






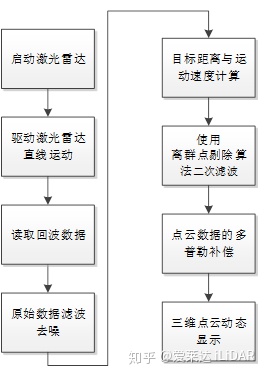
实验流程:
实验中的目标物体:

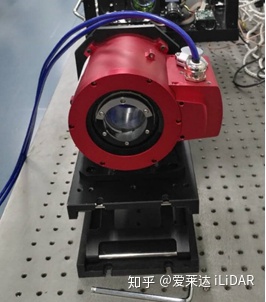
实验中的扫描器采用的是旋转双棱镜,已在旋转双棱镜圆环扫描原理中介绍,实物图如下:
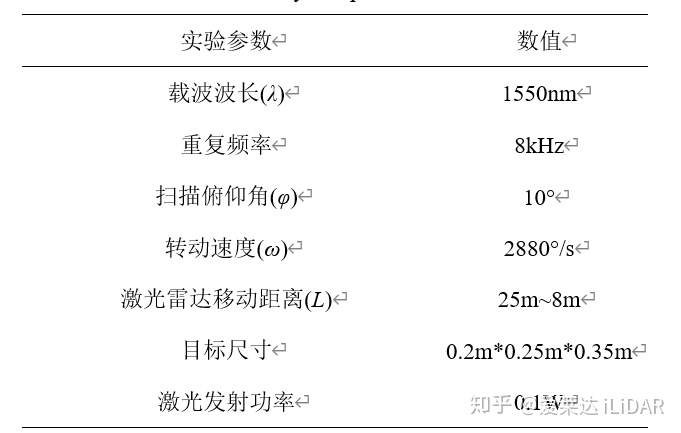
通过旋转双棱镜控制算法,本实验中采用圆环扫描方式,实验参数如下:
实验中目标物体静止不动,激光雷达放置在小推车上,手动推动小

实验流程:
实验中的目标物体:
实验中的扫描器采用的是旋转双棱镜,已在旋转双棱镜圆环扫描原理中介绍,实物图如下:
通过旋转双棱镜控制算法,本实验中采用圆环扫描方式,实验参数如下:
实验中目标物体静止不动,激光雷达放置在小推车上,手动推动小
 6253
5292
4008
6253
5292
4008











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















