










首先申明,本人非雷达专业,目前从事的 工作与雷达有关,所以开始学习雷达相关知识,但是查到的资料都是基于matlab的,很少有基于C++的,所以痛定思痛觉得自己整一套基于C++的雷达相关软件。万丈高楼平地起,今天正好周末,所以开始写了软件结构和界面,这个过程可能比较漫长,对于我这个非雷达相关专业的人来说还得边学边写,希望自己可以坚持下来。好了,废话不多说了,先看界面。
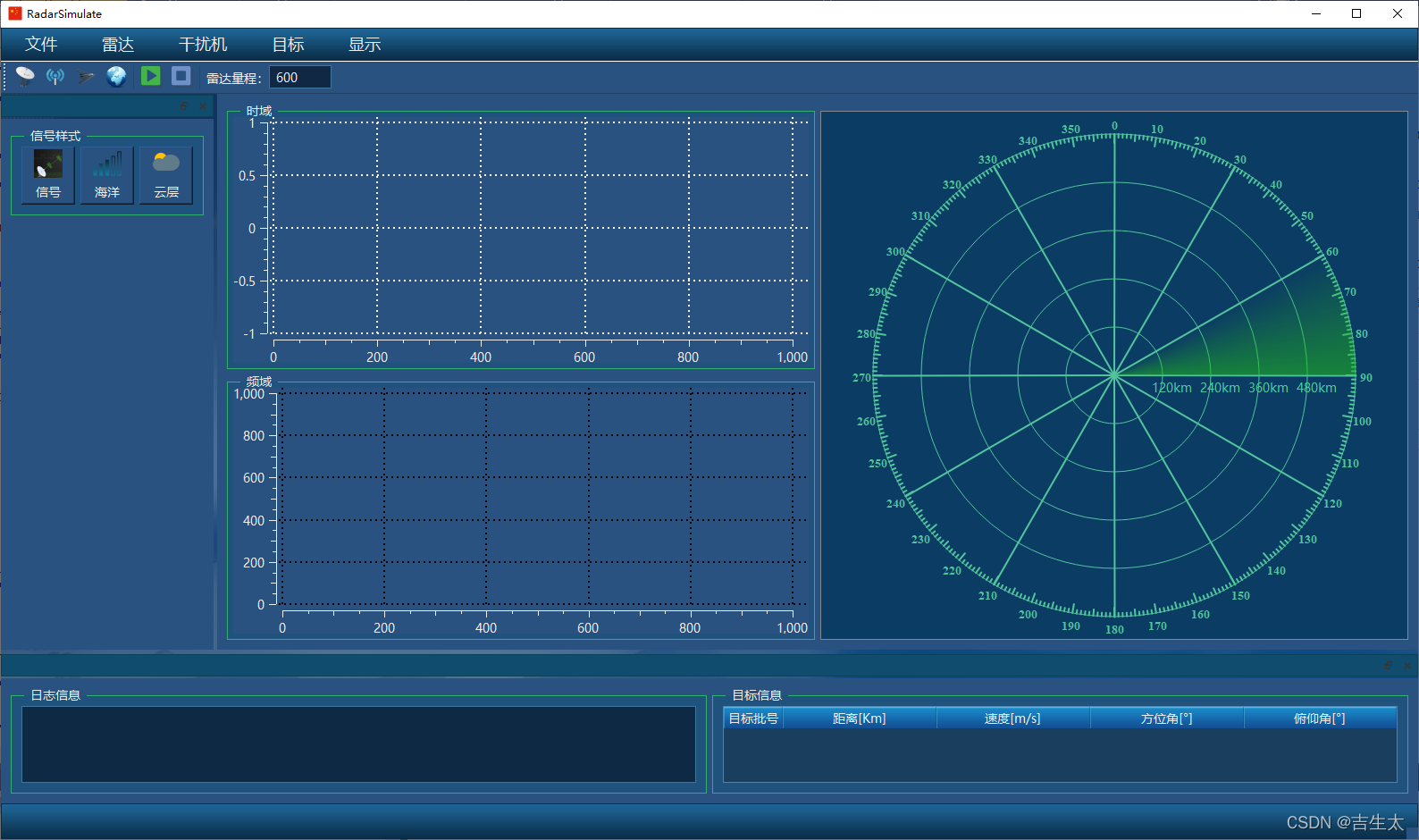
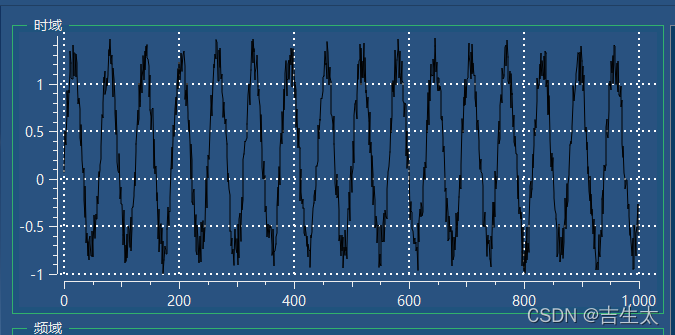
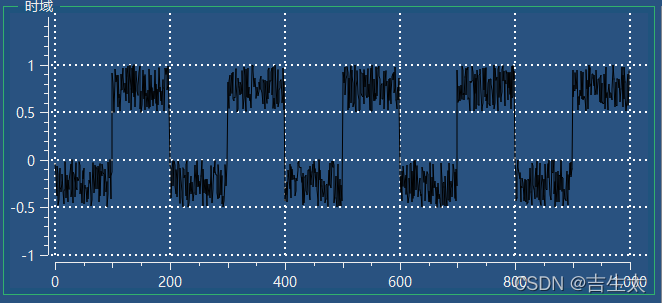
大体思路是软件左边绘制雷达回波数据,时域和频域的都绘制出来,右边在PPI上绘制雷达搜索到的目标,下一步把三维加上,三维模型准备用osgearth开发。现在知识简单的做了一个UI界面,没有添加任何算法,信号只是简单的写了个正弦信号和方波信号,添加了一些噪声在里面。


















 809
809

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











