







 超级会员免费看
超级会员免费看
teleop_rviz_plugin(1)
今天我们来看一下Far planner的rviz插件。也就是运行roslauch far planner far planner.launch的时候的那个rviz。
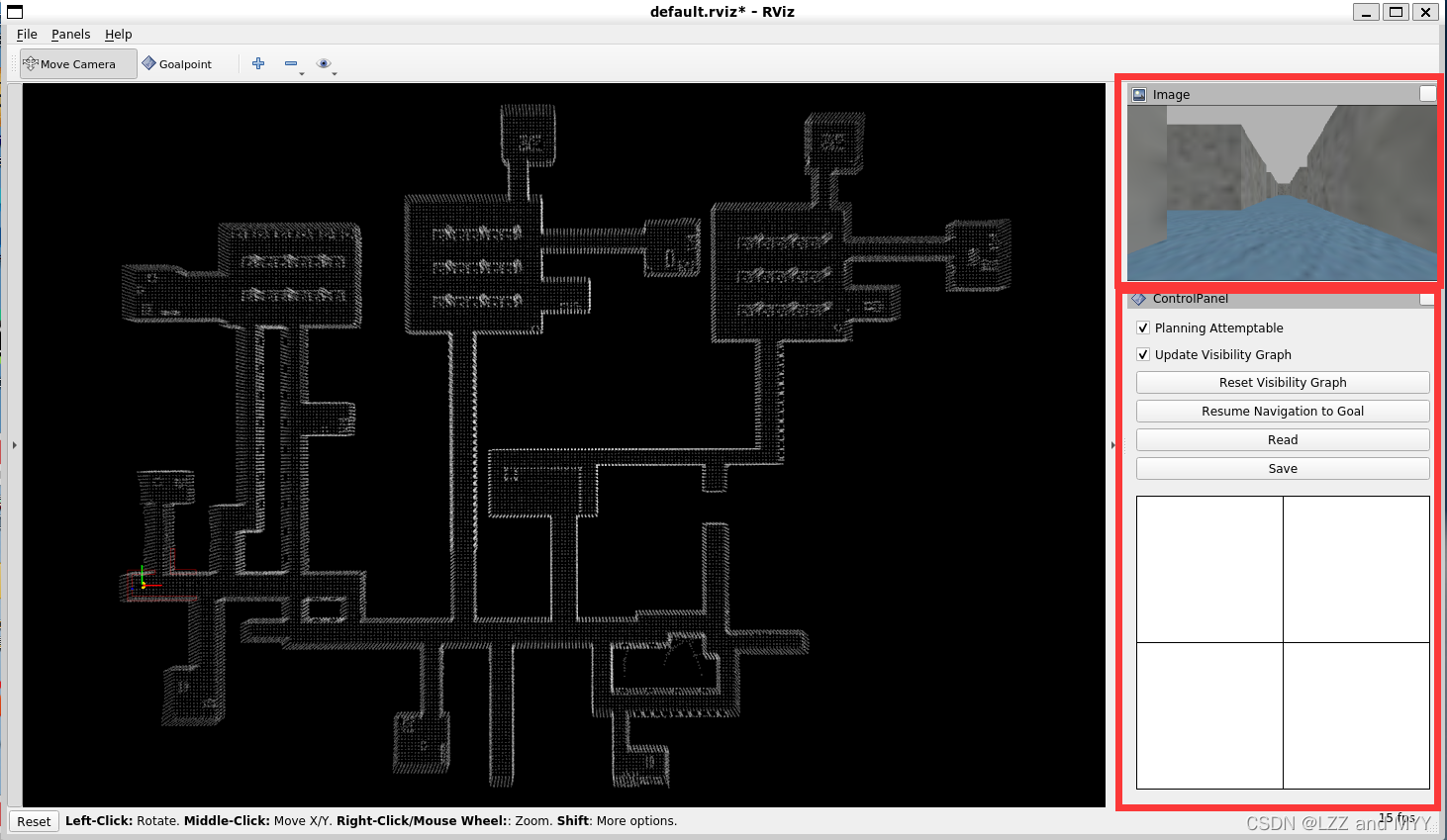
主要的部分就是右侧的两大块内容了。其中对应的代码有四个。我们先来看teleop_panel.h
teleop_panel.h
#ifndef TELEOP_PANEL_H
#define TELEOP_PANEL_H
#ifndef Q_MOC_RUN
# include <ros/ros.h>
# include <rviz/panel.h>
#endif
#include <stdio.h>
// 和Qt相关的头文件
#include <QPainter>
#include <QVBoxLayout>
#include <QHBoxLayout>
#include <QTimer>
#include <QPushButton>
#include <QCheckBox>
#include <QFileDialog>
#include <std_msgs/E
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











