







知识点
快速的图像边缘滤波算法
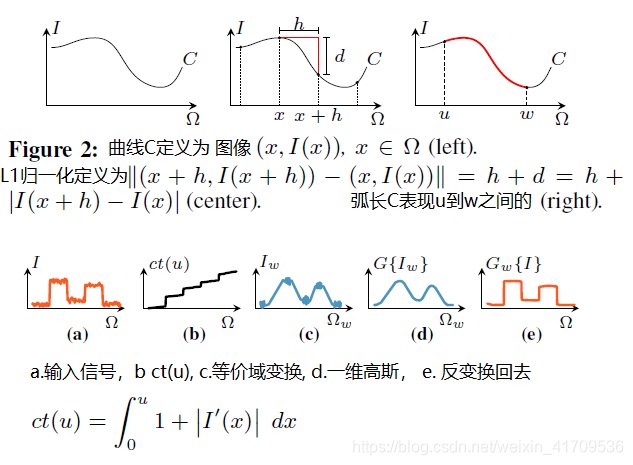
高斯双边模糊与mean shift均值模糊两种边缘保留滤波算法,都因为计算量比较大,无法实时实现图像边缘保留滤波,限制了它们的使用场景,OpenCV中还实现了一种快速的边缘保留滤波算法。高斯双边与mean shift均值在计算时候使用五维向量是其计算量大速度慢的根本原因,该算法通过等价变换到低纬维度空间,实现了数据降维与快速计算。
OpenCV API函数为:
void cv::edgePreservingFilter(
InputArray src,
OutputArray dst,
int flags = 1,
float sigma_s = 60,
float sigma_r = 0.4f
)
Python:
dst = cv.edgePreservingFilter( src[, dst[, flags[, sigma_s[, sigma_r]]]])
其中sigma_s的取值范围为0~200, sigma_r的取值范围为0~1
当sigma_s取值不变时候,sigma_r越大图像滤波效果越明显
当sigma_r取值不变时候,窗口sigma_s越大图像模糊效果越明显
当sgma_r取值很小的时候,窗口sigma_s取值无论如何变化,图像双边滤波效果都不好!
python代码
import cv2 as cv
import numpy as np
import time
src = cv.imread("C:/Users/qqxd/Desktop/opencvcode/images/example.png")
cv.namedWindow("input", cv.WINDOW_AUTOSIZE)
cv.imshow("input", src)
h, w = src.shape[:2]
#计算程序运行时间
start = time.clock()
dst = cv.edgePreservingFilter(src, sigma_s=100, sigma_r=0.4, flags=cv.RECURS_FILTER)
end = (time.clock()-start)
print("running time is %f" % (end))
result = np.zeros([h, w*2, 3], dtype=src.dtype)
result[0:h,0:w,:] = src
result[0:h,w:2*w,:] = dst
cv.imshow("result", result)
# cv.imwrite("D:/result.png", result)
cv.waitKey(0)
cv.destroyAllWindows()
c++代码
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int artc, char** argv) {
Mat src = imread("C:/Users/qqxd/Desktop/opencvcode/images/example.png");
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
namedWindow("input", WINDOW_AUTOSIZE);
imshow("input", src);
Mat dst;
double tt = getTickCount();
edgePreservingFilter(src, dst, 1, 60, 0.44);
//计算程序运行时间
double end = (getTickCount() - tt) / getTickFrequency();
printf("time consume : %f\n ", end);
imshow("result", dst);
waitKey(0);
return 0;
}
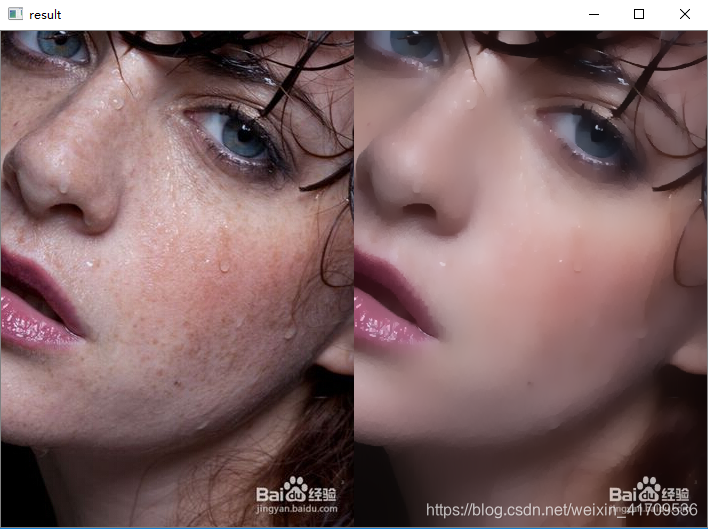
运行结果如下:















 1159
1159











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









