊枪到机器人
1.左侧浏览树中,展开机器人下的Tooling,双击其下的UT:1(Eoat1),弹出机器人工具属性对话框,如下图所示。
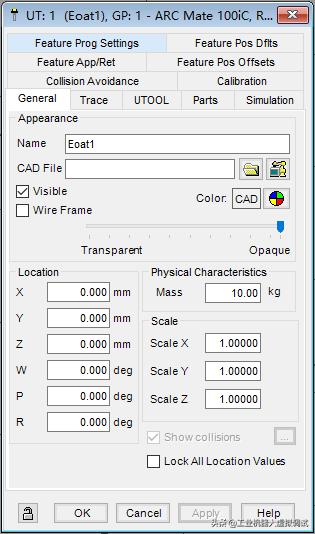
机器人工具属性对话框
2.确认已选择“General”属性标签,点击CAD File后的“打开库文件”按钮,弹出库文件对话框,如下图所示。
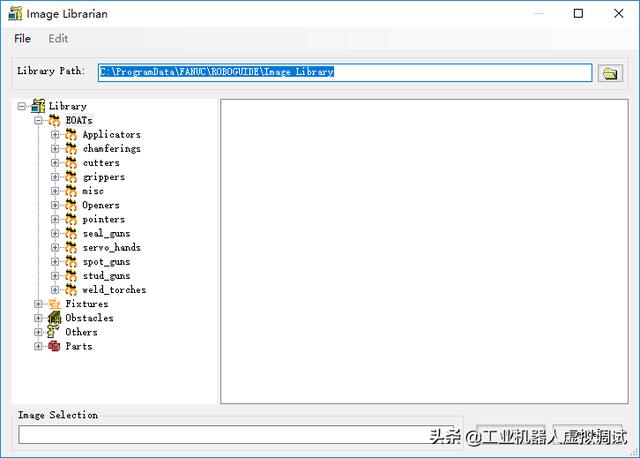
库文件对话框
3.在库文件对话框中,选择焊枪BINZEL_ABIROB_350GC_30S_GasNozzle_Straight,如下图所示,点击OK按钮。
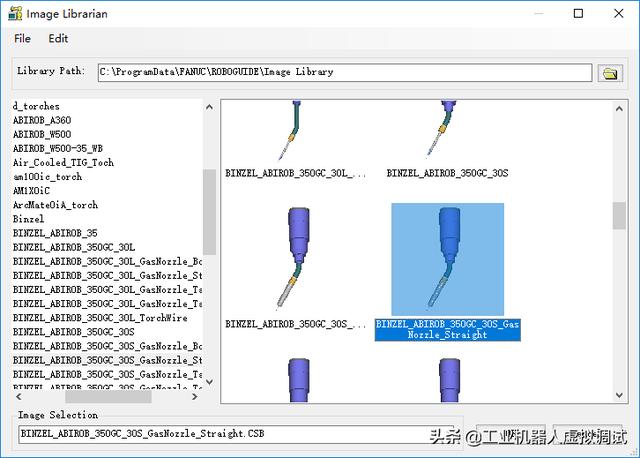
选择焊枪
4.在机器人工具属性对话框中,勾选下方的Lock All Location Values,点击Apply按钮,焊枪被安装到机器人上,如下图所示。
焊枪安装到机器上
5.在机器人工具属性对话框中,点击上方的UROOL属性标签,为机器人设置TCP位置,勾选Edit UTOOL,左侧坐标输入框中依次设置( X , Y , Z , W , P , R ) = ( -84 , 0 , 361 , 180 , -30 , 0 ),点击OK按钮。
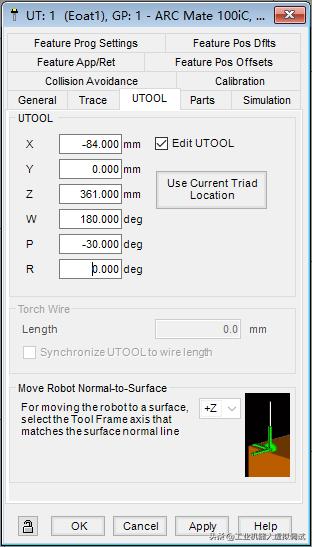
设置TCP位置
此时,机器人TCP移动到焊枪末端,如下图所示,点击工具栏上的“Save Cell”图标,保存工作站。
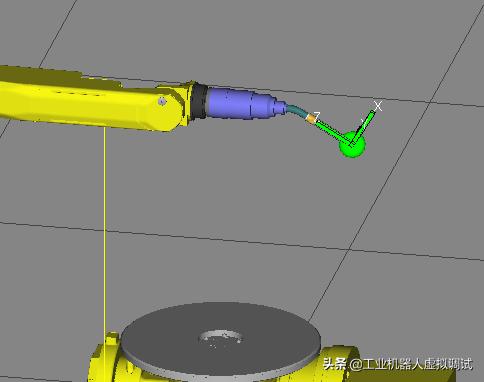
机器人TCP移动到焊枪末端
The End
FANUC机器人虚拟仿真教程:Roboguide弧焊仿真工作站工装添加

















 1500
1500

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









