






~欢迎关注~
微信公众号:古月居
新浪微博:古月春旭
知乎专栏:古月居
原文链接:ROS 2 gazebo仿真入门
gazebo是ROS中常用的三维物理仿真环境,在ROS 2中已经支持,这里我们就来小试牛刀。
前提条件
已经安装了ROS 2和gazebo 9(或者ROS melodic) 安装接口
$ sudo apt install ros-crystal-gazebo-ros-pkgs
一、gazebo例程跑起来
gazebo例程跑起来:
$ gazebo --verbose /opt/ros/crystal/share/gazebo_plugins/worlds/gazebo_ros_diff_drive_demo.world终端中可以看到如下加载信息:

gazebo仿真环境很快就会打开:
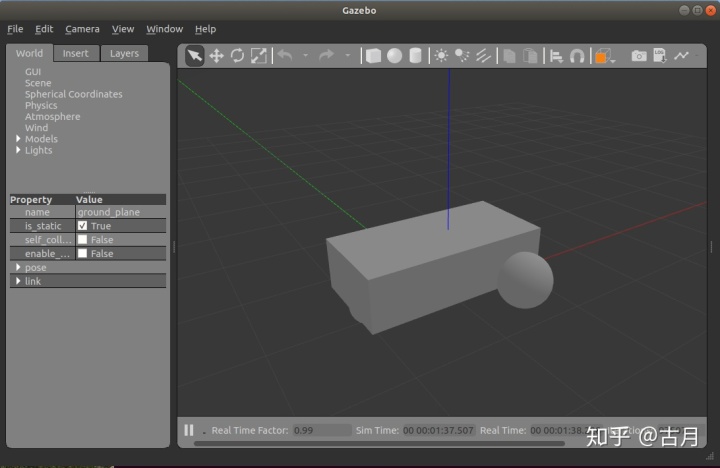
想要看看系统有没有跑起来,关键是看话题有没有发布/订阅:

可以看到,其中有一个cmd_demo的话题,相当于ROS 1中的cmd_vel,发布该话题就可以让gazebo中的小车模型动起来了:
$ ros2 topic pub /demo/cmd_demo geometry_msgs/Twist '{linear: {x: 1.0}}' -1小车很快就会动起来:

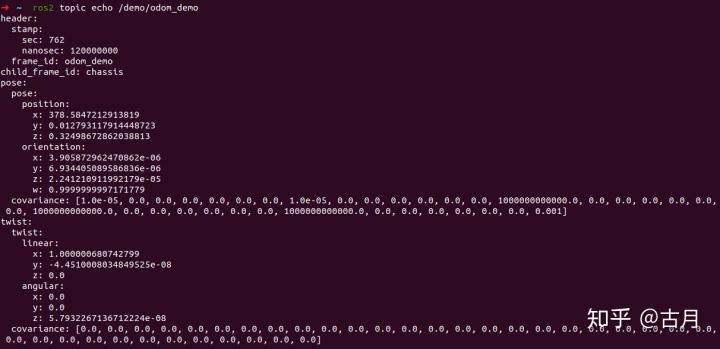
话题列表中还有一个odom_demo,可以实时反馈小车的里程计信息:
二、探究仿真背后的内容
gazebo仿真例程跑起来了,各种数据我们也都可以看到,回过头来,我们再看下运行以上例程的文件gazebo_ros_diff_drive_demo.world,该文件可以在以下路径中找到:
gazebo_ros_diff_drive_demo.world文件内容并不算多,主要是sdf模型文件的描述。
头部注释里是该例程的使用方法,大家也都可以试一下:
Gazebo ROS differential drive plugin demo
Try sending commands:
ros2 topic pub /demo/cmd_demo geometry_msgs/Twist '{linear: {x: 1.0}}' -1
ros2 topic pub /demo/cmd_demo geometry_msgs/Twist '{angular: {z: 0.1}}' -1
Try listening to odometry:
ros2 topic echo /demo/odom_demo
Try listening to TF:
ros2 run tf2_ros tf2_echo odom chassis
ros2 run tf2_ros tf2_echo chassis right_wheel
ros2 run tf2_ros tf2_echo chassis left_wheel接下来是sdf模型相关的描述,除了ground和sun模型的调用外,重点是小车模型vehicle的描述,和URDF建模的语法差别不大:
<model name='vehicle'>
<pose>0 0 0.325 0 -0 0</pose>
<link name='chassis'>
<pose>-0.151427 -0 0.175 0 -0 0</pose>
<inertial>
<mass>1.14395</mass>
<inertia>
<ixx>0.126164</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.416519</iyy>
<iyz>0</iyz>
<izz>0.481014</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<box>
<size>2.01142 1 0.568726</size>
</box>
</geometry>
</visual>
<collision name='collision'>
<geometry>
<box>
<size>2.01142 1 0.568726</size>
</box>
</geometry>
</collision>
</link>
<link name='left_wheel'>
<pose>0.554283 0.625029 -0.025 -1.5707 0 0</pose>
<inertial>
<mass>2</mass>
<inertia>
<ixx>0.145833</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.145833</iyy>
<iyz>0</iyz>
<izz>0.125</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<sphere>
<radius>0.3</radius>
</sphere>
</geometry>
</visual>
<collision name='collision'>
<geometry>
<sphere>
<radius>0.3</radius>
</sphere>
</geometry>
<surface>
<friction>
<ode>
<mu>1</mu>
<mu2>1</mu2>
<slip1>0</slip1>
<slip2>0</slip2>
</ode>
</friction>
<contact>
<ode>
<soft_cfm>0</soft_cfm>
<soft_erp>0.2</soft_erp>
<kp>1e+13</kp>
<kd>1</kd>
<max_vel>0.01</max_vel>
<min_depth>0.01</min_depth>
</ode>
</contact>
</surface>
</collision>
</link>
<link name='right_wheel'>
<pose>0.554282 -0.625029 -0.025 -1.5707 0 0</pose>
<inertial>
<mass>2</mass>
<inertia>
<ixx>0.145833</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.145833</iyy>
<iyz>0</iyz>
<izz>0.125</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<sphere>
<radius>0.3</radius>
</sphere>
</geometry>
</visual>
<collision name='collision'>
<geometry>
<sphere>
<radius>0.3</radius>
</sphere>
</geometry>
<surface>
<friction>
<ode>
<mu>1</mu>
<mu2>1</mu2>
<slip1>0</slip1>
<slip2>0</slip2>
</ode>
</friction>
<contact>
<ode>
<soft_cfm>0</soft_cfm>
<soft_erp>0.2</soft_erp>
<kp>1e+13</kp>
<kd>1</kd>
<max_vel>0.01</max_vel>
<min_depth>0.01</min_depth>
</ode>
</contact>
</surface>
</collision>
</link>
<link name='caster'>
<pose>-0.957138 -0 -0.125 0 -0 0</pose>
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.1</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.1</iyy>
<iyz>0</iyz>
<izz>0.1</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<sphere>
<radius>0.2</radius>
</sphere>
</geometry>
</visual>
<collision name='collision'>
<geometry>
<sphere>
<radius>0.2</radius>
</sphere>
</geometry>
</collision>
</link>
<joint name='left_wheel_joint' type='revolute'>
<parent>chassis</parent>
<child>left_wheel</child>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1.79769e+308</lower>
<upper>1.79769e+308</upper>
</limit>
</axis>
</joint>
<joint name='right_wheel_joint' type='revolute'>
<parent>chassis</parent>
<child>right_wheel</child>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1.79769e+308</lower>
<upper>1.79769e+308</upper>
</limit>
</axis>
</joint>
<joint name='caster_wheel' type='ball'>
<parent>chassis</parent>
<child>caster</child>
</joint>重点是最下边的差速控制器插件配置,其中的参数配置和ROS 1是一致的:
<plugin name='diff_drive' filename='libgazebo_ros_diff_drive.so'>
<ros>
<namespace>/demo</namespace>
<argument>cmd_vel:=cmd_demo</argument>
<argument>odom:=odom_demo</argument>
</ros>
<!-- wheels -->
<left_joint>left_wheel_joint</left_joint>
<right_joint>right_wheel_joint</right_joint>
<!-- kinematics -->
<wheel_separation>1.25</wheel_separation>
<wheel_diameter>0.6</wheel_diameter>
<!-- limits -->
<max_wheel_torque>20</max_wheel_torque>
<max_wheel_acceleration>1.0</max_wheel_acceleration>
<!-- output -->
<publish_odom>true</publish_odom>
<publish_odom_tf>true</publish_odom_tf>
<publish_wheel_tf>true</publish_wheel_tf>
<odometry_frame>odom_demo</odometry_frame>
<robot_base_frame>chassis</robot_base_frame>
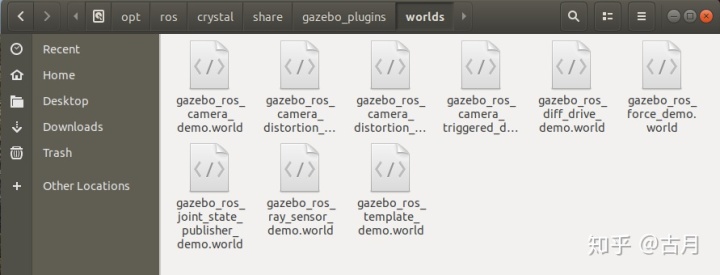
</plugin>三、更多仿真例程
在以上例程同样的路径下,还可以看到不少其他gazebo仿真例程,包含了多种传感器和常用功能:
这里仅以其中一个传感器的demo为例进行演示:
$ gazebo --verbose /opt/ros/crystal/share/gazebo_plugins/worlds/gazebo_ros_ray_sensor_demo.world
启动后可以看到如下gazebo界面:

该仿真包含的传感器有:激光、点云、声纳。
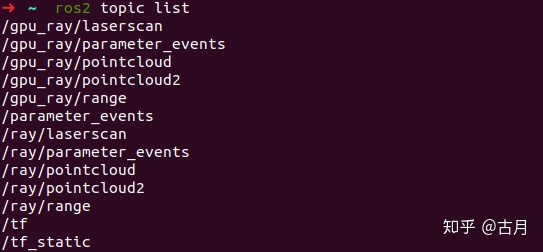
在rviz中可以看到这些传感器的可视化效果:

更多内容欢迎关注:
微信公众号:古月居 (guyue_home)
新浪微博:古月春旭
或访问古月居网站:
古月居 - 怕什么真理无穷,进一寸有一寸的欢喜www.guyuehome.com














 4908
4908











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









