







本文主要介绍如何判定一条线和一个立方体相交
1、Slabs的使用(2D的介绍)
2、将Slabs推广到3D
其中只介绍数学相关,代码实现可自行实现
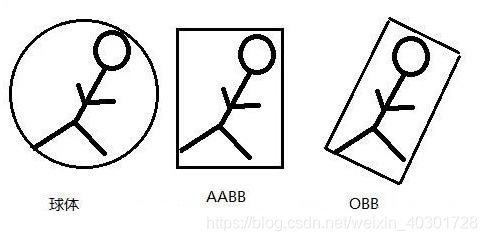
检测物体碰撞的时候,我们通常在物体表面添加包围盒,其中常用的包围盒有如下三种,其中Slabs主要适用于AABB包围盒
OBB比包围球和AABB更加逼近物体,能显著减少包围体的个数。因此,人们通常进行两个回合的碰撞/相交检测,用包围球做第一回合的快速测试,用OBB进行第二回合的测试。第一回合的测试可以剔除大多数不可见或不必裁剪的物体,这样不必进行第二回合测试的几率就会大得多。
1、Slabs的使用(2D的介绍)
如果一条射线与有长方形构成的AABB区域相交,则该射线在x-slab和y-slab之间的线段有相交,如下图所示:
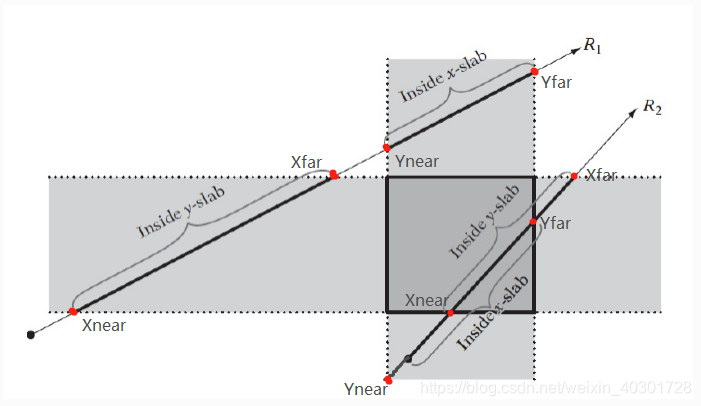
定义四个点,分别叫做 xnear,xfar,ynear,yfar,分别对应射线与长方形两条横线的两个交点,射线与长方形两条竖线的两个交点,如图所示
我们假设射线为 L ( t ) = t d ⃗ + P L(t) =t\vec{d}+P L(t)=td+P,其中P为射线起点, d ⃗ \vec{d} d为射线的方向,那么此时,上述四个点可以表示为
t x n e a r d ⃗ + P , t x f a r d ⃗ + P , t y n e a r d ⃗ + P , t y f a r d ⃗ + P t_{xnear}\vec{d}+P,t_{xfar}\vec{d}+P,t_{ynear}\vec{d}+P,t_{yfar}\vec{d}+P txneard+P,txfard+P,tyneard+P,tyfard+P
如果 m a x ( t x n e a r , t y n e a r ) ≤ m i n ( t x f a r , t y f a r ) max(t_{xnear},t_{ynear})≤min(t_{xfar},t_{yfar}) max(txnear,tynear)≤min(txfar,tyfar),则射线与长方形相交
2、将Slabs推广到3D
3D的Slabs同2D,3D空间中判断射线是否与长方体构成的AABB包围盒相交的方法是,判断该射线在
x-slab,y-slab,z-slab之间的部分是否有公共区域。
我们假设射线为 L ( t ) = t D ⃗ + P L(t) =t\vec{D}+P L(t)=tD+P,其中P为射线起点, d ⃗ \vec{d} d为射线的方向,我们假设平面方程为
X n ⃗ = d X\vec{n}=d Xn=d,这是点法式,X为平面上的点, n ⃗ \vec{n} n 为平面法向量,d为原点到平面的有向距离。
我们将射线带入平面可得到
( t D ⃗ + P ) n ⃗ = d , 即 t = d − P n ⃗ n ⃗ D ⃗ (t\vec{D}+P)\vec{n}=d,即 t=\frac{d-P\vec{n}}{\vec{n}\vec{D}} (tD+P)n=d,即t=nDd−Pn,设P(px,py,pz),
D(Dx,Dy,Dz),在使用slabs的时候有两个分量为0,因此我们可以求得如下几个t值
x-slab: t x = ( d − p x ) / D x t_x=(d-p_x)/D_x tx=(d−px)/Dx
y-slab: t y = ( d − p y ) / D y t_y=(d-p_y)/D_y ty=(d−py)/Dy
z-slab: t z = ( d − p z ) / D z t_z=(d-p_z)/D_z tz=(d−pz)/Dz
接下去我们同样求解出 xnear,xfar,ynear,yfar,znear,zfar
此时,如果 m a x ( t x n e a r , t y n e a r , t z n e a r ) ≤ m i n ( t x f a r , t y f a r , t z f a r ) max(t_{xnear},t_{ynear},t_{znear})≤min(t_{xfar},t_{yfar},t_{zfar}) max(txnear,tynear,tznear)≤min(txfar,tyfar,tzfar),则射线与长方体相交
vec2 intersectBox(const Ray& ray, const Box& cube)
{
vec3 inv_dir = 1.0f / ray.direction;
vec3 tMin = (cube.min - ray.origin) * inv_dir;
vec3 tMax = (cube.max - ray.origin) * inv_dir;
vec3 t1 = min(tMin, tMax);
vec3 t2 = max(tMin, tMax);
float tNear = max(max(t1.x, t1.y), t1.z);
float tFar = min(min(t2.x, t2.y), t2.z);
return vec2(tNear, tFar);
}
如果返回值tNear > tFar则不相交,否则射线与AABB包围盒相交。














 7476
7476











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









