







1.非ROS版+
参考链接:
安装步骤:
1.(打开终端:ctrl+alt+T)安装依赖环境(cmake,google-glog,gflags,BLAS & LAPACK,Eigen3,SuiteSparse and CXSparse,Boost,OpenCV 2.4-3.0
sudo apt-get install cmake
sudo apt-get install libgoogle-glog-dev
sudo apt-get install libatlas-base-dev
sudo apt-get install libeigen3-dev
sudo apt-get install libsuitesparse-dev
sudo apt-get install libboost-dev libboost-filesystem-dev
sudo apt-get install libopencv-dev2.下载MYNT-EYE-S-SDK并安装,具体步骤见github
https://github.com/slightech/MYNT-EYE-S-SDK
(1)下载MYNT-EYE-S-SDK:
git clone https://github.com/slightech/MYNT-EYE-S-SDK(2)安装及最后的效果图:
cd MYNT-EYE-S-SDK
make init
make sample
./sample/_output/bin/device/camera_d
3.添加 MYNT-EYE-SDK 路径到环境变量。
1)打开.bashrc文件
gedit ~/.bashrc
在最后添加 export MYNTEYE_SDK2_ROOT='MYNT-EYE-S-SDK INSTALL PATH'
然后保存并source ~/.bashrc
4.安装依赖,按照原始 OKVIS 步骤安装 MYNT-EYE-OKVIS-Sample
详细参考网址:https://github.com/slightech/MYNT-EYE-OKVIS-Sample
1)下载OKVIS
git clone -b mynteye https://github.com/slightech/MYNT-EYE-OKVIS-Sample.git
cd MYNT-EYE-OKVIS-Sample/
mkdir build && cd build
2)然后编译
cmake -DCMAKE_BUILD_TYPE=Release ..
make -j43)获取相机标定参数
cd MYNT-EYE-S-SDK
./samples/_output/bin/tutorials/get_img_params4)运行MYNTEYE OKVIS
cd MYNT-EYE-OKVIS-Sample/build
./okvis_app_mynteye_s ../config/config_mynteye.yaml注意:这里,可能会报以下错误:
/okvis_app_mynteye_s: error while loading shared libraries: libmynteye.so.2: cannot open shared object file: No such file or directory解决方法:找到 libmynteye.so.2 的路径,并建立链接。
find / -name libmynteye.so.2输出:
/home/youngo/MYNT-EYE-S-SDK/_output/lib/libmynteye.so.2打开/etc/ld.so.conf,添加/home/youngo/MYNT-EYE-S-SDK/_output/lib,然后保存。
cd /etc/
sudo ldconfig然后重新:
cd MYNT-EYE-OKVIS-Sample/build
./okvis_app_mynteye_s ../config/config_mynteye.yaml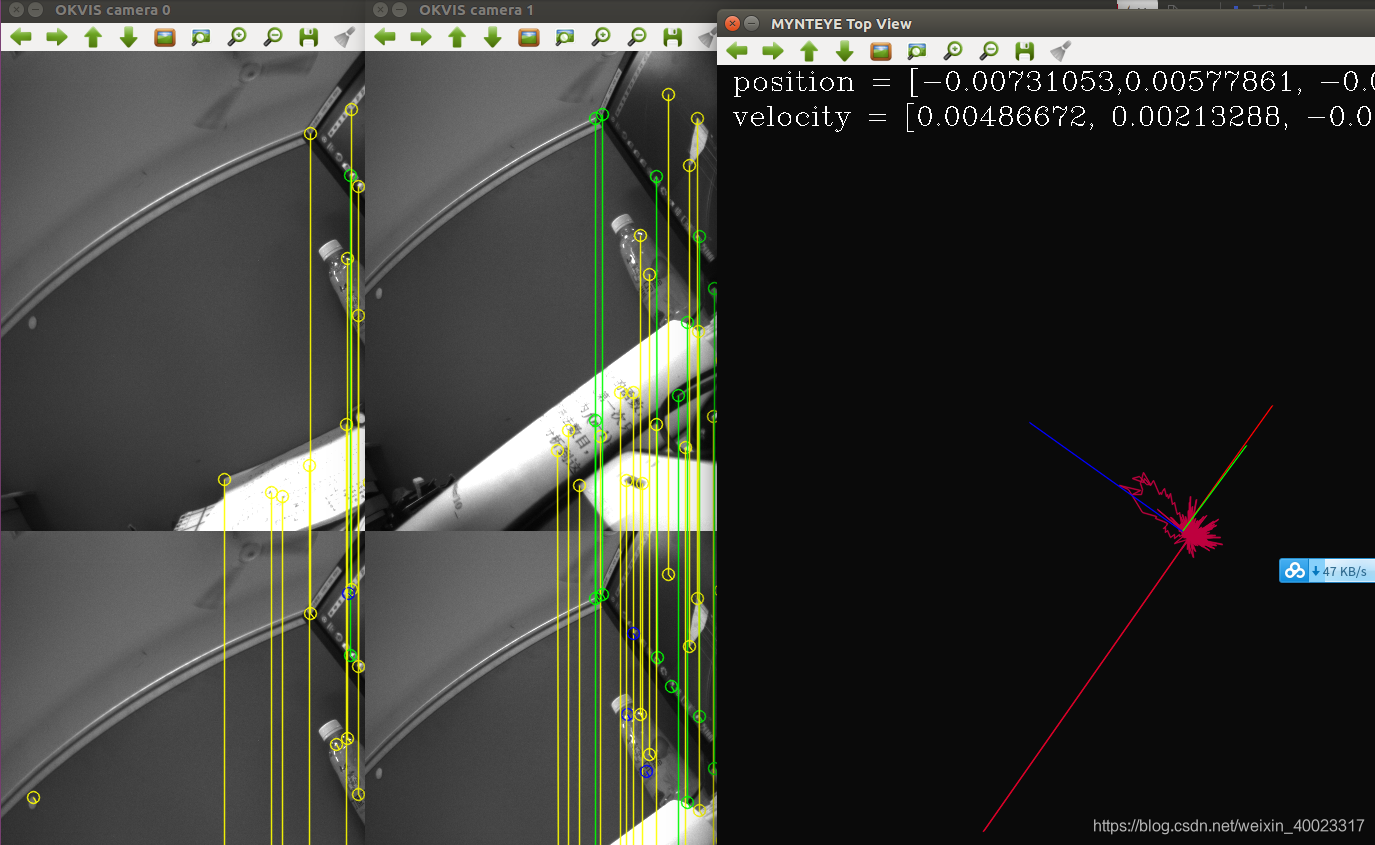















 4849
4849











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









