






卡尔曼滤波
很早以前就听过卡尔曼滤波这个概念,但是一直没怎么接触过,而这个东西似乎又涉及挺广的,哪哪都能见到,哪哪都能用。今天想根据我了解的内容做一个整理。
概念
卡尔曼滤波(Kalman Filtering)是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。
Kalman滤波在测量方差已知的情况下能够从一系列存在测量噪声的数据中,估计动态系统的状态。
常在控制、制导、导航、通讯等领域使用。目前已经发展了很多变体,扩展到更多领域,如计算机视觉。
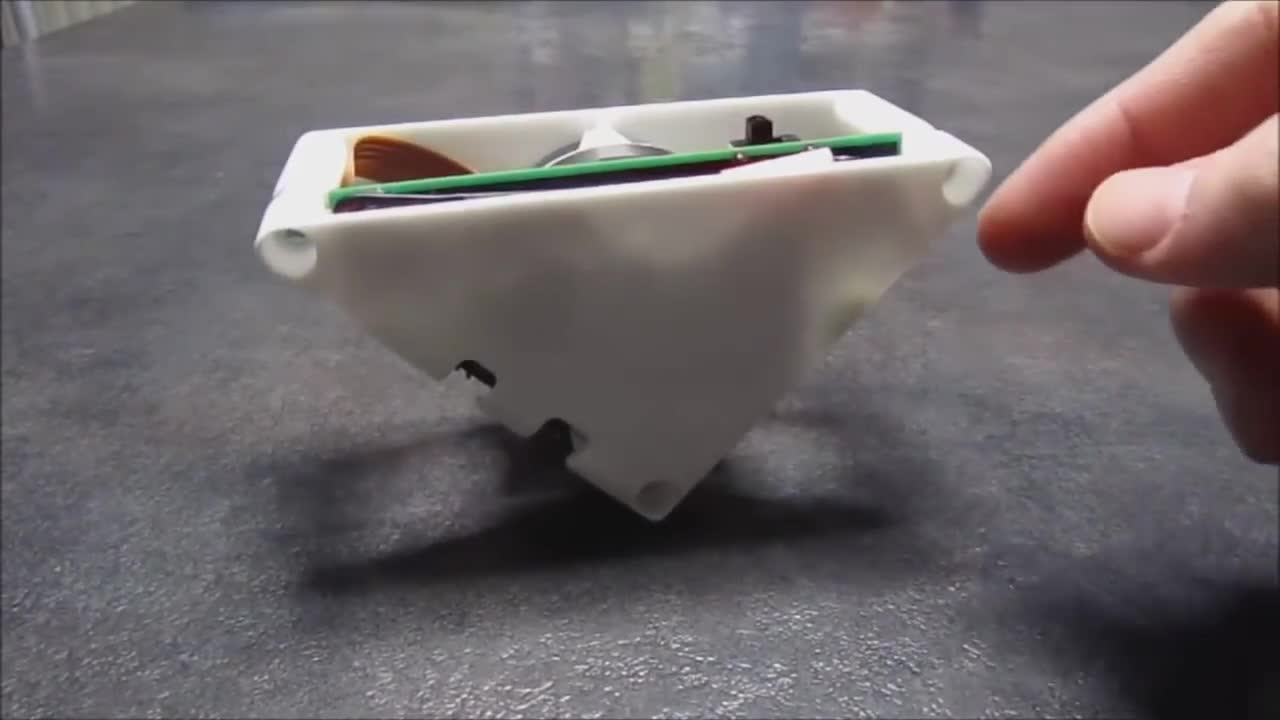
这个是一个网友只做的倒立摆,采用使用陀螺仪与两轴加速度计卡尔曼滤波器进行状态估计。
第一次使用
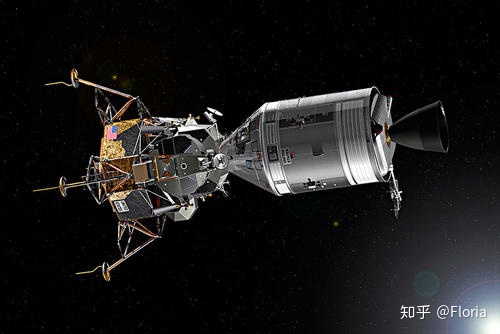
斯坦利·施密特(Stanley Schmidt)首次实现了卡尔曼滤波器。卡尔曼在NASA埃姆斯研究中心访问时,发现他的方法对于解决阿波罗计划的轨道预测很有用,后来阿波罗飞船的导航电脑使用了这种滤波器。关于这种滤波器的论文由Swerling (1958), Kalman (1960)与 Kalman and Bucy (1961)发表。
卡尔曼滤波器
状态观测器
比如,你想要知道你喜欢的女生现在心情是好还是差,那你可以递给她一个小零食,假如她接受并笑了,说明她现在心情不差。这个过程就是状态观测。
状态观测可以帮助你估计你无法直接观察或者测量的信息。
一般用
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1218
1218











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









