






最开始接触姿态结算的时候,四元数、欧拉角和方向余弦矩阵的相互转化便是在进阶路上的一条小老虎,看的多了,终于也算熟悉了。
引用别人的“凡是把一本书读100遍的人,没有一个人不成大器”这句话,希望对大家有所勉励。
基础理论
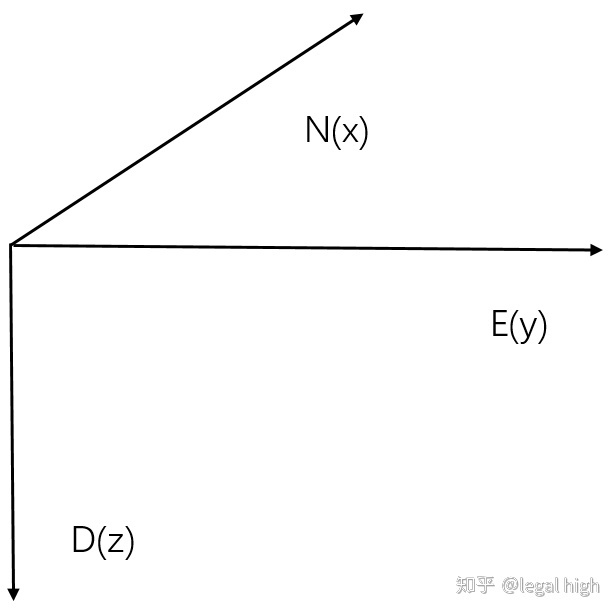
对于在三维空间里的一个参考系,任何坐标系的取向,都可以用三个欧拉角
来表现,一个与参考系重合的坐标系,通过绕 Z 轴的偏航角(Yaw),绕 Y 轴的
俯仰角(Pitch)和绕 X 轴的横滚角(Roll)旋转到当前姿态,常用坐标系如下:
一、方向余弦矩阵 (参考《捷联惯性导航技术》张天光等)
假定初始时刻载体坐标系和世界坐标系重合, 那么任一向量在载体坐标系和世界坐标系中的表达式相同, 即
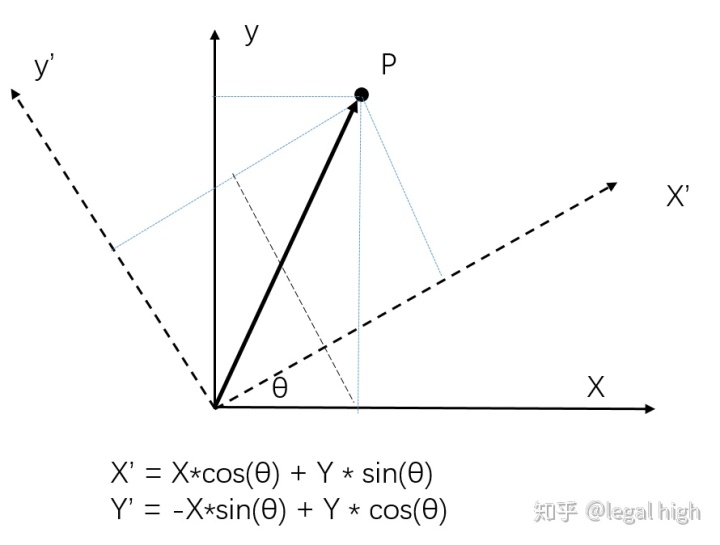
推导如图:
再绕 Y 轴旋转角度
再绕 X 轴旋转角度
此时
因此从世界坐标系到载体坐标系的变换矩阵可由下式给出
那么,从载体坐标系到世界坐标系的转变矩阵可以表示如下:
此外,注意到当姿态角很小的时候,
二、欧拉角与四元数
按Z-Y-X的旋转变换顺序有:
四元数与旋转矩阵(常用来做坐标变换)
2.1 b系转到R系的坐标变换矩阵
2.2 R系转到b系的坐标变换矩阵
对比R和
三、四元数的更新
Q对时间求导数:
因为
所以
所以
代码实现:
void abcd2cbn(strcut* data)
{
float a, b, c, d, ab, ac, ad, bb, bc, bd, cc, cd, dd;
a = data->q0
b = data->q1
c = data->q2
d = data->q3
ab = a * b;
ac = a * c;
ad = a * d;
bb = b * b;
bc = b * c;
bd = b * d;
cc = c * c;
cd = c * d;
dd = d * d;
data.cbn11 = 1 - 2 * (cc + dd);
data.cbn12 = 2 * (bc - ad);
data.cbn13 = 2 * (bd + ac);
data.cbn21 = 2 * (bc + ad);
data.cbn22 = 1 - 2 * (bb + dd);
dataa.cbn23 = 2 * (cd - ab);
data.cbn31 = 2 * (bd - ac);
data.cbn32 = 2 * (cd + ab);
data.cbn33 = 1 - 2 * (bb + cc);
}













 213
213











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









