






文章目录
-
- 概要
- 输入图像
- 形状图
概要
最近做了一些PMD的算法应用,比较有意思,跟大家分享一下。
目前工业检测使用的2.5D pmd方案主要通过分析编码条纹图的形变(通常是相位信息)来估算形状。主要应用在镜面反射物体上,如透镜、电池金属外壳、车漆等。
此技术具有较高的测量精度,但在实际应用中,受环境光照变化、表面粗糙度等因素的影响,条纹图案的反射可能会受到失真,导致最终得到的形状图具有较大的噪声和误差。因此,如何在增强形状图的过程中保留物体的真实细节,是一个比较有意思的过程。
尤其是测量一些镜面反射程度不高的物体,物体上的条纹不是很明显导致相位有较多噪声,对于形状图提取物体特征带来了麻烦。所以对形状图的局部特征增强就很重要喽。
话不多说,来看下效果吧
输入图像
输入一个方向或者两个方向的条纹图像,本次以一个方向四步相移图像为例,条纹图如下:

X1

X2

X3

X4
上面四张条纹图计算得到的相位图:

形状图
初始形状图:(部分细节明显不够明显)
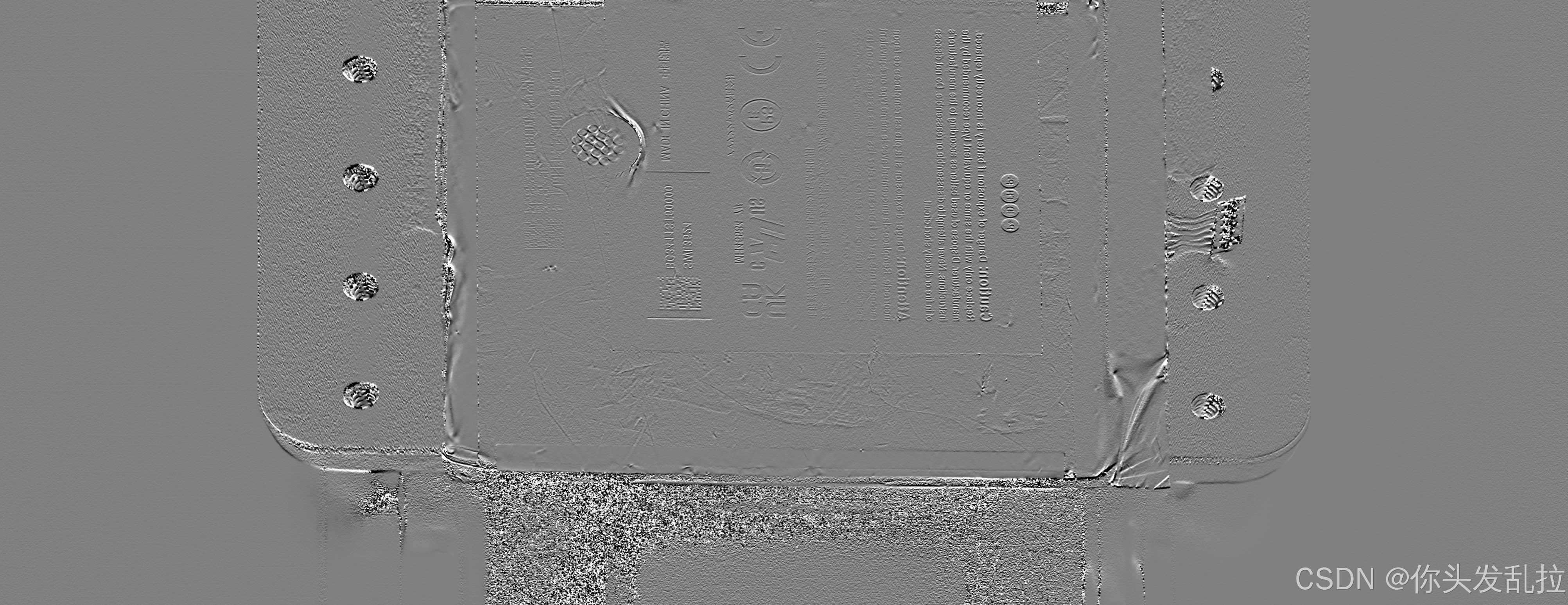
局部增强后:
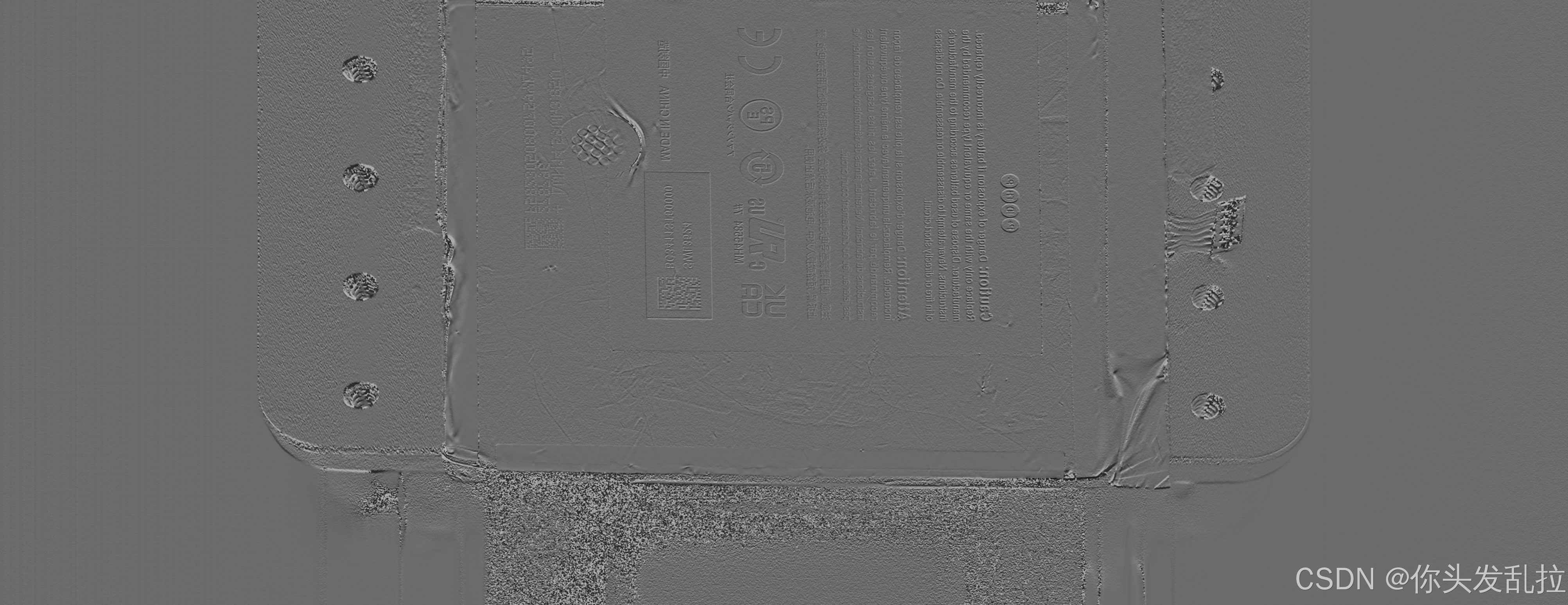
继续增强后:

可以看到局部增强后,部分细节可以被放大出来,并且计算量不大可用于线扫。
目前手里设备有限,没有大量数据进行实验,如果大家有典型的输入图像可私聊我测试~

















 1816
1816

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









