







 超级会员免费看
超级会员免费看
今天我们讲的是首次运行时候的情况梳理。篇幅可能有点长,但是看完肯定会有收获的。我们把之前讲过的东西都串起来,形成一个完整的过程。
far_planner一开始进入到loop的时候,它是先更新odom的位置信息,如下:
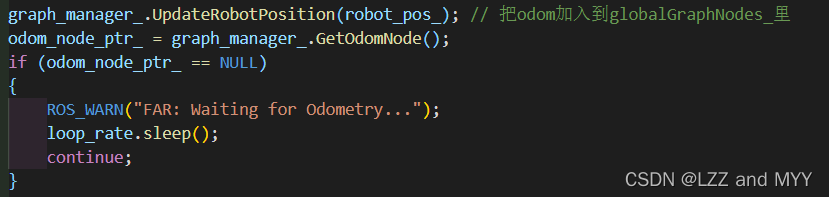
它会把机器人的odom加入到globalGraphNodes_ 里(这个很重要哦!是全局地图),程序接着往下走:
通过BuildTerrainImgAndExtractContour函数,我们可以得到一个由激光映射到平面几何的图形顶点容器realworld_contour_。
通过UpdateContourGraph函数,我们填充realworld_contour_里面的点的属性,把他们变成ctnode,并且组成contour_graph_(我们可以认为这个contour_graph是一个local层面的

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 977
977











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











