







目录
一、模糊推理过程
二、模糊PID算法理论实现
三、模糊PID算法的Simulink仿真
四、整理感悟
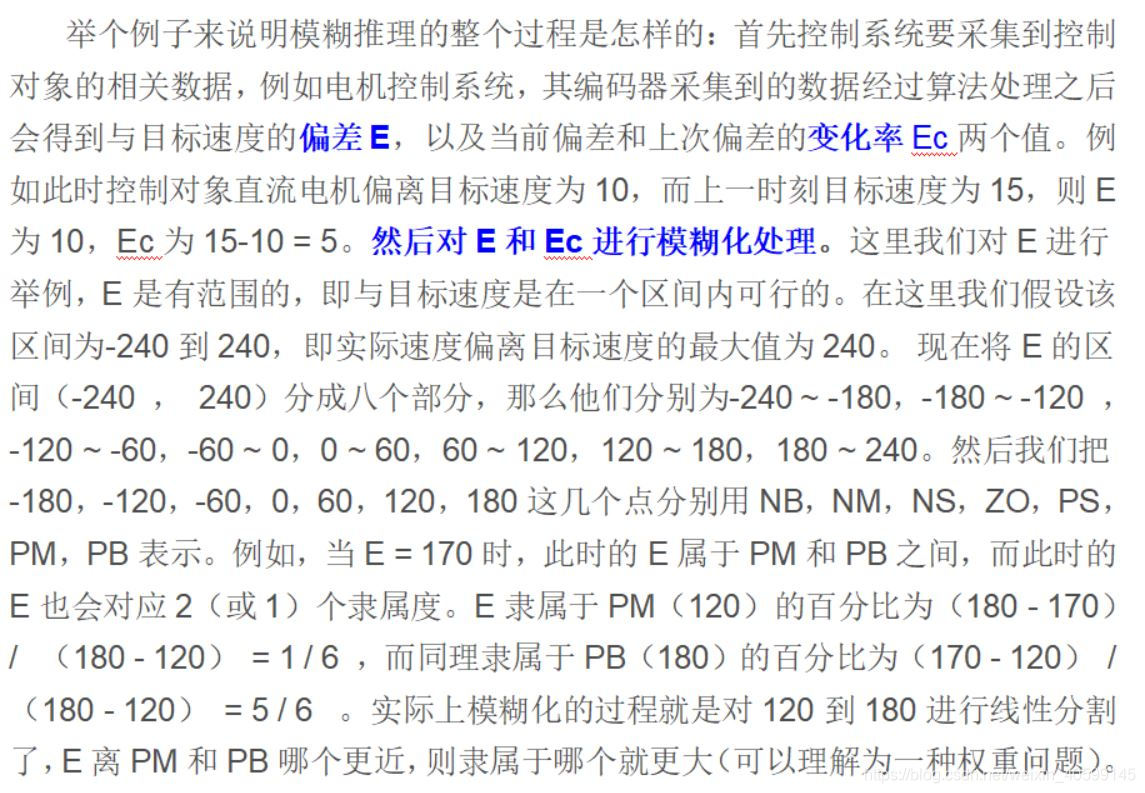
一、模糊推理过程
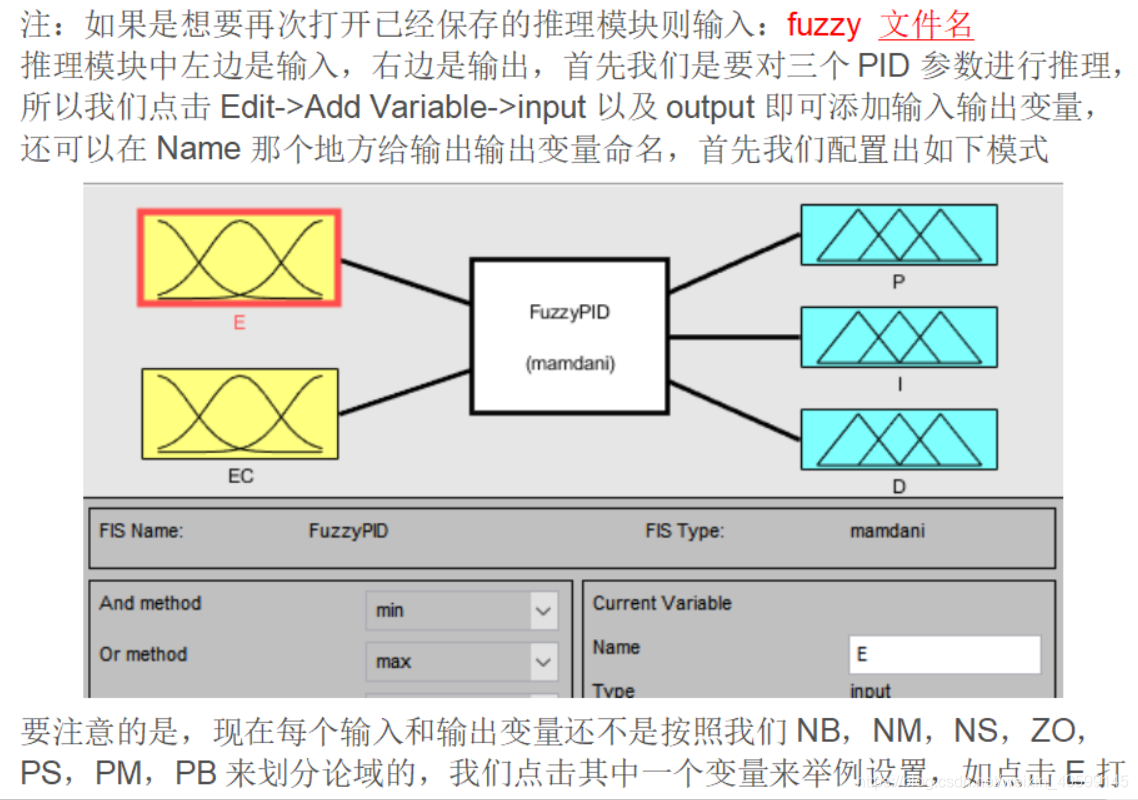
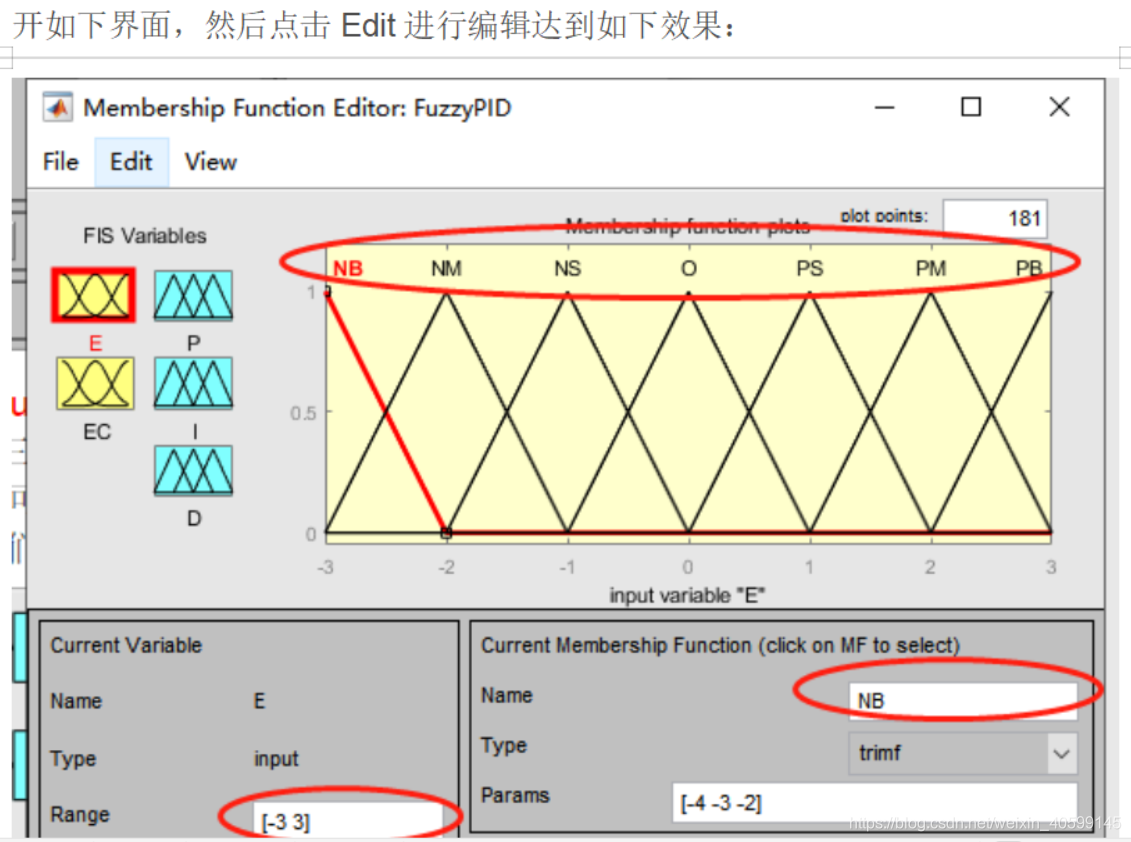
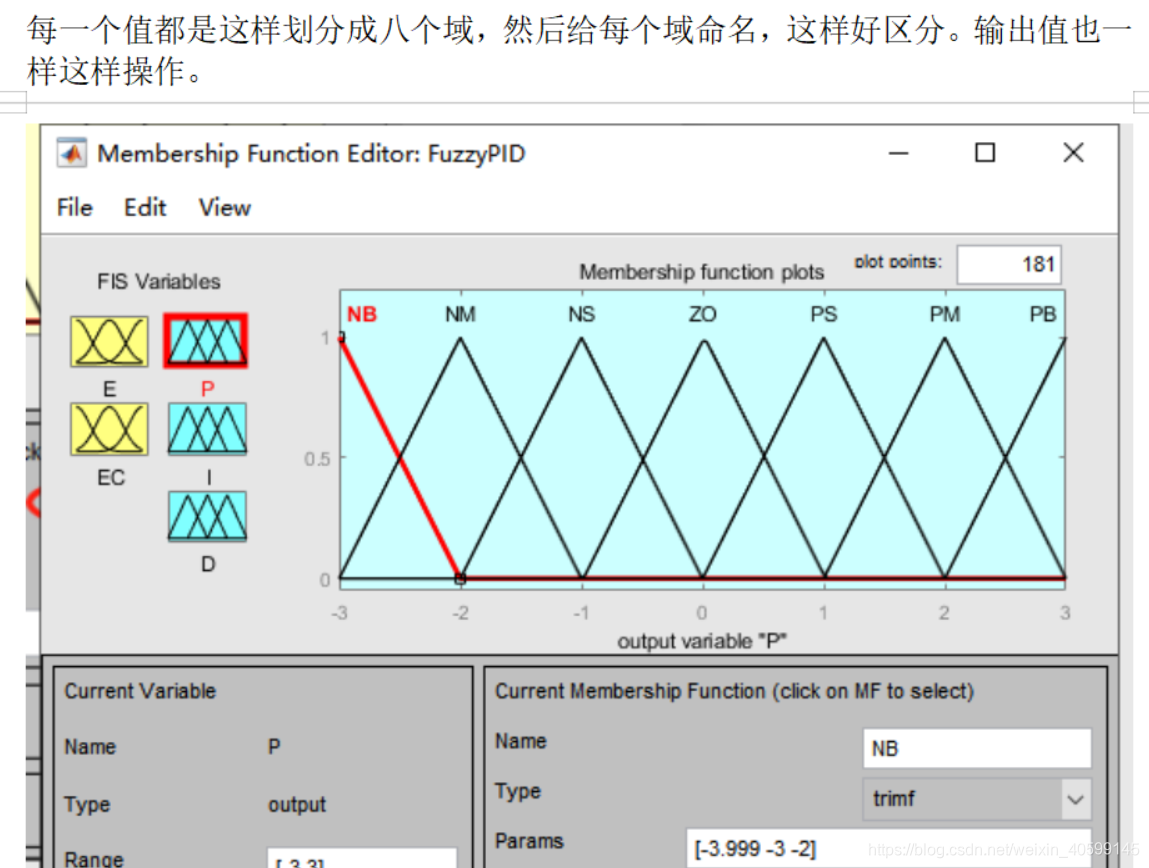
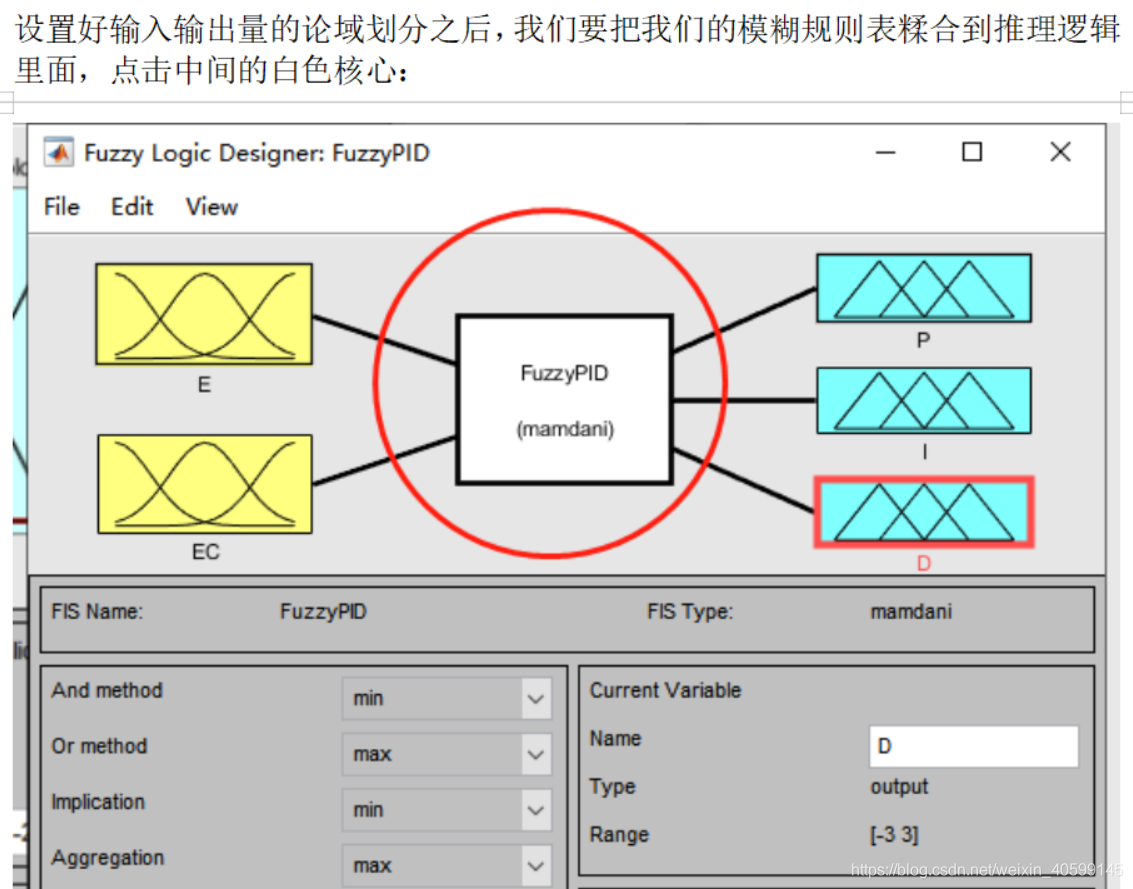
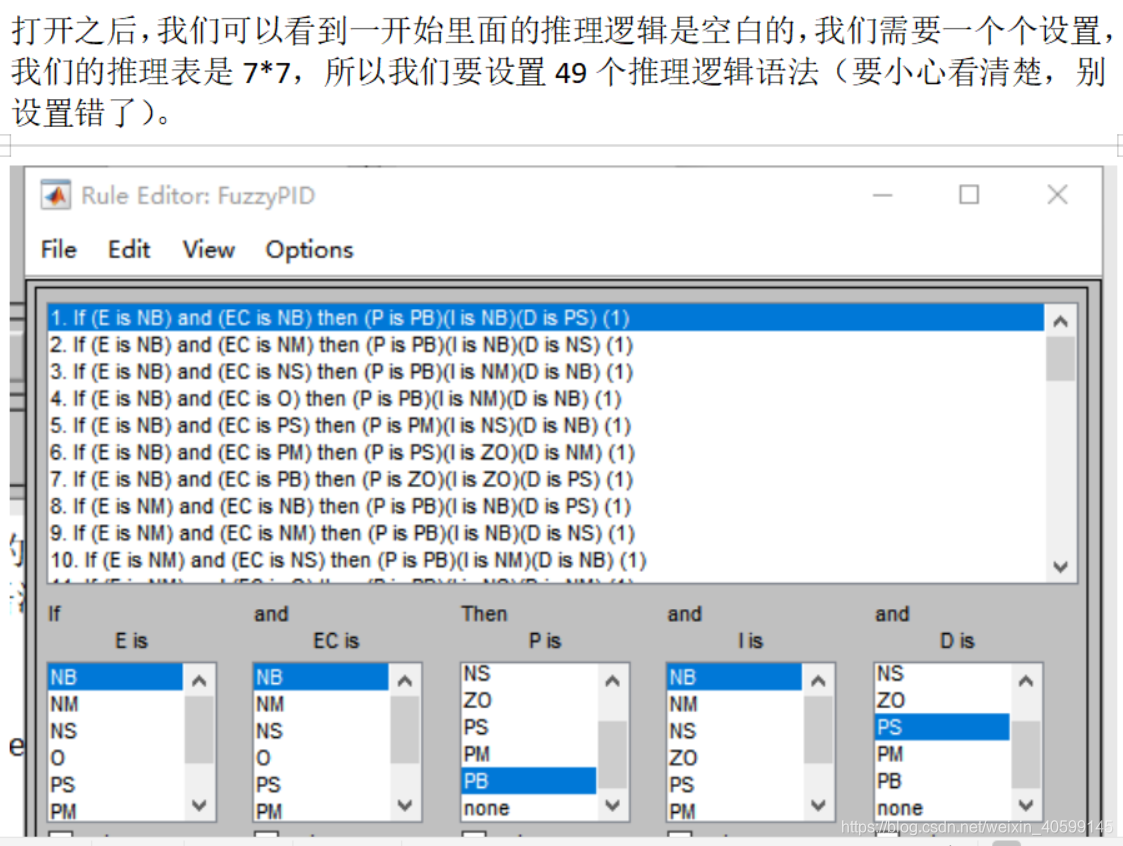
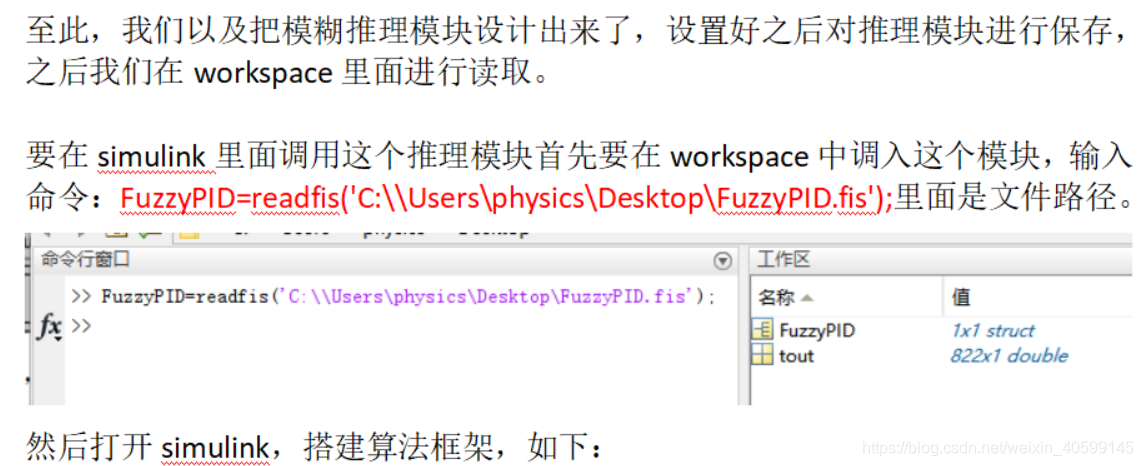
在搞懂模糊PID算法之前,首先来研究一下模糊推理过程是怎样的。

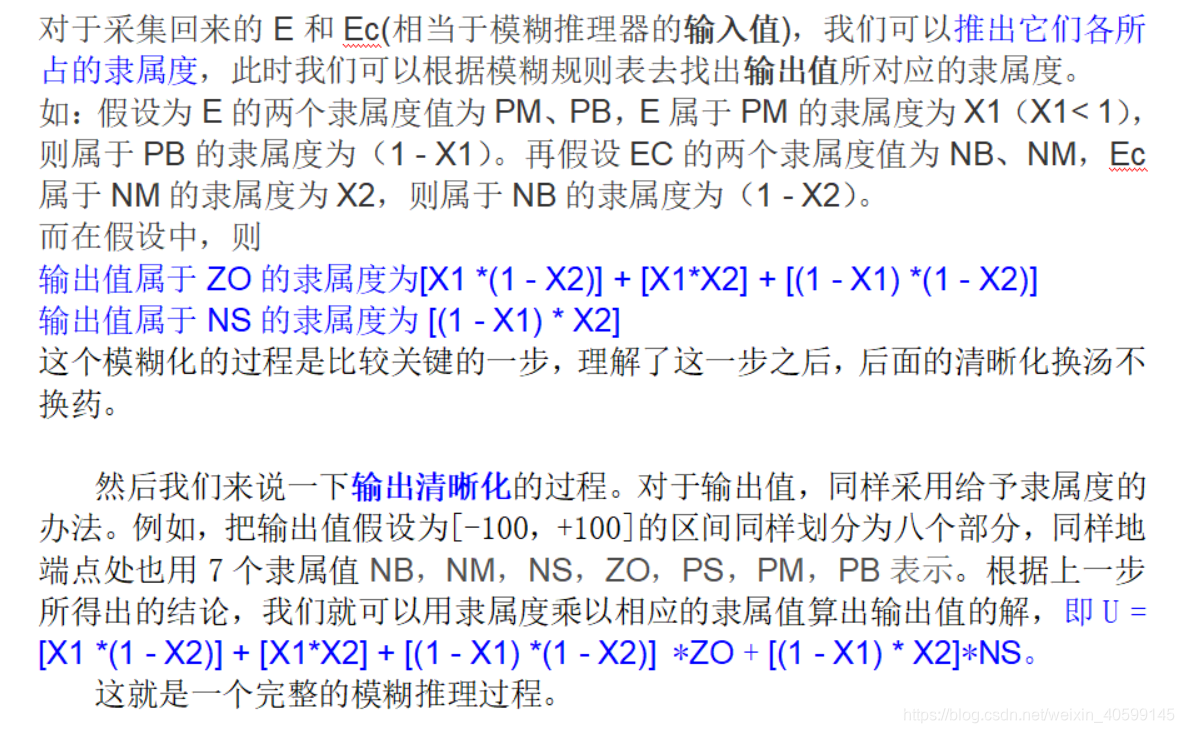
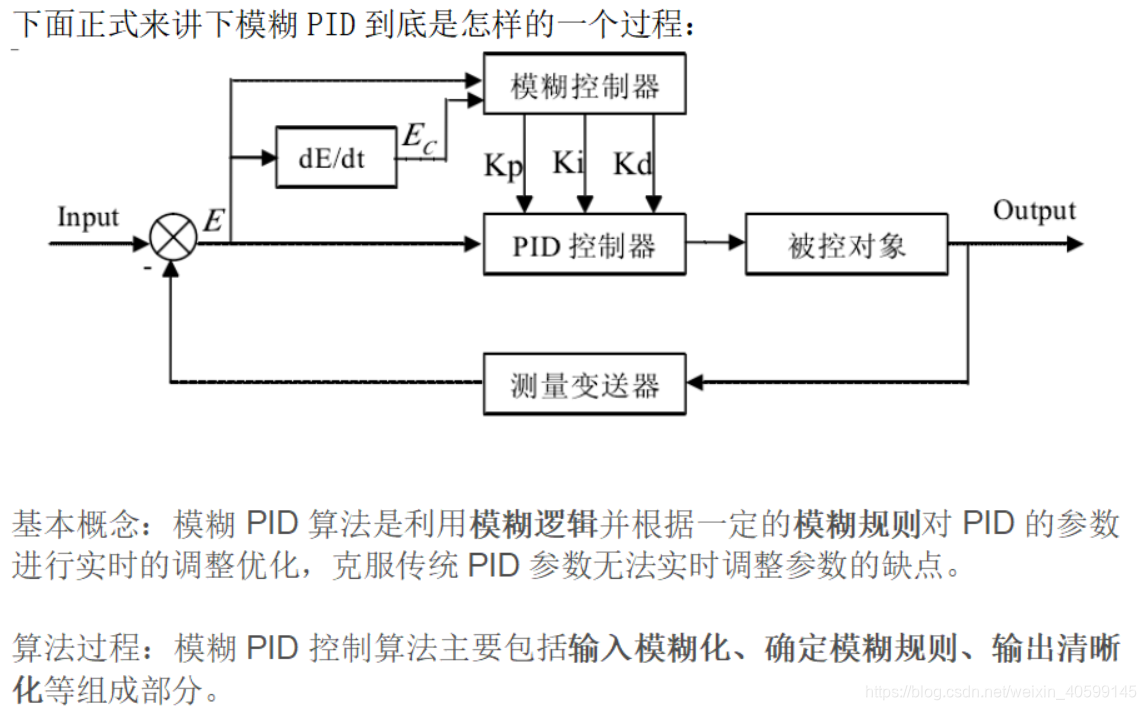
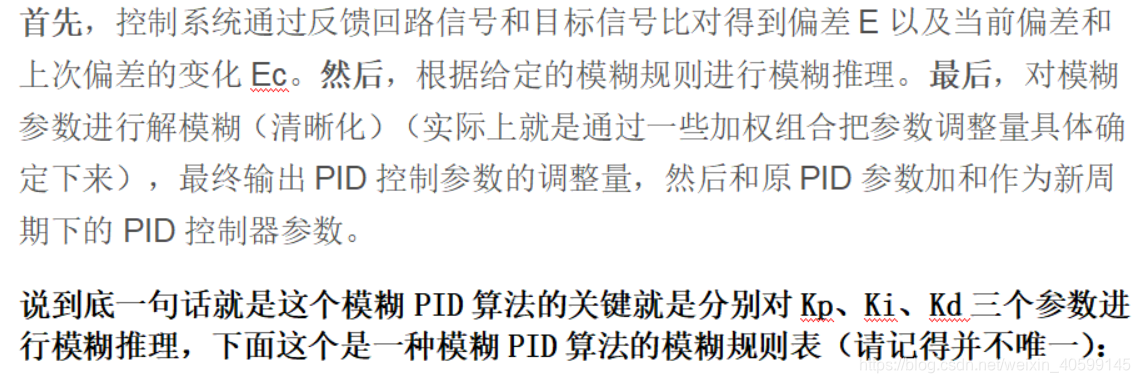
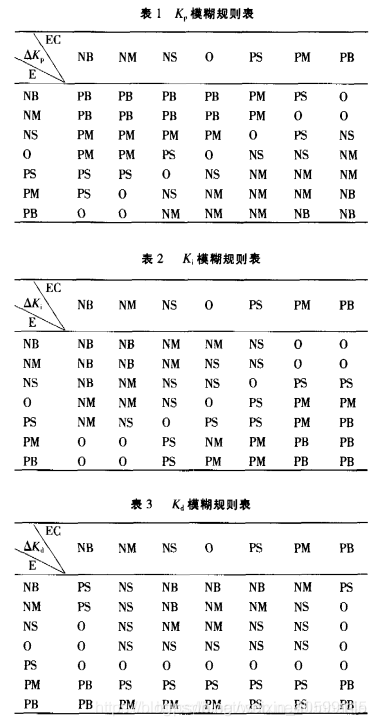
二、模糊PID算法的理论实现过程
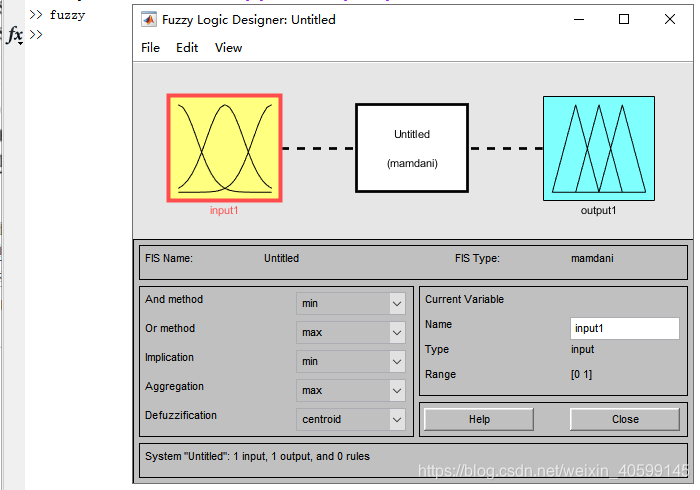
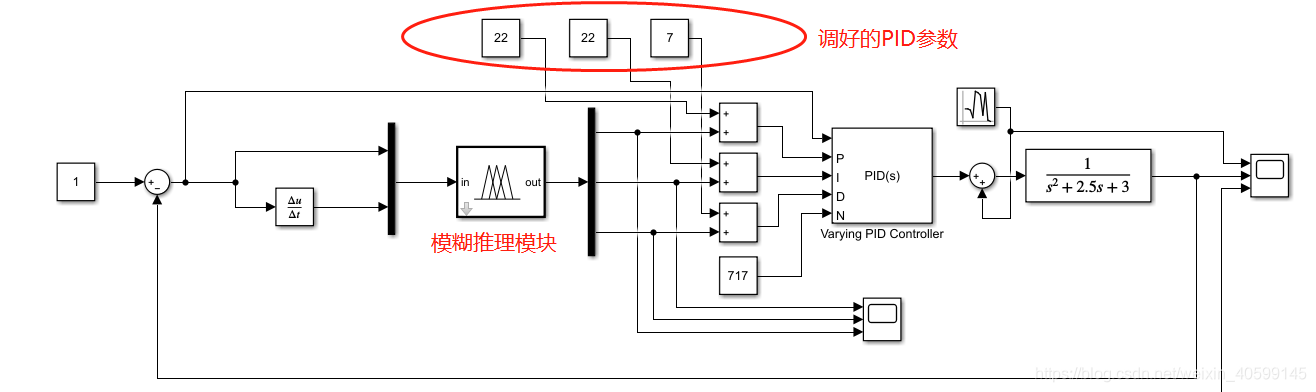
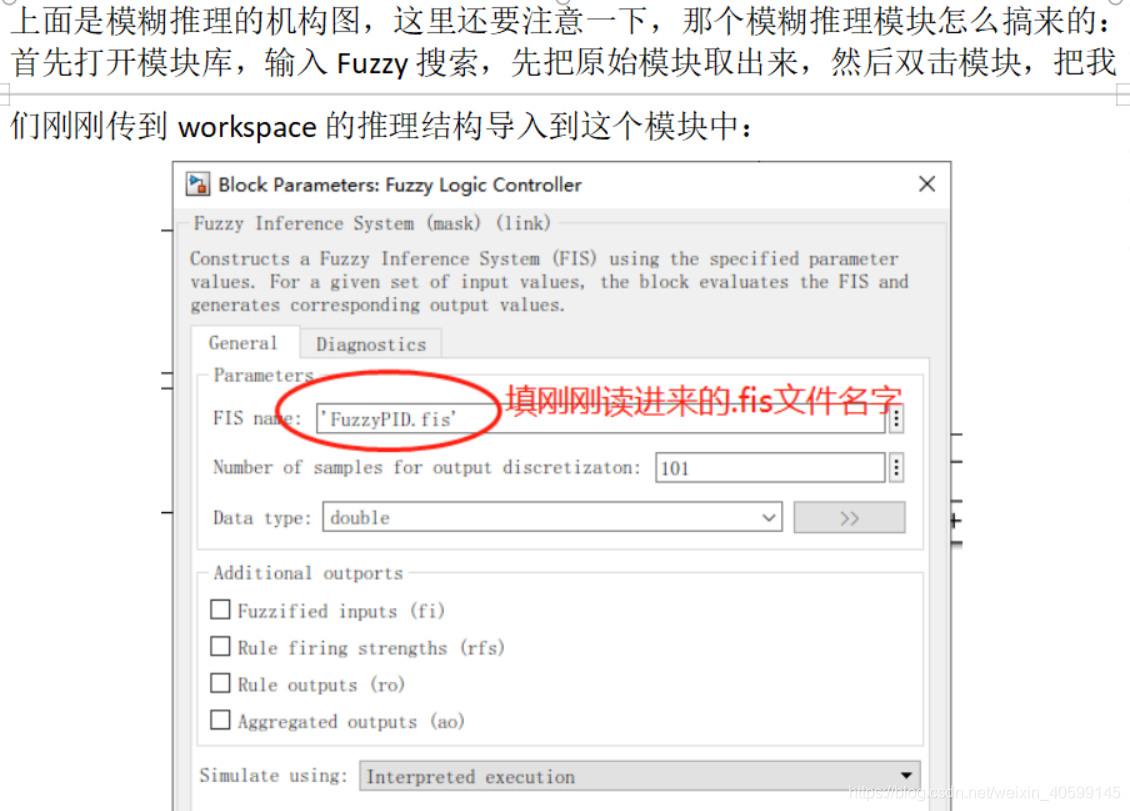
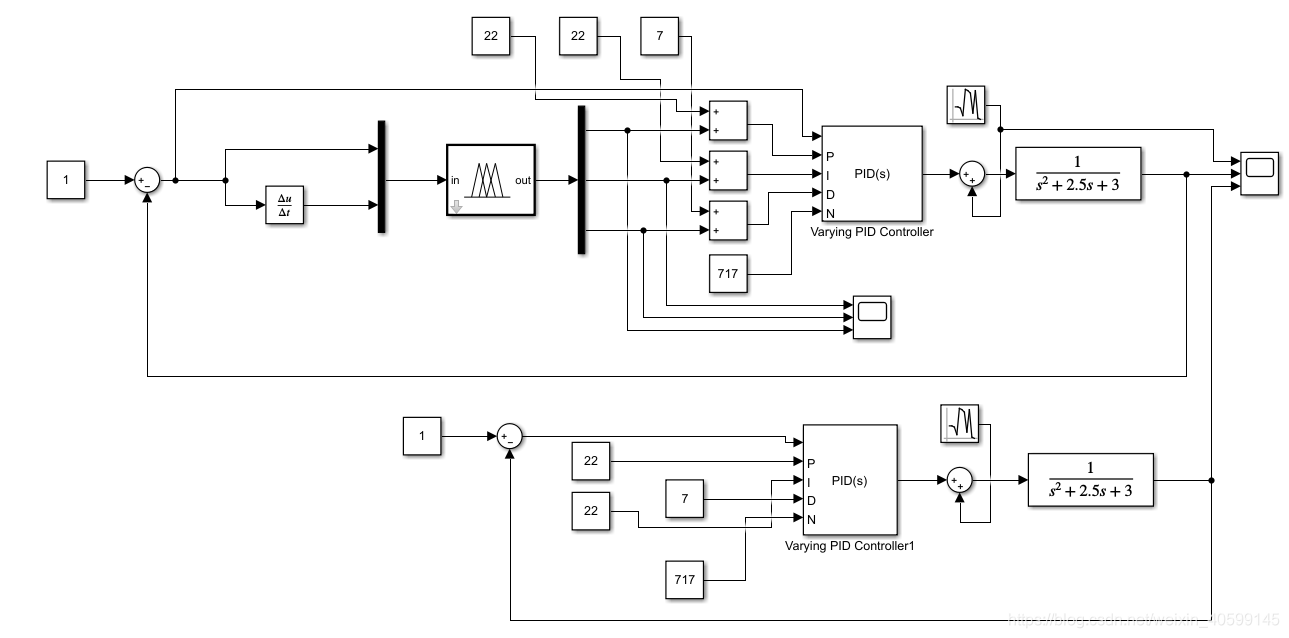
三、模糊PID算法的Simulink仿真
为了对比模糊PID和传统PID的区别,这里也做一个传统单环的PID来一起做输出对比。
运行之后,蓝色的是传统PID的输出,红色的是模糊PID的输出,输出在稳态范围内波动是因为干扰的存在,这种单环的PID相对于串级PID来说对干扰的抑制不是很好(当然这也和参数有关)
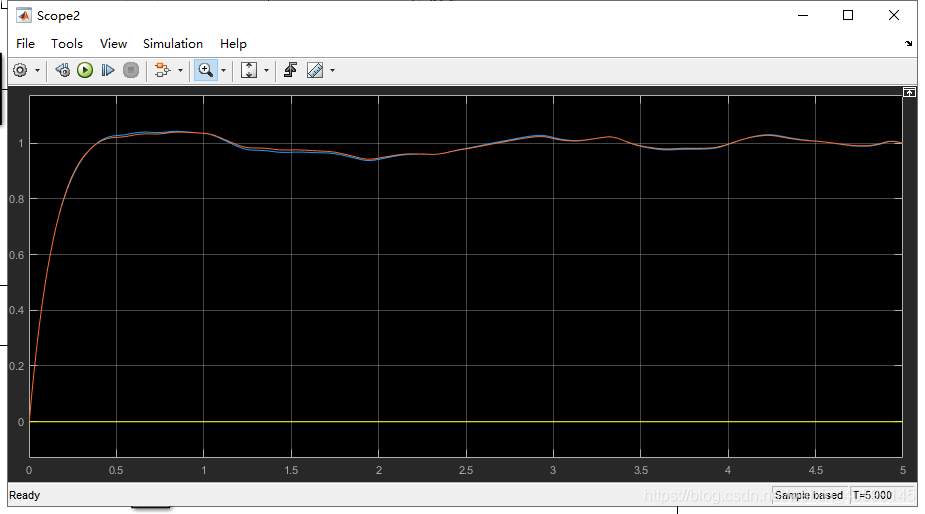
从仿真结果来看,这里其实模糊PID所起的作用并不是很大,两条曲线基本重合,下面直接对模糊PID的输出增益观测一下:
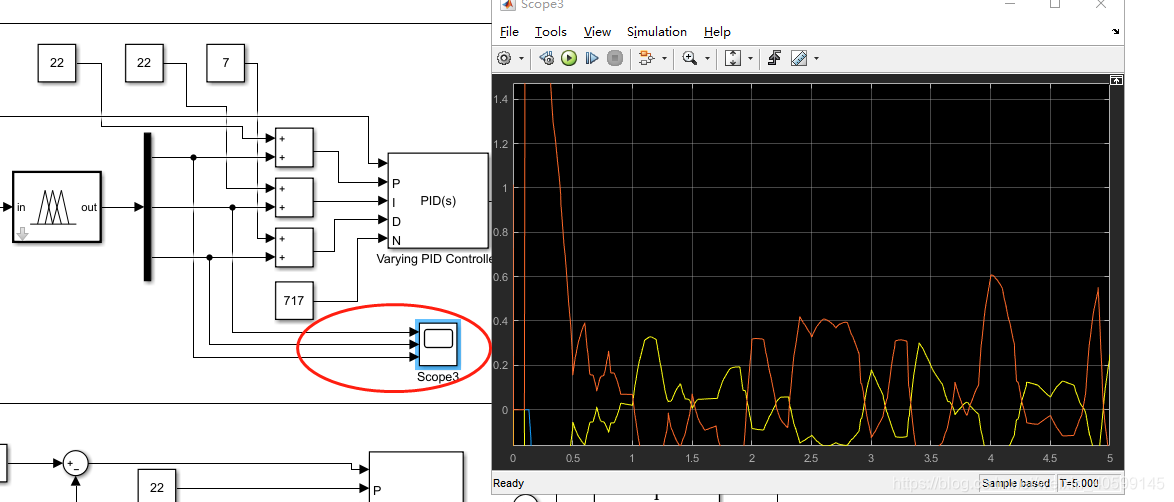
可以看到模糊推理器确实对PID的参数进行了调整,只不过是比较微小,只有0.4左右,所以效果并不是很明显,当然我们这里只是为了验证这种PID算法理论结果,体验这种自己亲手把理论知识转化到我们的实际项目中去的感觉。
四、整理感悟
整个仿真过程到此结束,实际上在在控制这种经典PID控制中更为关键的还是落实到对参数的整定上面,对于模糊PID算法而已,只是加入了一种模糊推理思想(类似于神经网络,也可以理解为一种综合考虑各种因素用权重来衡量各种因素对参数的影响)。这种模糊推理思想不单单可以应用于这种PID控制算法中,实际上也可以用于其他的一些控制方法中。

















 57
57

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









