






摘要
本文关于基于fpga的cmos工业相机项目工程概览与总结,涉及以下内容:
1、模块总结:整体设计方案、子模块划分、关键技术点/信号
2、调试:关键模块、信号的仿真、调试总结
3、硬件布局:引脚配置、核心供电等硬件、结构设计总结
4、方案优化:现有方案的优化、改造及向新方案的靠拢分析
1模块总结
1.1概述
●CMOS CL0402 作为图像传感芯片,曝光后产生一定格式的图像数据;
●FPGA ZYNQ7020 作为主控芯片负责cmos驱动控制、图像像素的采集、cmos寄存器的配置、cameralink协议的实现、上位机串口通信的实现;
●Cameralink端子实现图像数据的高速串行发送,将数据传送至采集卡PC端。
系统工作流程如下: FPGA 上电加载配置程序,计算机通过异步串口向 FPGA 发送控制信息,FPGA对接收的控制信息进行分析判断。通过SPI接口设 置 CMOS 工 作 模 式,通过判断的信息产生相机的驱动时序,实现相机的正常工作。相机被驱动后,数字图像数据通过 LVDS 信号输 出给主控芯片 FPGA,FPGA 将接收的图像数据进行处理,转换为 Camera-Link 标准数据,通过 Camera-Link 接口芯片输给后端装有 Camera-Link 采集卡的计算机,计算机对接收的数据进行处理、存储。
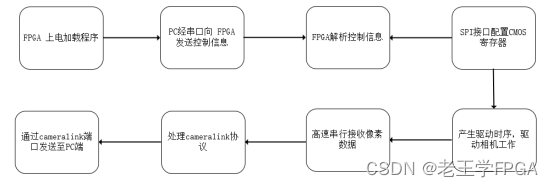
图 1-1 项目工作流程
1.1.1顶层端口
顶层的端口主要包括几个部分,分别是cmos触发端口、cmos寄存器配置端口、cmos图像数据端口、cameralink端口、串口通信端口
表1-1 顶层模块端口描述
| 端口名 | 方向/位宽 | 描述 |
| etgr_in | I/1bit | 外部触发源信号输入 |
| triggle | O/1bit | cmos触发信号输出 |
| cmos_rstn | O/1bit | cmos复位信号 |
| cp | I/4bit | 采集卡输出的控制信号p端,作为外触发方式之一 |
| cn | I/4bit | 采集卡输出的控制信号n端,作为外触发方式之一 |
| spi_clk | O/1bit | Spi接口时钟信号 |
| spi_in | O/1bit | spi写信号 |
| spi_cs | O/1bit | Spi片选信号,高有效 |
| spi_out | I/1bit | spi读信号线 |
| CMOS_O_Cp | I/12bit | Cmos输出12通道像素数据P |
| CMOS_O_Cn | I/12bit | Cmos输出12通道像素数据n |
| CMOS_p | I/1bit | cmos输出240M像素时钟p |
| CMOS_p | I/1bit | cmos输入240M像素时钟p |
| clkp_in | O/1bit | cmos输入480M参考时钟p |
| clkn_in | O/1bit | cmos输入480M参考时钟n |
| clk_to_pins_p | O/1bit | Cameralink输入时钟p(40M) |
| clk_to_pins_n | O/1bit | Cameralink输入时钟n(40M) |
| data_out_to_pins_p | O/4bit | cameralink的4组串行数据通道 |
| data_out_to_pins_p | O/4bit | cameralink的4组串行数据通道 |
| sertc_p | I/1bit | 串口输入p端,与PC通信 |
| sertc_n | I/1bit | 串口输入n端,与PC通信 |
| sertfg_p | O/1bit | 串口输出p端,与PC通信 |
| sertfg_n | O/1bit | 串口输出n端,与PC通信 |
| p_e1 | O/1bit | Cmos VDD1 上电使能 |
| p_e2 | O/1bit | Cmos VDD2 上电使能 |
| p_e3 | O/1bit | Cmos VDD3 上电使能 |
1.1.2模块划分
整个fpga编程主要划分为以下几个部分或模块:
- cmos 高速串行数据采集模块HSSDP
- Cameralink传输模块 CameraLink_Transmitter
- Cmos寄存器配置模块Cmos_Config_top
- PC通信模块Communication
- AXI协议模块
- Zynq 系统配置核
将各子模块分别封装成独立模块,在顶层中例化使用。
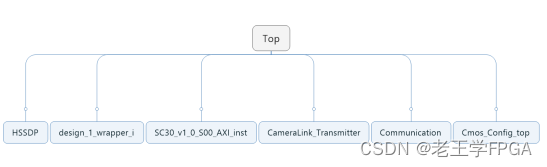
图 1-3 模块划分结构图
表1-2 子模块功能描述
| 模块名 | 功能描述 |
| HSSDP | 采集图像数据,Cmos高速串行数据转并行 |
| CameraLink_Transmitter | 实现cmeralink协议,将数据送至cmeralink端口 |
| Cmos_Config_top | 实现spi读写时序、上电时序,对cmos的寄存器进行配置 |
| Communication | 实现串口读写时序、解析上位机通信协议、根据触发模式生成cmos触发信号等。 |
| design_1_wrapper_i | Zynq system 配置顶层 |
| SC30_v1_0_S00_AXI_inst | AXI 协议,实现PS端对PL端的读写 |
图 1-4 项目的RTL视图
1.2主要子模块介绍
1.2.1 Cmos_Config_top 模块
主要负责寄存器的配置、实现spi读写协议、实现上电顺序控制。

图 2-1 Cmos_Config_top端口示意图
表 2-1 Cmos_Config_top主要端口描述
| 端口名 | 方向/位宽 | 描述 |
| Read_add | I/8bit | Fpga读cmos寄存器的地址 |
| Rxbuff | O/32bit | Fpga读出的cmos寄存器数据(返回到PS端处理) |
| spi_out | I/1bit | Fpga读cmos寄存器spi端口 |
| Rx_en | I/1bit | Fpga读cmos寄存器使能信号 |
| Write_add | 1/8bit | Fpga写cmos寄存器的地址 |
| Write_data | I/8bit | Fpga写cmos寄存器数据 |
| tx_en | I/1bit | Fpga写cmos寄存器使能信号 |
| spi_in | O/1bit | Fpga写cmos寄存器spi端口 |
| Spi_bit_rate | I/6bit | Spi的比特率 |
| Spi_cs | O/1bit | spi片选信号,高有效 |
| Spi_clk | O/1bit | Spi时钟,最大5M |
| Stream_en | O/1bit | 寄存器配置完成标志信号 |
Cmos配置时序:
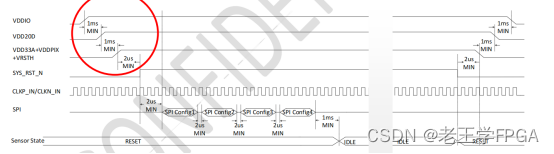
图 2-2 Cmos上电时序图
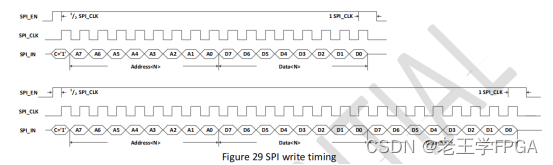
图 2-3 spi写cmos寄存器时序
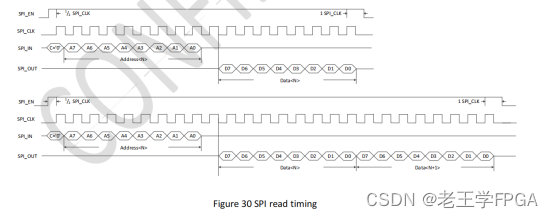
图 2-4 spi读cmos寄存器时序
1.2.2 HSSDP 模块
端口描述:

图 2-4 HSSDP端口示意图
表 2-2 HSSDP主要端口描述
| 端口名 | 方向/位宽 | 描述 |
| CMOS_SLVS_Cn | I/1bit | cmos输出像素采样时钟n端 |
| CMOS_SLVS_Cp | I/1bit | cmos输出像素采样时钟p端 |
| CMOS_SLVS_n | I/12bit | cmos像素输出通道n端 |
| CMOS_SLVS_p | I/12bit | cmos像素输出通道p端 |
| m_axis_tdata | O/8bit | Axis 数据线 |
| m_axis_tkeep | O/1bit | 字节有效标志。1:数据线高8位有效 |
| m_axis_tlast | O/1bit | 行结束标志 |
| m_axis_tuser | O/1bit | 帧结束标志 |
| m_axis_tvalid | O/1bit | 数据有效 |
Cmos数据格式:
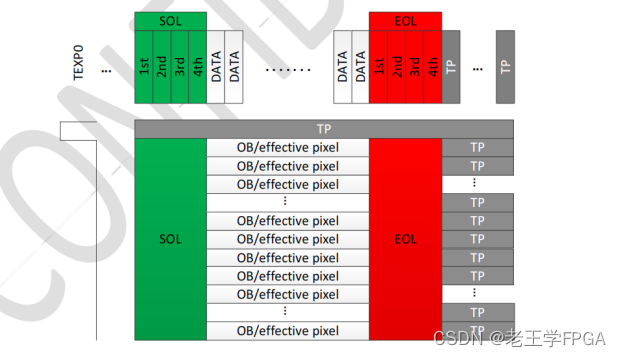

图 2-5 cmos的数据读出格式
FPGA处理:
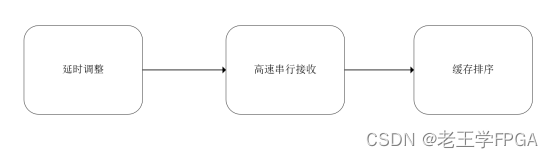
图 2-6 HSSDP 模块处理步骤
通过clk和data两对差分线进行传输,由于clk的布线与data的布线存在长短上的差异,主机传输到从机后clk和data的延时各不相同。如果我们希望在时钟上升沿上采集数据,但由于线的延时,可能在时钟上升沿时数据处于变化状态,这将会导致采集的数据错误。通过IDELAYE2原语可将某根信号线进行延时操作(目前状态延时1092ps),以达到在时钟上升沿数据处于稳定的操作。如果当clk和data信号延时较大时,仅仅使用IDELAYE2无法达到预期,此时ISERDESE2就派上用途。
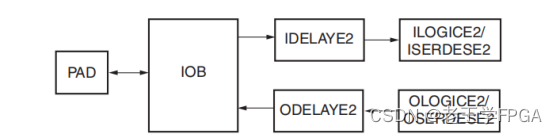
图 2-6 xilinx的SelectIO Logic Resources
当ISERDESE2(例化12个)的输出端口为8位时,由于cmos的像素时12位的,需要进行bit拼接。
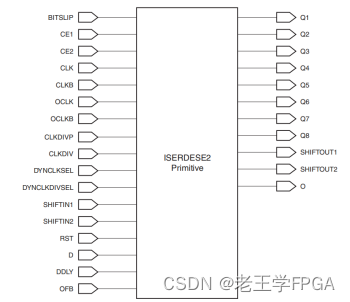
图 2-7 xilinx的ISERDES2 示意图

图 2-8 缓存排序仿真
1.2.3 CameraLink_Transmitter模块
端口描述:
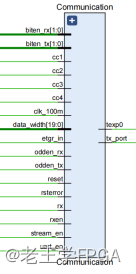
图 2-15 communication模块端口示意图
表 2-3 communication模块主要端口描述
| 端口名 | 方向/位宽 | 描述 |
| cc1、cc2、cc3、cc4 | I/1bit | PC端采集卡触发 |
| data_width | I/20bit | 串口位脉宽(表征波特率) |
| etgr_in | I/1bit | 外部触发信号 |
| rsterror | I/1bit | 接收校验错误后复位 |
| rx | 1/1bit | 串口接收 |
| stream_en | I/1bit | cmos配置完后使能触发模块 |
| tx_port | O/1bit | 串口发送 |
| tex_p0 | O/1bit | cmos触发信号(trigger) |
cmos 触发时序:
内部触发
定义:相机通过设备内部信号采集每行图像,并根据相关参数的设置输出每帧图像。
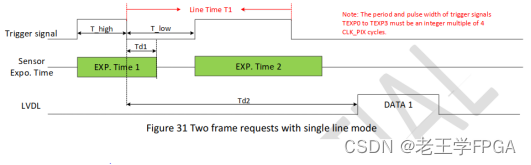
图 2-16 cmos触发信号时序
● Trigger signal:fpga内部根据时序和上位机参数要求产生
● 触发源:无
● 参数:每帧的行数、帧/行频、曝光时间
相关参数:
1)每帧行数
帧触发时,用来控制输出图像的高度
2)曝光时间
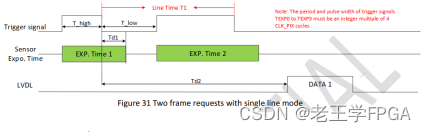
曝光时间=T_high+Td1
3)行/帧频

行时间=T_high+T_low;行频=1/(T_high+T_low)
帧时间=Hwidth*行时间;帧频=1/帧时间。
1.2.5 时钟部分
时钟概述:
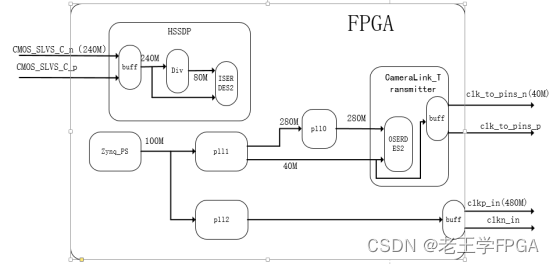
图 2-17 主要时钟信号示意图
时钟说明:
CMOS_SLVS_C_n(p):cmos 输出的像素采样时钟,240M,为DDR差分对时钟信号。用于串行像素数据信号的采样。
Clk_to_pins_n(p):cameralink接口的时钟输入40M
Clkp(n)_in: cmos的驱动时钟480M。
HSSDP:将输入的差分时钟转单端,再利用分频器将其分频为80M时钟,作为ISERDES2的快、慢时钟输入。
Cameralink_Transmitter: pll1生成两路时钟分别是280M和40M,pll0对pll1输出的280M时钟进行相位调整。280M和40M分别作为OSERDES2的快。慢时钟输入。















 457
457











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









