







 本文介绍了台达ASDA伺服的定位控制案例,包括原点回归、相对定位和绝对定位的实现。通过台达PLC与伺服驱动器的硬件接线,配合详细控制程序,阐述了不同定位动作的执行过程,同时提供了伺服参数设置的注意事项和异常处理方法。
本文介绍了台达ASDA伺服的定位控制案例,包括原点回归、相对定位和绝对定位的实现。通过台达PLC与伺服驱动器的硬件接线,配合详细控制程序,阐述了不同定位动作的执行过程,同时提供了伺服参数设置的注意事项和异常处理方法。
↑ 点击上方“伺服与运动控制”关注我们
今天主要分享的是关于台达 ASDA 伺服的相关控制案例,主要有以下的内容:
台达 ASDA 伺服定位演示系统
控制要求
1、由台达 PLC 和台达伺服组成一个简单的定位控制演示系统。通过 PLC 发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。
2、z 监控画面:原点回归、相对定位、绝对定位。
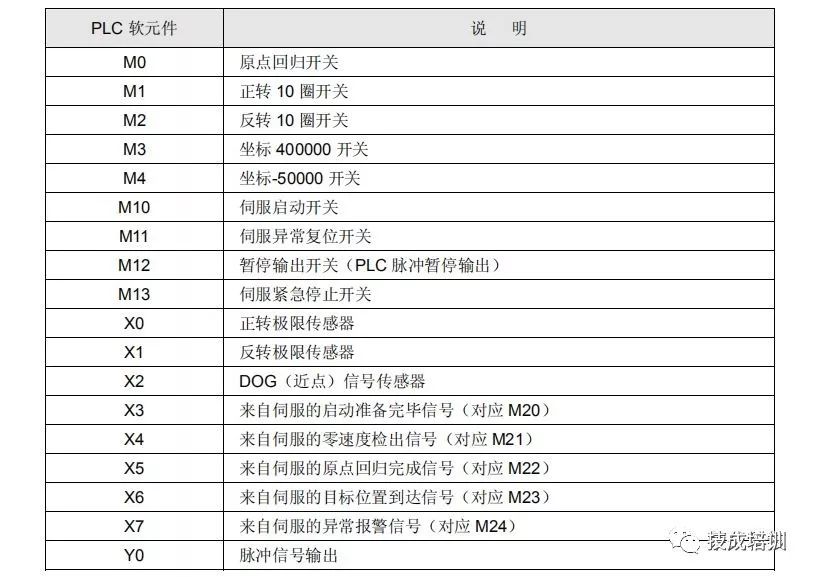
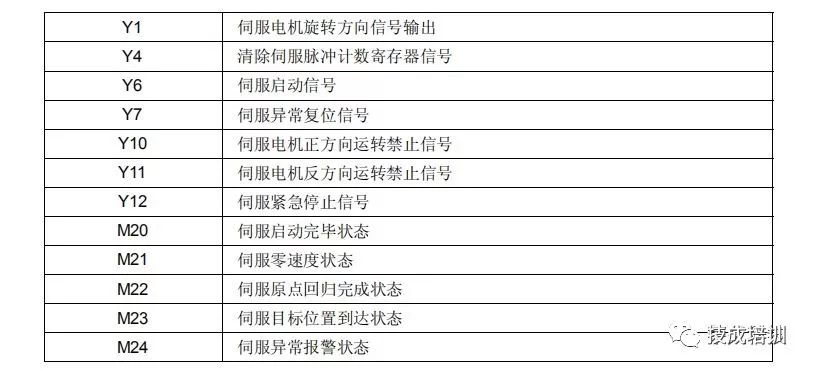
元件说明
ASD-A 伺服驱动器参数必要设置
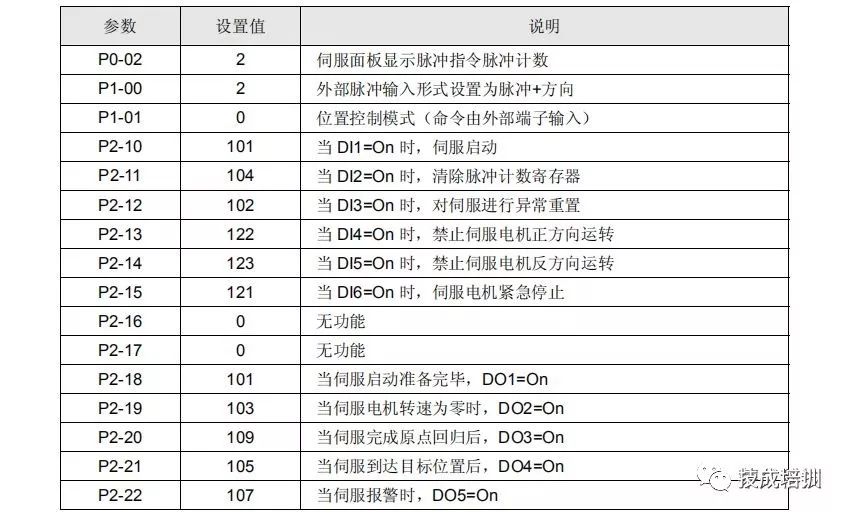
当出现伺服因参数设置错乱而导致不能正常运行时,可先设置 P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。
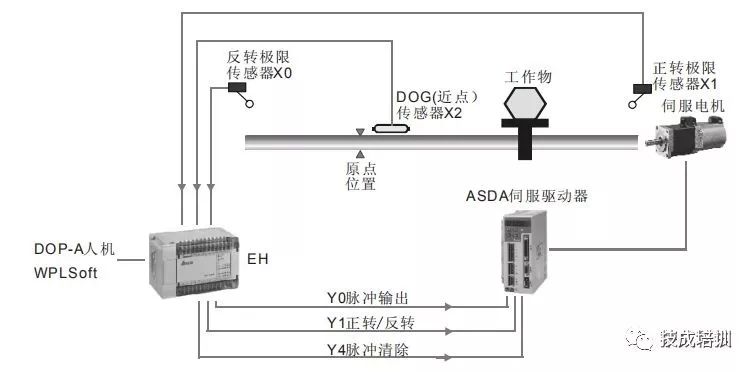
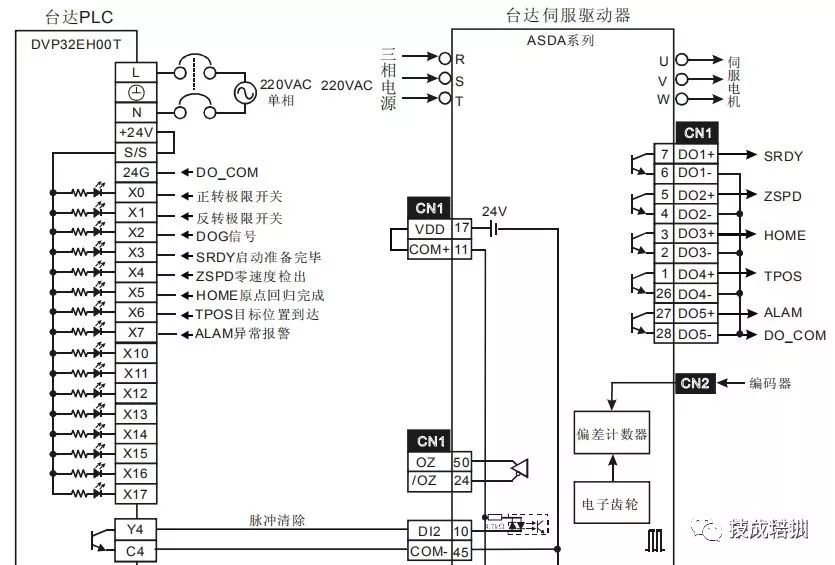
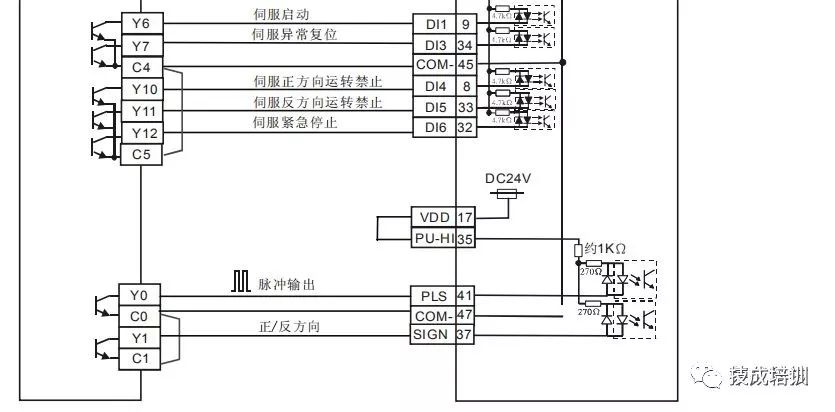
PLC 与伺服驱动器硬件接线图
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









